Перечень используемого оборудования
Для проведения лабораторной работы используется персональный компьютер (ПЭВМ) с установленным программным пакетом MatlabSimulink.
Указания по порядку выполнения работы
Изучить теоретический материал по математическому моделированию двигателя постоянного тока независимого возбуждения, по динамической механической характеристике ДПТ НВ и динамической жесткости.
Изучить возможности программных средств MATLAB+Simulink для моделирования режима динамического торможения ДПТ.
Выбрать двигатель постоянного тока независимого возбуждения (ДПТ НВ), руководствуясь данными таблицы 6.1.
Составить схему модели динамического торможения ДПТ с НВ (пример рис.8.4).
Рассчитать сопротивление динамического торможения, обеспечивающее двукратное ограничение тока якоря.
Снять временные характеристики скорости, тока и момента двигателя при динамическом торможении.
Сделать выводы по работе.
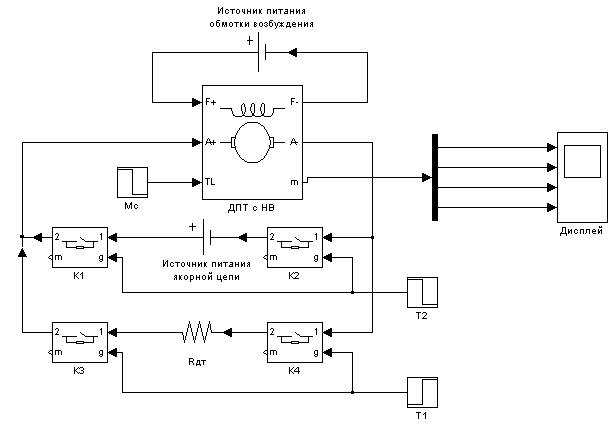
Рисунок 8.4 – Вариант модели ДПТ с НВ для исследования динамического торможения
Указания по технике безопасности
1. К выполнению работ на ПЭВМ во время лабораторных занятий допускаются студенты, прошедшие инструктаж по технике безопасности. Студенты, допускающие нарушение инструкций техники безопасности (ТБ) и противопожарной безопасности (ПБ), немедленно удаляются из компьютерного класса (лаборатории).
2. В случае обнаружения неисправности компьютера сообщить об этом преподавателю.
|
|
|
3. После получения разрешения от преподавателя, включить ПЭВМ и приступить к работе.
4. После выполнения задания и получения разрешения от преподавателя, закрыть активные приложения, корректно завершить сеанс работы на ПЭВМ, отключить питание.
5. Привести в порядок рабочее место, и после получения разрешения преподавателя покинуть помещение.
Содержание отчета
Отчет должен содержать:
Цель работы.
Исходные данные в соответствии с вариантом задания.
Схему модели ДПТ с НВ при динамическом торможении.
Расчеты сопротивления реостата динамического торможения.
Результаты расчета (требуемые графики функций и таблицы результатов расчета требуемых величин).
Выводы по работе.
Контрольные вопросы
1. Какие существуют режимы торможения ДПТ?
2. Понятие о динамической механической характеристике двигателя и ее назначении. Каким образом осуществляется ее построение?
3. Как влияют параметры цепи якоря на динамическую механическую характеристику?
4. Понятие о динамической жесткости механической характеристики и ее назначении.
5. Как влияют параметры цепи якоря на динамическую жесткость механической характеристики ДПТ НВ?
|
|
|
Список литературы, рекомендуемый к использованию по данной теме
1. ДьяконовВ.П. MATLAB 6/6.1/6.5+SIMULINK 4/5 в математике и моделировании: Полное руководство пользователя / В.П.Дьяконов. – М.: СОЛОН-Пресс, 2003. 576с.
2. Беспалов В.Я., Котелец Н.Ф. Электрические машины: учеб.пособие.- М.: Академия, 2012.
3. Белов Н. В. Электротехника и основы электроники: учебное пособие.- СПб.: Лань, 2012.
4. Онищенко Г.Б. Электрический привод: Учебник.- М.: Академия, 2006.
5. Электротехника: учебное пособие в трех книгах. Книга III. Электроприводы. Электроснабжение./ под ред. П. А. Бутырина. - Челябинск; Москва: ЮУрГУ, 2005.
Лабораторная работа № 9 Исследование режима торможения противовключением электропривода постоянного тока
Цель работы: исследование механических характеристик двигателя постоянного тока независимого возбуждения в режиме торможения противовключением; выявление влияния параметров пускового реостата и нагрузки на динамические характеристики двигателя.
Формируемые компетенции:способность рассчитывать режимы работы объектов профессиональной деятельности (ПК-6).
Теоретическая часть
Торможение противовключениемосуществляется путем перемены полярности напряжения на якоре. Схема ЭД приведена на рисунке 9.1.
|
|
|
Рисунок9.1 – Схема ЭД при реализации торможения противовключением путем перемены полярности напряжения на якоре
Для включения ЭД в двигательный режим необходимо включить контакты контактора КМ1. Для получения торможения противовключением необходимо отключить контакты КМ1 и включить контакты контактора КМ2. В результате таких переключений поменяется полярность напряжения на якоре, изменится направление тока в якоре, и ЭД будет тормозиться.
Для ограничения тормозного тока на время торможения ЭД включают в цепь якоря сопротивление Rд и так называемое сопротивление противовключенияRпр:
 , (9.1)
, (9.1)
Тормозной ток определяется по выражению:
 . (9.2)
. (9.2)
Тормозные характеристики приведены на рисунке 9.2 (второй квадрант).
Рисунок9.2 – Тормозные характеристики ЭД при торможении противовключением
При скорости  ЭД отключают от сети. Если требуется осуществить реверс ЭД, то при скорости необходимо отключить сопротивление Rпр. Тогда двигатель начнется вращаться в противоположную сторону (третий квадрант).
ЭД отключают от сети. Если требуется осуществить реверс ЭД, то при скорости необходимо отключить сопротивление Rпр. Тогда двигатель начнется вращаться в противоположную сторону (третий квадрант).
Торможение противовключением за счет действия активного момента сопротивления Мса возможен если при подъеме груза ввести в цепь якоря сопротивление Rд и Rпр, то сформируется механическая характеристика, на которой все моменты двигателя (в том числе и при нулевой скорости) будут меньше Мс. Под действием момента сопротивления якорь выворачивается в обратную сторону. В результате в режиме противовключения осуществляется спуск груза на малой (ползучей) скорости (  ). Механическая характеристика приведена на рис.9.2 пунктиром.
). Механическая характеристика приведена на рис.9.2 пунктиром.
|
|
|
Дата добавления: 2018-08-06; просмотров: 296; Мы поможем в написании вашей работы! |

Мы поможем в написании ваших работ!