ПРИВЕДЕНИЕ СИСТЕМЫ СИЛ К ЗАДАННОМУ ЦЕНТРУ
Лемма о параллельном переносе силы
Лемма. Силу можно переносить параллельно самой себе в любую наперед заданную точку, называемую центром приведения, присоединив к ней при этом пару, момент которой равен моменту первоначальной силы относительно центра приведения.
Доказательство.
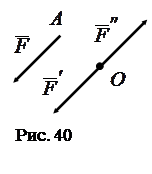 Пусть сила
Пусть сила  приложена в точке
приложена в точке  . Перенесем её в заданную точку
. Перенесем её в заданную точку  (рис. 40). Для этого в точке
(рис. 40). Для этого в точке  приложим силы
приложим силы  и
и  такие, что
такие, что  ,
,  .
.
Тогда  . Момент пары равен:
. Момент пары равен:
 ,
,
так как 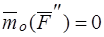 – линия действия силы
– линия действия силы  проходит через точку
проходит через точку  .
.
Теорема Пуансо (о приведении системы сил к заданному центру)
Теорема. Любая система сил эквивалентна системе, состоящей из силы и пары сил. Сила приложена в любой наперед заданной точке (центре приведения) и геометрически равна главному вектору системы сил. Момент пары равен главному моменту исходной системы сил относительно центра приведения.
Доказательство.
 |
Пусть точка
– центр приведения (полюс приведения). Приведем исходную систему сил  к центру
к центру  , пользуясь леммой о параллельном переносе силы.
, пользуясь леммой о параллельном переносе силы.
Вначале приведем силу  к заданному центру (рис. 41), которая будет эквивалентна силе
к заданному центру (рис. 41), которая будет эквивалентна силе  и паре
и паре  :
:
 ,
,  .
.
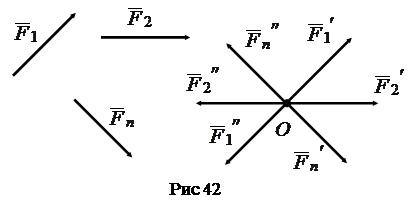 |
Аналогично поступим с остальными силами исходной системы
 (рис. 42).
(рис. 42).
Получим, что система  ~
~  и парам
и парам  ,
,  ,…,
,…,  . Силы
. Силы  приложены в точке
приложены в точке  (сходящиеся силы) и могут быть заменены одной силой, приложенной в точке
(сходящиеся силы) и могут быть заменены одной силой, приложенной в точке  и геометрически равной главному вектору
и геометрически равной главному вектору
 .
.
Система пар  ,
,  ,…, по теореме о "сложении" пар эквивалентна одной паре
,…, по теореме о "сложении" пар эквивалентна одной паре  , момент которой равен сумме моментов всех пар системы, которая в свою очередь равна главному моменту исходной системы сил относительно центра приведения
, момент которой равен сумме моментов всех пар системы, которая в свою очередь равна главному моменту исходной системы сил относительно центра приведения

 .
.
Теорема доказана.
Частные случаи приведения системы сил к заданному центру
Пусть в результате приведения системы сил к заданному центру получилось:
1.  ,
,  — система находится в равновесии; можно сказать, что она приводится к прямо противоположным силам.
— система находится в равновесии; можно сказать, что она приводится к прямо противоположным силам.
2.  ,
,  — сила отсутствует, система приводится к паре сил. Выбор полюса приведения не влияет на момент пары сил.
— сила отсутствует, система приводится к паре сил. Выбор полюса приведения не влияет на момент пары сил.
3.  ,
,  — система приводится к одной силе – равнодействующей.
— система приводится к одной силе – равнодействующей.
4. 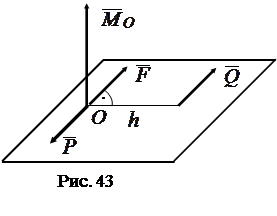
 ,
,  ,
, 
Через точку проведем плоскость, перпендикулярную вектору момента  (рис. 43). Приведем систему сил к силе
(рис. 43). Приведем систему сил к силе  и паре сил
и паре сил  , – центр приведения. Сила
, – центр приведения. Сила  лежит в проведенной плоскости, приложена в центре приведения
лежит в проведенной плоскости, приложена в центре приведения  и равна главному вектору:
и равна главному вектору:  . Пара сил
. Пара сил 
с моментом  также лежит в проведенной плоскости. Одну из сил пары выберем равной и прямо противоположной силе
также лежит в проведенной плоскости. Одну из сил пары выберем равной и прямо противоположной силе  :
:  . Другую силу пары
. Другую силу пары  (
(  ) проводим так, чтобы момент пары был равен главному моменту системы сил, то есть
) проводим так, чтобы момент пары был равен главному моменту системы сил, то есть  .
.
Полученная система сил  эквивалентна одной силе
эквивалентна одной силе  , так как применяя элементарную операцию, прямо противоположные силы
, так как применяя элементарную операцию, прямо противоположные силы  и
и  можно отбросить. Система сил приводится к равнодействующей.
можно отбросить. Система сил приводится к равнодействующей.
Общий признак существования равнодействующей
Объединяя частные случаи 2 и 4 можно установить общий признак существования равнодействующей.
Система сил приводится к равнодействующей, если главный вектор не равен нулю, а скалярное произведение главного вектора на главный момент равно нулю:
,  .
.
Действительно,  (при
(при  ), если
), если  или
или  , то есть
, то есть  .
.
5.  ,
,  , //
, //  .
.
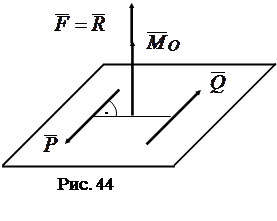 Плоскость пары перпендикулярна векторам силы
Плоскость пары перпендикулярна векторам силы  и момента
и момента  . Таким образом, система эквивалентна силе
. Таким образом, система эквивалентна силе  и паре
и паре  , плоскость которой перпендикулярна силе (рис. 44)
, плоскость которой перпендикулярна силе (рис. 44)
Определение. Совокупность силы и пары сил, которая лежит в плоскости, перпендикулярной этой силе называют динамическим винтом или динамой.
6.
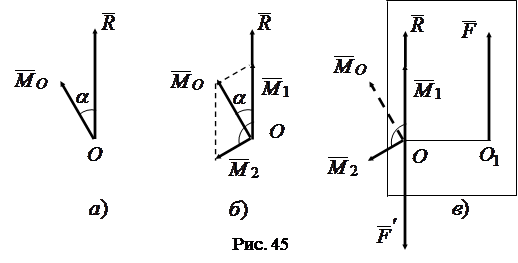 |
,  ,
,  (рис. 45а).
(рис. 45а).
Разложим вектор момента  на две составляющие:
на две составляющие:  //
//  ,
,  (рис 45б). Через точку
(рис 45б). Через точку  проведем плоскость, перпендикулярную вектору
проведем плоскость, перпендикулярную вектору  и построим пару
и построим пару  такую, что
такую, что  ,
,  , а момент пары
, а момент пары  (рис. 45в). Таким образом, сила
(рис. 45в). Таким образом, сила  и пара сил с моментом
и пара сил с моментом  эквивалентны силе
эквивалентны силе  , приложенной в точек
, приложенной в точек  , на расстоянии:
, на расстоянии:
 .
.
Следовательно, исходная система сил эквивалентна силе и паре сил с моментом  , причем векторы
, причем векторы  и параллельны. Система приводится к динаме.
и параллельны. Система приводится к динаме.
Общий признак приведения системы сил к динаме
Объединяя случаи 5 и 6, получим:
Система сил эквивалентна динаме, если скалярное произведение её главного вектора на главный момент не равно нулю:
 .
.
Теорема Пуансо и частные случаи из нее позволяют привести заданную систему сил к простейшему виду.
Простейшие виды системы сил Условия приведения
1. Прямопротивоположные силы  .
.
2. Пара сил  .
.
3. Одна сила (равнодействующая)  .
.
4. Динама  .
.
Инварианты системы сил
Определение. Инвариантами системы сил называются величины, не зависящие от выбора центра приведения, то есть величины, которые остаются неизменными при преобразовании данной системы сил в другую, ей эквивалентную.
1-й инвариант – главный вектор системы сил  .
.
2-й инвариант – скалярное произведение главного вектора на главный момент 
Доказательство.
Пусть известно скалярное произведение  для системы сил, приведенной к полюсу . Вычислим то же произведение
для системы сил, приведенной к полюсу . Вычислим то же произведение  для системы сил, приведенной к другому полюсу . Главный вектор не зависит от выбора полюса; для нового центра приведения главный момент будет иным:
для системы сил, приведенной к другому полюсу . Главный вектор не зависит от выбора полюса; для нового центра приведения главный момент будет иным:

(по теореме о зависимости между главными моментами системы сил относительно двух полюсов).
Тогда:
 ,
,
так как по правилам вычисления смешанного произведения

( векторное произведение параллельных векторов равно нулю).
Таким образом  .
.
Дата добавления: 2019-02-12; просмотров: 446; Мы поможем в написании вашей работы! |

Мы поможем в написании ваших работ!