Асинхронний двигун як об’єкт керування
Асинхронні електродвигуни (АД) зараз є самими поширеними в промисловості і сільському господарстві. Вони більш прості в експлуатації, мають меншу масу і габарити і ціну в порівнянні з двигунами постійного струму.
До недавнього часу вони використовувались в основному на нерегульованому електроприводі. У зв’язку з появою силових тиристорних пристроїв – перетворювачів напруги і частоти – росте число регульованих пристроїв з АД.
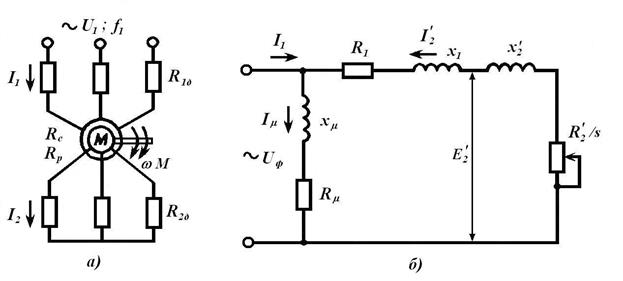
Рис. 2.3. Схема включення (а) і заміщення (б) трьохфазного АД
Основна схема включення трьохфазного АД і відповідна їй спрощена схема заміщення з винесеним контуром намагнічування показана на рис. 2.3, а, б. На схемі використані наступні позначення: U1, Uф – діючі значення лінійної і фазної напруги мережі, I1, Im, I2¢ – відповідно струми обмотки статора, контуру намагнічування та струм ротора зведений до обмотки статора, R1 = Rc + R1д і х1 – сумарний активний і індуктивний опори фази статора, Ом; Rm і хm - фазні значення активного та індуктивного опорів контуру намагнічування, Ом; R2¢ = Rр¢ + R¢2д і х2¢– сумарний активний і індуктивний опори фази обмотки ротора, зведені до обмотки статора, Ом; Rc, R1д – активні опори обмотки статора і додаткового резистора, Ом; S – ковзання асинхронного двигуна – це різниця між швидкістю обертання магнітного поля і ротора у відносних одиницях. Ковзання знаходиться як відношення різниці між синхронною ( wс, рад/с) і дійсною ( w, рад/с) швидкістю ротора до синхронної швидкості:
|
|
|
 , (2.2)
, (2.2)
де f1 – частота напруги мережі, Гц; р – число пар полюсів двигуна.
Струм обмотки ротора, зведений до обмотки статора за схемою рис.2.3, б визначається рівнянням:
 (2.3)
(2.3)
де хк = х1 + х2 ¢ – індуктивний опір двигуна при короткому замиканні.
Рівняння для механічної характеристики АД можна отримати розглянувши баланс потужності в мережі ротора. Втрати потужності в мережі ротора рахуємо за формулою:
 (2.4)
(2.4)
Через електричні величини втрати потужності рахуються так:
 (2.5)
(2.5)
З попередніх рівнянь складемо рівняння електромагнітного моменту двигуна:
 (2.6)
(2.6)
На рис. 2.4 приведена механічна характеристика АД. Вона відповідає певному чергуванню фаз напруги живлення мережі U1. При зміні порядку чергування двох фаз АД має таку ж саму механічну характеристику, яка розташована симетрично від початку координат.
|
|
|

Рис. 2.4. Механічна характеристика АД
Характерні точки механічної характеристики АД наступні:
1) точка ідеального холостого ходу S = 0, w = wс, М = 0;
2) точка короткого замикання S = 1, w = 0, М = Мп;
3) критична, екстремальна точка S = Sк, w = wк, М = Мк;
4) точка номінального режиму S = Sн, w = wн, М = Мн.
Досліджуючи рівняння (6.6) на екстремум знайдемо електромагнітний момент двигуна в екстремальній, критичній, точці, Нм:
 , (2.7)
, (2.7)
де коефіцієнт  (2.8)
(2.8)
По спрощеній формулі, коли не враховувати активний опір статора, знайдемо механічну характеристику:
 (2.9)
(2.9)
Підставивши в рівняння (6.9) номінальне значення ковзання електродвигуна і таку характеристику двигуна, як відношення критичного моменту до номінального l м = Мк/Мн, знайдемо ковзання електродвигуна в екстремальній, критичній, точці :
 (2.10)
(2.10)
Час перехідного процесу від початкової wпоч до кінцевої wкін швидкості рахується за формулою, с:
|
|
|
 (2.11)
(2.11)
Дата добавления: 2019-02-13; просмотров: 112; Мы поможем в написании вашей работы! |

Мы поможем в написании ваших работ!