ИССЛЕДОВАНИЕ АСИНХРОННОГО ЭЛЕКТРОДВИГАТЕЛЯ
С КОРОТКОЗАМКНУТЫМ РОТОРОМ
Цель работы. Исследовать рабочие свойства асинхронного двигателя.
Задачи работы:
1. Изучить схемы для исследования асинхронного электродвигателя с короткозамкнутым ротором (в дальнейшем АД).
2. Снять естественную механическую характеристику.
3. Снять рабочие характеристики двигателя по методу непосредственной нагрузки.
4. Провести обработку экспериментальных данных, составить отчет и сделать заключение по работе.
Подготовка к работе:
1. Пройти инструктаж по технике безопасности на рабочем месте.
2. Ознакомиться с описанием работы.
3. Выполнить практическую часть лабораторной работы: изучить имеющееся оборудование, собрать схему, провести необходимые исследования.
Приборы и принадлежности:модуль питания стенда (МПС), модуль питания (МП), силовой модуль (СМ), модуль преобразователя частоты (ПЧ), модуль тиристорного преобразователя (ТП), модуль измерительный (МИ).
Краткие теоретические сведения
Асинхронный двигатель – это двигатель переменного тока, у которого частота вращения ротора меньше частоты вращения магнитного поля и зависит от нагрузки на валу.
Асинхронный двигатель состоит из двух основных частей: неподвижного статора и вращающегося ротора.
Сердечник статора и ротора, разделенные небольшим воздушным зазором (0,3÷1,0 мм), составляют магнитную цепь машины. Для уменьшения потерь на гистерезис и вихревые токи сердечники статора и ротора набираются из штампованных листов электротехнической стали толщиной 0,5 мм, изолированных друг от друга слоем лака или окалины. В пазы, расположенные на внутренней поверхности статора, укладывается трехфазная обмотка из изолированного медного провода. Каждая фаза обмотки занимает 1/3 пазов статора. Таким образом, все три фазы А, В, С обмотки статора смещены в пространстве под углом 120º друг относительно друга. Обмотка соединяется по схеме «звезда» или «треугольник». Выбор схемы соединения обмотки статора зависит от линейного напряжения сети и паспортных данных двигателя. При питании такой системы обмоток трехфазным переменным током в статоре создается вращающееся магнитное поле. Обмотка короткозамкнутого ротора выполняется из медных или алюминиевых стержней, запрессованных в пазы ротора. По торцам стержни привариваются к кольцам из того же материала. В целом обмотка образует металлическую клетку, напоминающую «беличье колесо». В настоящее время у всех двигателей мощностью до 100 кВт «беличье колесо» делается из алюминия путем его заливки под давлением в пазы ротора. При включении в трехфазную сеть обмоток статора трехфазного асинхронного двигателя (ТАД) токи статора создают вращающееся магнитное поле с частотой вращения:
|
|
|
 [об/мин],
[об/мин],
|
|
|
где f – частота переменного тока в Гц, p − число пар полюсов (зависит от числа катушек обмотки статора), а коэффициент 60 появился из-за того, что n1 принято измерять в оборотах в минуту.
Силовые линии этого поля пересекают обмотку ротора, и в ней по закону электромагнитной индукции наводится ЭДС, и по обмотке протекают токи. Взаимодействие вращающегося магнитного поля и токов ротора создает вращающий момент, увлекающий ротор за вращающимся магнитным полем. Если этот момент достаточно велик, то ротор приходит во вращение, и его установившаяся частота вращения n2 соответствует равенству вращающего момента Mвр тормозному Mт, приложенному к валу от приводимого во вращение механизма, и внутренних сил трения.
Частота вращения ротора 2 n всегда несколько меньше частоты магнитного поля машины и зависит от нагрузки на валу.
Относительную разность частот вращения магнитного поля и ротора называют скольжением:
Направление вращения ротора определяется направлением вращения магнитного поля. Чтобы изменить направление вращения ротора двигателя, необходимо изменить порядок чередования фаз путем переключения любых двух фаз обмотки статора.
|
|
|
Под рабочими характеристиками двигателя понимают зависимости мощности, потребляемой двигателем Р1 = Рд , потребляемого тока обмотки статора I1 = Iд, коэффициента мощности cosφ1 , частоты вращения двигателя n2, КПД η и вращающего момента M от полезной мощности двигателя, отдаваемой на валу P2 . Эти характеристики определяют основные эксплуатационные свойства асинхронного двигателя и снимаются при номинальных частоте сети f = fном и напряжении на зажимах статора U1 = Uном .
Порядок выполнения работы
1. Перед проведением лабораторной работы необходимо привести модули в исходное состояние:
- переключатель SA1 МДС1 установить в положение «∞»;
- кнопку «Сеть» модуля ТП перевести в нижнее положение, переключатель SA6 – в нижнее положение. ТП должен быть переведен в режим регулирования по моменту (приложение Д).
Исследуемый асинхронный двигатель входит в состав электромашинного агрегата, включающего в себя собственно исследуемый двигатель М1, нагрузочный генератор – машину постоянного тока – М2 и импульсный датчик скорости М3.
Схема исследования асинхронного двигателя представлена на рис. 1. АД подключается непосредственно к ПЧ. Якорная цепь двигателя постоянного тока подключается к регулируемому источнику постоянного Uтп тока модуля ТП. Обмотка возбуждения двигателя постоянного тока подключается к нерегулируемому источнику постоянного тока Uов модуля ТП.
|
|
|
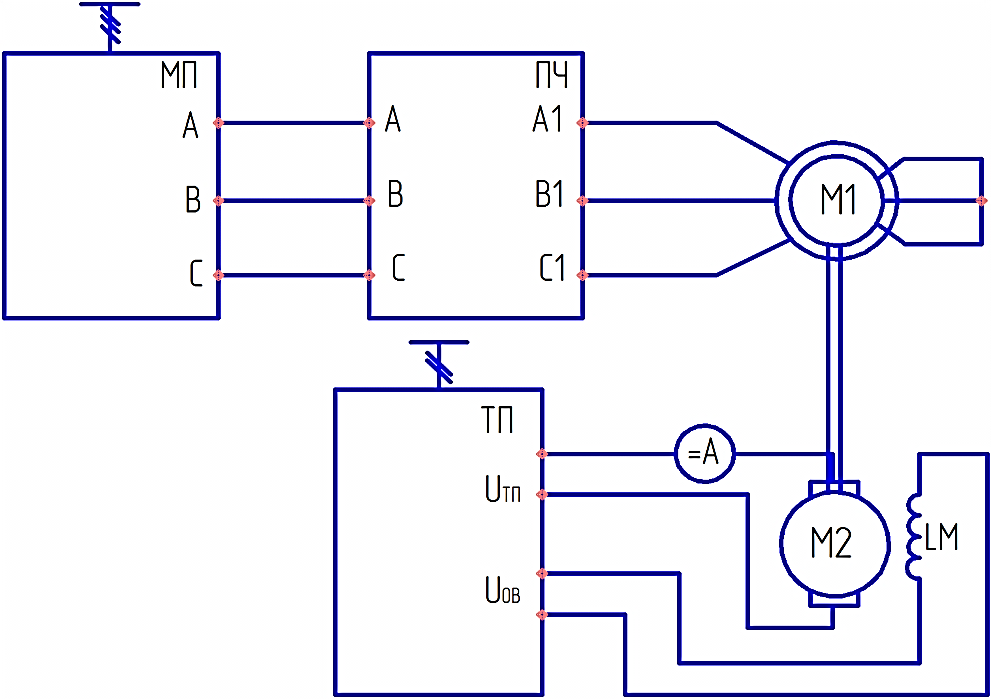
Рисунок 1 – Схема для исследования асинхронного двигателя
Для измерения частоты выходного напряжения статора, мощности двигателя и момента асинхронного двигателя используется преобразователь частоты.
Измерение тока статора, тока якоря и напряжения на якоре осуществляется модулем ТП.
Текущее значение частоты вращения агрегата наблюдать на индикаторе СМ.
2. Снять естественную механическую характеристику АД.
Естественная механическая характеристика асинхронного электродвигателя представляет собой зависимость скорости от момента нагрузки при номинальных значениях напряжения и частоты: n = f (MH) при Uc = UH = const, f = fH = const.
Опыт проводится в следующей последовательности:
- включить автоматические выключатели QF1, QF2 МПС и МП;
- настроить ПЧ на режим регулирования скорости (Приложение Д);
- подать питание на ТП нажатием кнопки «Сеть»;
- тумблером SA1 модуля ПЧ выбрать направление вращения двигателя;
- потенциометром RP1 задать номинальную частоту 50Гц, занести первое измерение в табл. 1;
- подать разрешение на работу ТП, выбрать необходимое направление вращения;
- задавать потенциометром RP1 модуля момент нагрузки, фиксируя показания в табл. 1. Значение тока статора наблюдать на экране ПЧ.
Таблица 1 – Результаты измерений и вычислений
| IЯ, А | |||||||
| UЯ, В | |||||||
| IC, A | |||||||
| n, об/мин | |||||||
| ω, рад/с | |||||||
| M, H∙м | |||||||
| s |
3. После проведения опыта снять нагрузку (RP1 модуля ТП установить в крайнее положение против часовой стрелки, SA6 – в нижнее положение). Тумблер SA1 модуля ПЧ установить в среднее положение.
4. Рассчитать данные:
- электромагнитный момент ГПТ, Н∙м:
Мэм = СМ ∙ Iя,
где См – принимается из тарировочной кривой, См = f (ω) (Приложение В);
- момент холостого хода ГПТ, Н∙м:
Мо = См ∙ Iяо,
где Iяо – ток холостого хода (принимается из тарировочной кривой машины постоянного тока (Приложение В) и пропорционален механическим потерям и потерям в стали ГПТ);
- момент на валу электродвигателя, Н∙м:
Мв = Мэм + М0;
- угловая частота вращения, рад/с:
 ;
;
- скольжение:
 ,
,
где ⍵0 – синхронная угловая частота вращения, рад/с:
 ,
,
где n0 – синхронная частота вращения, об/мин.
5. По данным таблицы 1 построить характеристики n = f(MB), n = f(IC).
6. Снять искусственную механическую характеристику АД при изменении напряжения статора.
Искусственная механическая характеристика асинхронного электродвигателя представляет собой зависимость скорости от момента нагрузки при неноминальном значении напряжения статора и номинальной частоте: n = f (MH) при Uc ≠ UH = const, f = fH = const.
Для изменения напряжения статора при частоте 50 Гц установить в параметре ПЧ Е1-05 значение 220 В.
Опыт проводится в той же последовательности, как и при снятии естественной механической характеристики. Данные опыта заносятся в таблицу, аналогичную таблице 1.
7. Снять рабочие характеристики.
Рабочие характеристики представляют собой графически изображенные зависимости тока статора, потребляемой из сети активной мощности, частоты вращения, скольжения, электромагнитного момента, КПД и коэффициента мощности от полезной мощности на валу двигателя:
I1, P1, n, s, МЭМ, η, cosφ1 = f (P2).
Опыт проводится в той же последовательности, что и предыдущие. Необходимо установить напряжение статора 380 В (Е1-0,5=380).
Опытные данные со стороны, как АД, так и со стороны генератора, занести в таблицу 2, таблицу 3.
Линейное напряжение на статоре принять равным 380 В.
Таблица 2 – Данные со стороны ДПТ
| IЯ, А | ||||||
| UЯ, В | ||||||
| CM | ||||||
| MЭМ, Н∙м | ||||||
| IЯ0, А | ||||||
| M0, Н∙м | ||||||
| M2, Н∙м | ||||||
| P2, Вт |
Таблица 3 – Данные со стороны асинхронного двигателя
| f, Гц | |||||||
| I1Ф, А | |||||||
| n, об/мин | |||||||
| U1, В | |||||||
| cos φ1 | |||||||
| P1, Вт | |||||||
| ∆Pэл1, Вт | |||||||
| ∆Pст, Вт | |||||||
| Pэм, Вт |
Продолжение таблицы 3
| S | |||||||
| ∆Pмех, Вт | |||||||
| ∑∆P, Вт | |||||||
| Pв, Вт | |||||||
| Mэм, H∙м | |||||||
| η, % |
После проведения опыта установить модули в исходное положение.
8. Рассчитать данные со стороны машины постоянного тока.
Электромагнитный момент ГПТ, Н∙м:
МЭМ.ГПТ = СМ∙IЯ,
где СМ − принимается из таритовочной кривой, CM = f (ω) (Приложение В).
Момент холостого хода ГПТ, Н∙м
M0 = CM ∙ IЯ0,
где IЯ0 − ток холостого хода; принимается из таритовочной кривой машины постоянного тока (Приложение В) и пропорционален механическим потерям и потерям в стали ГПТ, А.
Полный момент на валу ГПТ:
М2ГПТ = МЭМ.ГПТ + М0;
Полезная мощность на валу ГПТ, Вт:
Р2 = М2ГПТ ∙ ω.
9. Рассчитать данные со стороны асинхронного двигателя.
Полезная мощность на валу асинхронного двигателя равняется мощности на валу ГПТ:
РВ = Р2.
Электромагнитная мощность асинхронного двигателя, Вт:
РЭМ = РВ + ∆РМЕХ.АД,
где ∆РМЕХ.АД – механические потери асинхронного двигателя, Вт:
∆РЭЛ1 = m1 ∙ I21ф ∙ r1,
где r1 − активное сопротивление фазы статора (Приложение Б), Ом.
Потери в стали при напряжении Uф, Вт:
 ,
,
где ∆Рст1 − потери в стали сердечника статора при номинальном напряжении (Приложение Б), Вт;
U1н − номинальное фазное напряжение, В;
Uф − фазное напряжение электродвигателя, В:
Выходная мощность преобразователя частоты (мощность, потребляемая двигателем), Вт:
Р1 = Рэл + ∆Рст + ∆Рэл.1.
Скольжение:
 ,
,
где ω − текущая угловая частота вращения. рад/с;
n − текущее значение частоты вращения. об/мин;
ω0 − синхронная угловая частота вращения. рад/с;
n0 − синхронная частота вращения. об/мин;
∑∆Р − суммарные потери в двигателе, Вт:
∑∆Р = Рэл.1 + ∆Рст + ∆Рмех.ад∙
Электромагнитный момент асинхронного двигателя, Н∙м:
Полезный момент на валу двигателя, Н∙м:
М2 = Мэм –М0.
Полезная мощность на валу двигателя, Вт
Р2 = Р1 – ∑∆Р.
Коэффициент полезного действия, %:
Коэффициент мощности:
 .
.
10. По данным табл.2 построить характеристики: I1, P1, n, s, Mэс, η, cosφ1 = f (PB) при f1 = const и U1 = const.
Контрольные вопросы
1. Как изменится напряжение вращения асинхронного двигателя?
2. Как изменится момент асинхронного двигателя при понижении напряжения питающей сети?
3. Может ли асинхронный двигатель создавать момент при синхронной частоте вращения, т.е. может ли он вращаться с синхронной частотой вращения?
4. Как изменится ток статора двигателя при повышении напряжения и неизменной нагрузке на валу двигателя?
5. Объяснить физический смысл зависимости cosφ1 = f (PB).
ЛАБОРАТОРНАЯ РАБОТА № 5.
Дата добавления: 2018-06-27; просмотров: 3297; Мы поможем в написании вашей работы! |

Мы поможем в написании ваших работ!