Перечень используемого оборудования
Для проведения лабораторной работы используется персональный компьютер (ПЭВМ) с установленным программным пакетом MatlabSimulink.
Указания по порядку выполнения работы
Подготовить математическое описание и структурную схему тиристорного преобразователя.
Подготовить математическую модель и структурную схему регулируемого электропривода постоянного тока (пример на рис.10.1).
Составить схему модели неуправляемого выпрямителя в соответствии с вариантом задания (нулевая или мостовая).
Составить схему модели ЭП по системе «Тиристорный преобразователь – ДПТ НВ».
Рассчитать переходные процессы ДПТ НВ при питании якоря от управляемого выпрямителя при различных Uу.
Рассчитать переходные процессы наброса и сброса нагрузки (момент нагрузки номинальный).
Исследовать форму питающего напряжения и тока якоря при питании якоря ДПТ НВ от тиристорного преобразователя и сравнить их с графиками припитания якоря ДПТ от источника бесконечной мощности.
Сделать выводы.
Составить и защитить отчет.
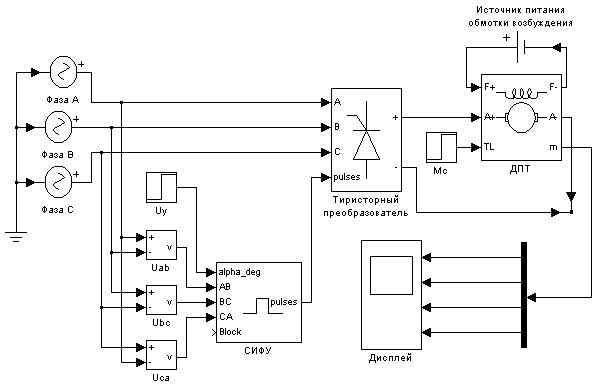
Рисунок 10.1 – Вариант модели ЭП по системе «тиристорный преобразователь – ДПТ НВ»
Указания по технике безопасности
1. К выполнению работ на ПЭВМ во время лабораторных занятий допускаются студенты, прошедшие инструктаж по технике безопасности. Студенты, допускающие нарушение инструкций техники безопасности (ТБ) и противопожарной безопасности (ПБ), немедленно удаляются из компьютерного класса (лаборатории).
|
|
|
2. В случае обнаружения неисправности компьютера сообщить об этом преподавателю.
3. После получения разрешения от преподавателя, включить ПЭВМ и приступить к работе.
4. После выполнения задания и получения разрешения от преподавателя, закрыть активные приложения, корректно завершить сеанс работы на ПЭВМ, отключить питание.
5. Привести в порядок рабочее место, и после получения разрешения преподавателя покинуть помещение.
Содержание отчета
Отчет должен содержать:
- Цель работы.
- Схему модели ЭП по системе «тиристорный преобразователь – ДПТ НВ».
- Графики переходных процессов пуска ДПТ НВ при питании от тиристорного выпрямителя (момент нагрузки равен 0).
- Графики переходных процессов наброса и сброса нагрузки (момент нагрузки равен Мном).
- Выводы по работе.
Контрольные вопросы
1.Какие математические модели существуют для описания тиристорного преобразователя постоянного тока? Охарактеризуйте критерии выбора той или иной модели.
2.Как выглядят частотные и временные характеристики ТП при ступенчатом управляющем и возмущающем воздействиях?
3.Как влияют электромагнитная и электромеханическая постоянные времени на динамические характеристики электропривода с одномассовой механической частью?
|
|
|
4.Как получить оптимальные условия демпфирования механических колебаний электроприводом?
5.Как отражаются на частотных и временных характеристиках условия оптимального демпфирования механических колебаний?
6.Учет звеньев чистого запаздывания при анализе устойчивости технических систем.
Список литературы, рекомендуемый к использованию по данной теме
1. ДьяконовВ.П. MATLAB 6/6.1/6.5+SIMULINK 4/5 в математике и моделировании: Полное руководство пользователя / В.П.Дьяконов. – М.: СОЛОН-Пресс, 2003. 576с.
2. Беспалов В.Я., Котелец Н.Ф. Электрические машины: учеб.пособие.- М.: Академия, 2012.
3. Белов Н. В. Электротехника и основы электроники: учебное пособие.- СПб.: Лань, 2012.
4. Онищенко Г.Б. Электрический привод: Учебник.- М.: Академия, 2006.
5. Электротехника: учебное пособие в трех книгах. Книга III. Электроприводы. Электроснабжение./ под ред. П. А. Бутырина. - Челябинск; Москва:ЮУрГУ,2005.
Лабораторная работа № 11Исследование регулировочных свойств ДПТ НВ в системе "Управляемый выпрямитель - двигатель"
Цель работы: приобрести практические навыки в управлении электроприводом (ЭП) постоянного тока независимого возбуждения в системе «Тиристорныйпреобразователь – Двигатель» (ТП-Д); получить экспериментальное подтверждение теоретическим сведениям о способах регулирования скорости ЭП и о работе системы ТП-Д.
|
|
|
Формируемые компетенции:способность рассчитывать режимы работы объектов профессиональной деятельности (ПК-6).
Теоретическая часть
К способам регулирования скорости ДПТ НВ относят:
1-й способ – изменением напряжения питания якорной цепи при неизменных значениях сопротивления якорной цепи и потока возбуждения, т.е. U = var при R = const и Ф = const;
2-й способ – изменением сопротивления якорной цепи при неизменности других параметров, т.е. R = var при U = const и Ф = const;
3-й способ – изменением потока тока возбуждения при неизменности других параметров, т.е. Ф = var при U = const и R = const;
В данной работе подлежит исследованию первый способ.
В системе ТП-Д по рис. 4.2 (см. лабораторную работу № 4) стенда АЭП-02 имеется возможность регулировать напряжение на выходе однополярного тиристорного преобразователя и ток возбуждения испытуемого двигателя (машина М3). Изменение напряжения питания и тока возбуждения допускается лишь в сторону уменьшения (относительно UНОМ, ФНОМ и IВ НОМ) во избежание перегрузки по напряжению (перегрева) ДПТ НВ и того, что магнитная система машин постоянного тока в номинальном режиме близка к насыщению.
|
|
|
Диапазон (иногда используется термин кратность) регулирования частоты изменением напряжения в системе ТП-Д (и «Генератор - Двигатель» (Г-Д)) достигает величиныД = ωНОМ/ ωМИН = 7:1, а изменением тока возбуждения обычно Д = ωМАКС/ ωМИН = 2:1 и ωМАКС> ω0е >ωНОМв режимах близких к холостому ходу. Таким образом, уменьшение U приводит к снижению ω за счет снижения ω0 на искусственной характеристике во всем диапазоне вращения вала двигателя, а уменьшение Ф (или IВ) ведет к возрастанию ω за счет возрастания ω0 при малых нагрузках, что следует из формулы ω0 = U / kФ – для скорости идеального холостого хода.
Дата добавления: 2018-08-06; просмотров: 377; Мы поможем в написании вашей работы! |

Мы поможем в написании ваших работ!