Перечень используемого оборудования
Для проведения лабораторной работы используется персональный компьютер (ПЭВМ) с установленным программным пакетом MatlabSimulink.
Указания по порядку выполнения работы
Изучить возможности и правила работы с комплектом программных средств MATLAB+Simulink для моделирования двигателей постоянного тока.
Выбрать двигатель постоянного тока независимого возбуждения (ДПТ НВ), руководствуясь данными таблицы 6.1.
Для выбранного двигателя рассчитать значения пускового реостата.
Провести моделирование процесса реостатного пуска ДПТ.
Снять временные характеристики скорости, тока и момента двигателя.
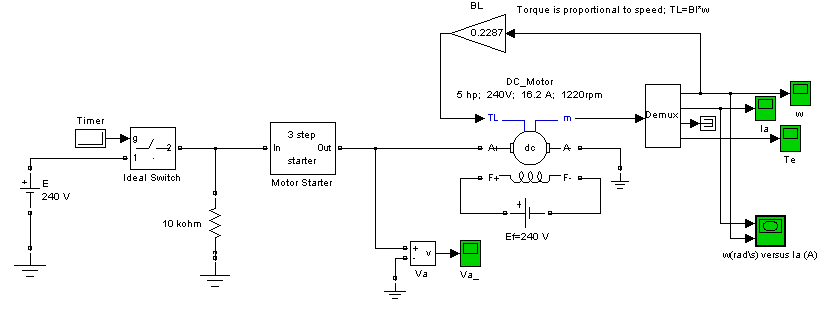
Рисунок 7.3 – Вариант модели ДПТ с НВ для исследования переходных процессов при реостатном пуске
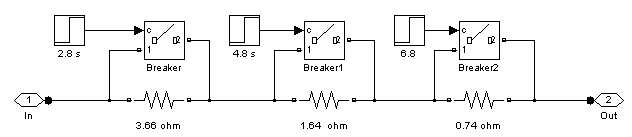
Рисунок 7.4 – Вариант модели пускового реостата
Указания по технике безопасности
1. К выполнению работ на ПЭВМ во время лабораторных занятий допускаются студенты, прошедшие инструктаж по технике безопасности. Студенты, допускающие нарушение инструкций техники безопасности (ТБ) и противопожарной безопасности (ПБ), немедленно удаляются из компьютерного класса (лаборатории).
2. В случае обнаружения неисправности компьютера сообщить об этом преподавателю.
3. После получения разрешения от преподавателя, включить ПЭВМ и приступить к работе.
4. После выполнения задания и получения разрешения от преподавателя, закрыть активные приложения, корректно завершить сеанс работы на ПЭВМ, отключить питание.
|
|
|
5. Привести в порядок рабочее место, и после получения разрешения преподавателя покинуть помещение.
Содержание отчета
Отчет должен содержать:
Цель работы.
Исходные данные в соответствии с вариантом задания.
Схему модели ДПТ с НВ при реостатном пуске.
Результаты расчета (требуемые графики функций и таблицы результатов расчета требуемых величин).
Выводы по работе.
Контрольные вопросы
1. Физический смысл частотных и временных характеристик.
2. Охарактеризуйте каналы управления ДПТ НВ на основе полной структурной схемы двигателя и при Ф=const.
3. Понятие о динамической механической характеристике двигателя и ее назначении. Каким образом осуществляется ее построение?
4. Как влияют параметры цепи якоря на динамическую механическую характеристику?
5. Понятие о динамической жесткости механической характеристики и ее назначении.
6. Как влияют параметры цепи якоря на динамическую жесткость механической характеристики ДПТ НВ?
Список литературы, рекомендуемый к использованию по данной теме
1. Дьяконов,В.П. MATLAB 6/6.1/6.5+SIMULINK 4/5 в математике и моделировании: Полное руководство пользователя / В.П.Дьяконов. – М.: СОЛОН-Пресс, 2003. 576с.
|
|
|
2. Беспалов В.Я., Котелец Н.Ф. Электрические машины: учеб.пособие.- М.: Академия, 2012.
3. Белов Н. В. Электротехника и основы электроники: учебное пособие.- СПб.: Лань, 2012.
4. Онищенко Г.Б. Электрический привод: Учебник.- М.: Академия, 2006.
5. Электротехника: учебное пособие в трех книгах. Книга III. Электроприводы. Электроснабжение./ под ред. П. А. Бутырина. - Челябинск; Москва: ЮУрГУ, 2005.
Лабораторная работа № 8Исследование режима динамического торможения электропривода постоянного тока
Цель работы: исследование механических характеристик двигателя постоянного тока независимого возбуждения в режиме динамического торможения; выявление влияния параметров пускового реостата и нагрузки на динамические характеристики двигателя.
Формируемые компетенции:способность рассчитывать режимы работы объектов профессиональной деятельности (ПК-6).
Теоретическая часть
ЭД может работать в трех тормозных режимах – генераторном (рекуперативном), динамического торможения и в режиме противовключения.
Генераторный (рекуперативный) режим можно получить, если уменьшить напряжение на якоре (Uя <Uян). При этом скорость якоря  будет больше скорости
будет больше скорости  . Схема ЭД будет такая же, как и в двигательном режиме. Сначала ЭД тормозится, отдавая энергию в сеть, затем он переходит работать в двигательный режим, но с меньшей скоростью (рис. 8.1).
. Схема ЭД будет такая же, как и в двигательном режиме. Сначала ЭД тормозится, отдавая энергию в сеть, затем он переходит работать в двигательный режим, но с меньшей скоростью (рис. 8.1).
|
|
|
Рисунок 8.1 – Характеристики двигательного и рекуперативного режима торможения ЭД
Для динамический торможения необходимо у работающего ЭД якорь замкнуть на тормозное сопротивлениеRт, а обмотку возбуждения оставить подключенной к источнику питания (рис. 8.2).
Рисунок 8.2 – Схема ЭД в динамическом режиме торможения
Сопротивление Rт включено для ограничения начального тормозного тока до величины Iт.нач = 2,5Iян: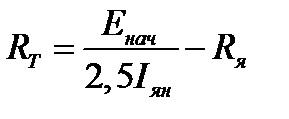 .
.
Тормозная характеристика приведена на рисунке 8.3 (второй квадрант).
Рисунок 8.3 – Тормозная характеристика ЭД в динамическом режиме торможения
Дата добавления: 2018-08-06; просмотров: 357; Мы поможем в написании вашей работы! |

Мы поможем в написании ваших работ!