Вивчення конструкцій і розрахунок параметрів стрілових систем портальних кранів
Аналіз конструкцій і роботи стрілових систем різних типів.
На перевантажувальних, будівельних і монтажних портальних кранах зміна вильоту вантажу є робочим рухом, який здійснюється шляхом зміни положення елементів стрілової системи.
З метою зниження потужності приводу механізму зміни вильоту і підвищення точності позиціювання вантажу при зміні вильоту, до стрілових систем портальних кранів висуваються дві основні вимоги:
1 Стрілова система повинна бути зрівноважена.
2 Стрілова система повинна забезпечити горизонтальну або достатньо пологу траєкторію руху вантажу при зменшенні вильоту.
На практиці найбільше поширення набули такі типи стріловидних систем [7]:
1 Прямі стріли зі зрівняльними пристроями (зрівняльним поліспастом і зрівняльним блоком).
2 Шарнірно-з’єднані стріли з профільованим хоботом та гнучкою або жорсткою відтяжкою.
На прямій стрілі зі зрівняльним поліспастом (рис. 3.1) відстань Li між блоками зрівняльного поліспаста при колиханні стріли змінюється, внаслідок чого підйомний канат перекочується по блокам цього поліспаста, змінюючи величину li підвісу вантажу. Зміна довжини підвісу liтака, що вона компенсує величину підйому або опускання кінцевих блоків стріли, забезпечуючи достатньо близьку до горизонталі траєкторію руху вантажу при колиханні стріли.
При колиханні стріли будемо мати (рис. 3.1)
 (3.1)
(3.1)
Де Uзір Uв – кратність відповідно до зрівняльного та вантажного поліспастів.
Пряма стріла зі зрівняльним блоком (рис. 3.2), внаслідок рухомості останнього, також забезпечує приблизно горизонтальний рух вантажу при колиханні стріли. Змінювані відстані Si і Li приводять до перекочування підйомного каната по зрівняльному блоку і блоку на кінці стріли, що приводить до змінної величини li підвісу вантажу.
При колиханні стріли будемо мати:
 (3.2)
(3.2)
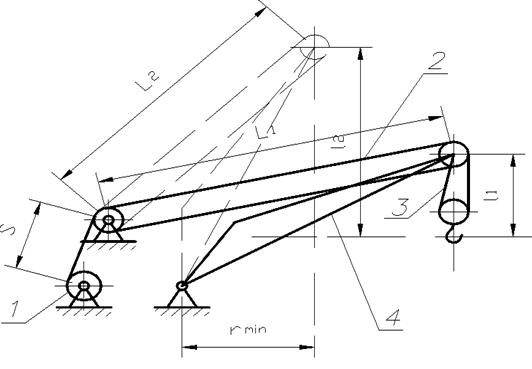
1 – барабан механізму підйому; 2 – зрівняльний поліспаст;
3 – вантажний поліспаст; 4 – стріла.
Рисунок 3.1 – Пряма стріла зі зрівняльним поліспастом
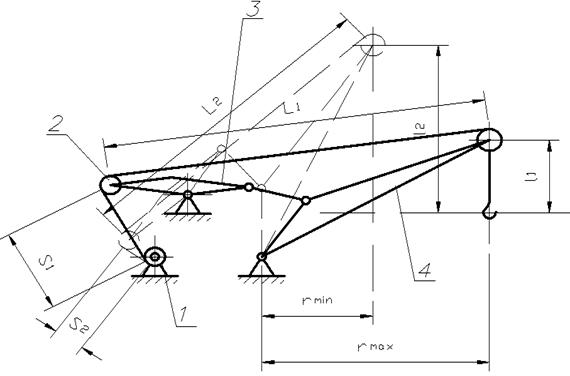
1 – барабан механізму підйому; 2 – зрівняльний блок;
3 – клихаючий важіль; 4 – стріла.
Рисунок 3.2 – Пряма стріла зі зрівняльним блоком
Шарнірно-з’єднані стріли з прямим хоботом являють собою шарнірні чотириланкові механізми, які включають стрілу, хобот, відтяжку і стійку (рис. 3.3). Кінець консольної частини хобота здійснює складну траєкторію, яка описується рівнянням шостого порядку і носить назву лемніската. На окремих ділянках лемніскати кінець хобота здійснює дуже пологу траєкторію, яка наближається до горизонталі. Траєкторії вантажу і кінця хобота будуть однакові у тому випадку, якщо підйомний канат буде проходити паралельно осі стріли або осі жорсткої відтяжки (рис. 3.3). При цьому підйомний канат, при колиханні стріли, не буде перекочуватися по блокам. Напрямок каната вздовж стріли є недоцільним, тому що приводить до незручного розташування механізму підйому біля кореня стріли, ускладнює намотку канатів на барабан, а також збільшує зусилля стиснення стріли.
Стрілові системи з гнучкою відтяжкою мають такі переваги, в порівнюючи з системами з жорсткою відтяжкою:
1 Легше за масою приблизно на 30%;
2 Менше трудомісткі при монтажі;
3 Мають меншу навітряну площу, що приводить до зниження вітрового навантаження на механізм зміни вильоту.
4 Дозволяють застосовувати над машинним відділенням каркас меншої ширини для установки опор колихання відтяжки.
У свою чергу, жорстка відтяжка розвантажує стрілу від скручувальних навантажень, які виникають при несталому русі механізму обертання і при розгойдуванні вантажу на канатах в плоскості, яка перпендикулярна плоскості колихання стріли.. Це дозволяє зменшити масу стріли.
Як правило гнучка відтяжка на портальних кранах великої вантажопідйомності (більше 25 т) не застосовується.
У випадку, коли підйомний канат не проходить по контуру стріли або відтяжки, траєкторії вантажу і кінця хобота будуть різними. Для забезпечення горизонтального переміщення вантажу, кінцевий блок хобота повинен переміщуватися по відповідній траєкторії (рис. 3.4).
Довжина підвісу вантажу li буде змінною внаслідок перекочування каната по блокам хобота і стріли. Така стрілова система дозволяє скоротити довжину хобота, а значить, і масу системи. Але перекочування каната по блокам при зміні вильоту збільшує інтенсивність зносу канатів, що у ряді випадків є вирішальним фактором вибору типу стрілової системи.
Зрівняльний аналіз прямих і шарнірно-з’єднальних стріл дозволяє визначити їх переваги і недоліки.
Переваги прямих стріл: більш проста конструкція, менша маса, не зазнає кручення при пусках і гальмуваннях механізму повороту. Недоліки: обмеження габариту вантажу під стрілою на малих вильотах, менша жорсткість, велика висота підвісу вантажу, яка приводить до тривалого колихання вантажу з великою амплітудою і необхідністю багатократних пусків і гальмувань механізмів з метою погашення цих колихань.
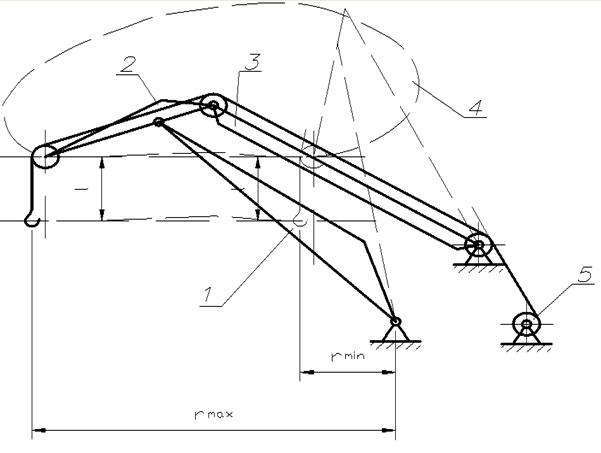
1 – стріла; 2 – хобот; 3 – відтяжка; 4 – траєкторія руху кінця хобота (лемніската); 5 – барабан механізму підйому.
Рисунок 3.3 – Шарнірно-з’єднана стріла з прямим хоботом і жорсткою відтяжкою.
Шарнірно-з’єднані стріли мають меншу висоту підвісу вантажу, більшу жорсткість і дозволяють на малих вильотах розташування під стрілою вантажу великих габаритів. Стріли зазнають кручення, яке зменшується при жорсткій відтяжці.
Для портальних кранів перспективним слід визнати шарнірно-з’єднані стріли з профільованим хоботом для вантажопідйомностей 10…300 т; і прямі стріли зі зрівняльним поліспастом або блоком для вантажопідйомностей до 10 т. Зарубіжна практика свідчить про застосування прямих стріл і на кранах великої вантажопідйомності.
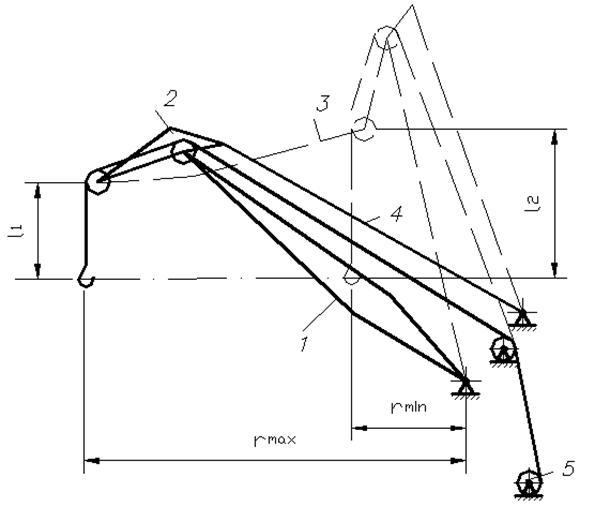
1 – стріла; 2 – хобот; 3 – траєкторія руху кінця хобота; 4 – гнучка відтяжка; 5–відхиляючи блоки; 6 – барабан механізму підйому.
Рисунок 3.4 – Шарнірно-з’єднана стріла з прямим хоботом і гнучкою відтяжкою.
3.2 Мета роботи. Вихідні дані для розрахунку.
Проектування стрілових систем з урахуванням висунутих до них вимог являє собою достатньо складну задачу. Ця задача ще більш ускладнюється при проектуванні стрілових систем з оптимальними параметрами [7,8]. Існують також особливості проектування стрілових систем різних типів.
У цій практичній роботі проектування стрілової системи виконується за спрощеною методикою [9] і стосовно тільки одного типу - шарнірно-з’єднаної стрілової системи з профільованим хоботом і жорсткою відтяжкою.
Виконання студентами цієї роботи ставить метою:
1 Вивчити конструкції стрілових систем та зрівноважених пристроїв портальних кранів;
2 Вивчити методику проектування стрілової системи заданого типу;
3 Оцінити практичну прийнятність одержаних результатів і, при необхідності, виконати відповідну коректировку.
Вихідними даними для проектування являються (рис. 3.5):
Н – висота кінця хобота відносно осі колихання стріли, м;
Rmax і Rmin – максимальний і мінімальний виліт вантажу, м;
f – відстань по горизонталі від осі колихання стріли до осі обертання крана, м;
Рекомендується приймати (рис. 3.5):
γ1 = 5…10°, γ2 = 5…10°, γ3 = 10…25°, φmin = 40…55° (3.3)
На основі вихідних даних необхідно визначити (рис. 3.5):
Lс – довжина стріли, м; Lх – довжина хобота, м; Lп – довжина перекладки (задня частина хобота), м; Lв – довжина відтяжки, м;
S і h – координати осі колихання відтяжки, м;
уmax – максимальне відхилення кінця хобота від горизонталі, м.
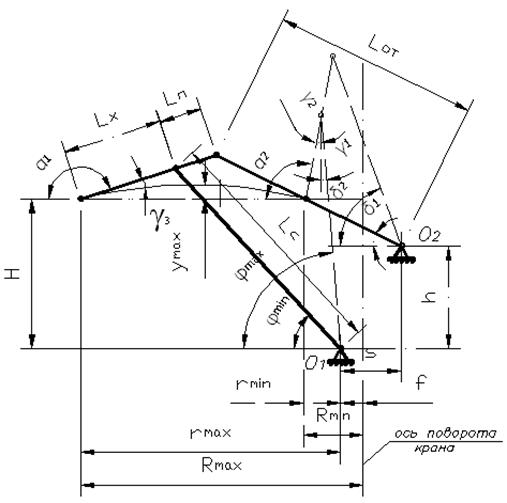
Рисунок 3.5 – Схема до пояснення заданих і визначальних параметрів стрілової системи.
Дата добавления: 2018-08-06; просмотров: 217; Мы поможем в написании вашей работы! |

Мы поможем в написании ваших работ!