ИССЛЕДОВАНИЕ ЭЛЕКТРОДВИГАТЕЛЯ ПОСТОЯННОГО ТОКА
НЕЗАВИСИМОГО ВОЗБУЖДЕНИЯ
Цель работы.Ознакомиться со способами пуска двигателя независимого возбуждения, исследовать механические, рабочие и регулировочные свойства двигателя.
Задачи работы:
- изучить схему для экспериментального исследования электродвигателя постоянного тока независимого возбуждения (в дальнейшем изложении ДПТНВ), состав и назначение модулей, используемых в работе;
- собрать схему для экспериментального исследования ДПТНВ. Провести пробное включение;
- снять естественную механическую характеристику;
- снять искусственную механическую характеристику при введении сопротивления в цепь якоря;
- снять искусственную механическую характеристику при ослаблении магнитного потока;
- снять искусственную механическую характеристику при пониженном напряжении якорной цепи;
- снять рабочие характеристики ДПТНВ;
- снять регулировочные характеристики двигателя при изменении напряжения, подводимого к зажимам двигателя;
- снять регулировочные характеристики двигателя посредством ослабления магнитного потока;
- провести обработку экспериментальных данных, составить отчет и сделать заключение по работе.
Подготовка к работе:
1. Пройти инструктаж по технике безопасности на рабочем месте.
2. Ознакомиться с описанием работы.
3. Выполнить практическую часть лабораторной работы: изучить имеющееся оборудование, собрать схему, провести необходимые исследования.
|
|
|
Приборы и принадлежности:модуль питания стенда (МПС), модуль питания (МП), модуль тиристорного преобразователя (ТП), силовой модуль (СМ), модуль добавочных сопротивлений № 1 (МДС1), модуль добавочных сопротивлений № 2 (МДС2), модуль измерительный (МИ).
Краткие теоретические сведения
Как уже говорилось ранее в моей предыдущей статье, двигатели постоянного тока применяются в различных промышленных, транспортных системах, в которых необходимо осуществлять плавное регулирование скорости вращения или выдерживать постоянство момента (прокатные станы, лифты, металлорежущие станки).
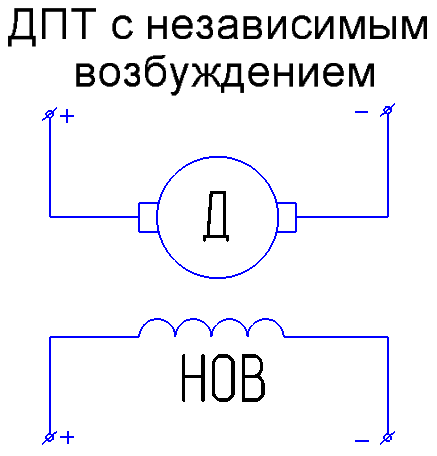
Рисунок 1 – Схема двигателя постоянного тока
с независимым возбуждением
Частота вращения двигателя постоянного тока с независимым возбуждением описывается формулой ниже. Это выражение является электромеханической характеристикой ДПТ:
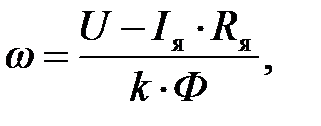
где U – питающее напряжение сети; Iя – ток протекающий в якорной обмотке; Rя – сопротивление якорной цепи; k – конструктивный коэффициент; Ф – магнитный поток.
Если подставить формулу момента в выражение частоты вращения, то мы получим электромеханическую характеристику, выраженную через момент:
|
|
|
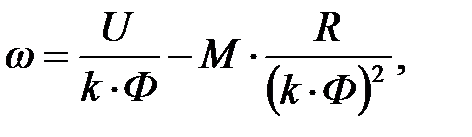
Данное уравнение механической характеристики определяет зависимость скорости вращения двигателя к моменту на его валу. Если рассматривать момент в статике, то он будет равен моменту сопротивления Мс. Соответственно, уравнение определяет зависимость скорости вращения двигателя от момента сопротивления Мс.
При прямом пуске двигателя, пусковой ток значительно больше номинального Iп >> Iн, поэтому якорная обмотка начинает сильно греться и может выйти из строя. Кроме того, большие пусковые токи крайне негативно влияют на щеточно-коллекторный узел. Поэтому, начальный ток обычно ограничивают введением добавочного сопротивления в якорную цепь двигателя. Величина максимального превышения пускового тока от номинального может достигать от 2 до 5 раз Iп = (2…5)∙Iн, в зависимости от конструкции и типа ДПТ.
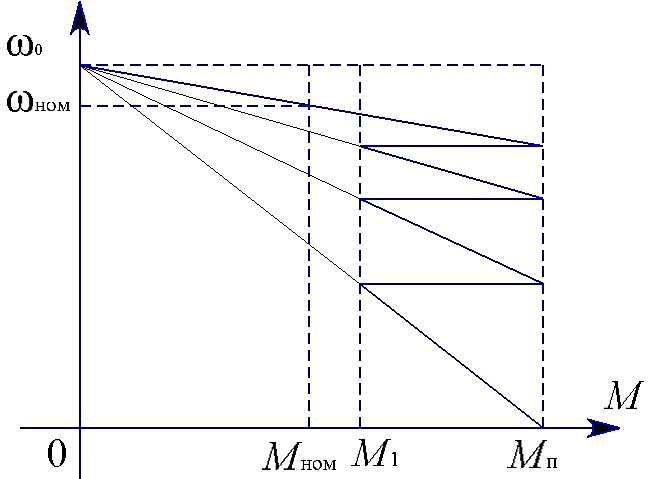
Рисунок 2 – Реостатный пуск двигателя постоянного тока
Как Вы могли заметить, пуск происходит в несколько ступеней – это необходимо для более плавного разгона. Наклон механической характеристики зависит от величины добавочного сопротивления, и чем оно больше, тем наклон круче. То есть характеристика становится более жесткой.
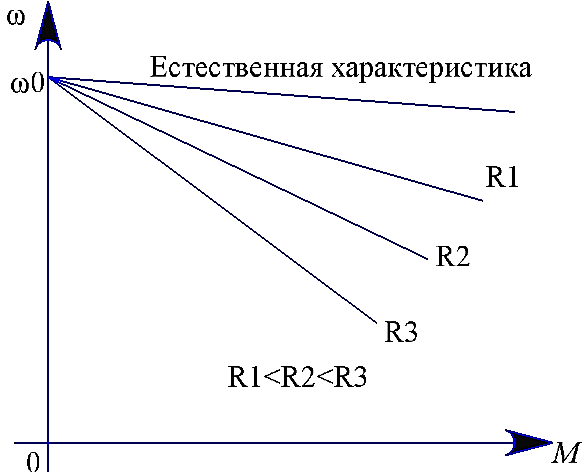
Рисунок 3 – Зависимость наклона мех. характеристики
|
|
|
двигателя постоянного тока от добавочного сопротивления
Так же регулирование частоты вращения двигателя может осуществляться понижением питающего напряжения.
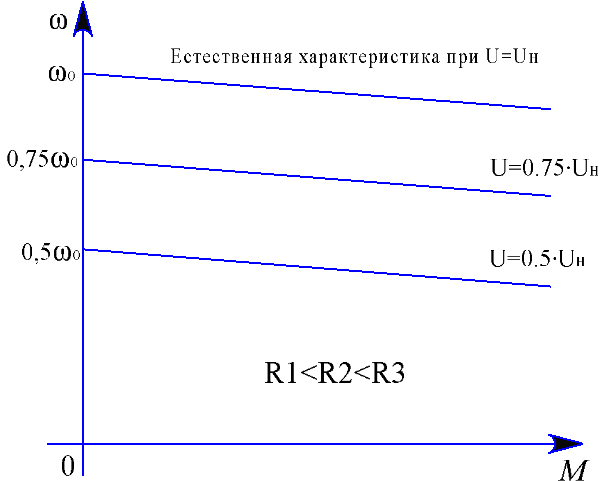
Рисунок 4 – Зависимость частоты вращения двигателя постоянного тока
от питающего напряжения
Отличительная особенностью двигателей постоянного тока от АД – это возможность регулирования скорости вверх от основной, изменением магнитного потока. Однако экономически выгодно регулировать частоту вращения тогда, когда ток якоря является номинальным. Значения моментов будут различными для разных величин магнитного потока Ф. Такие точки значений номинальных моментов будут располагаться на пунктирной гиперболической кривой (рисунок 6).
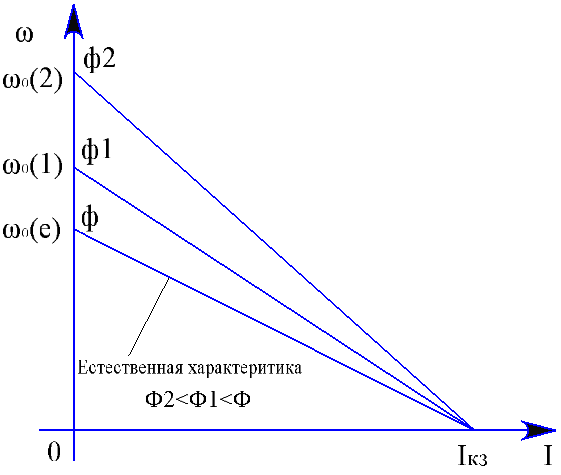
Рисунок 5 – Регулирование скорости вращения двигателя постоянного тока
с независимым возбуждением изменением магнитного потока
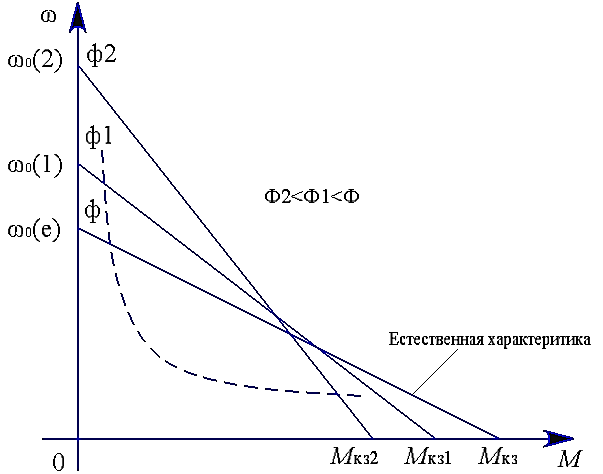
Рисунок 6 – Изменение магнитного потока с сохранением
оптимальных номинальных параметров
Генераторный режим ДПТ НВ разделяют на: рекуперативное торможение (с отдачей энергии в сеть); динамическое торможение; торможение противовключением.
Порядок выполнения работы
1. Перед проведением лабораторной работы необходимо привести модули в исходное состояние. Для этого:
|
|
|
- кнопку «Сеть» модуля ТП переведите в нижнее положение, переключатель SA6 в нижнее положение. ТП должен быть переведен в режим регулирования скорости (Приложение Е);
- переключит SA1 МДС1 установить в положение «∞»;
- переключить SA1, SA2 МДС2 установить в положение «0».
Исследуемая машина постоянного тока входит в состав электромашинного агрегата, включающего в себя собственного исследуемую машину постоянного тока М2, нагрузочную машину – машину переменного тока – М1 и импульсного датчика скорости М3.
Схема для исследования двигателя постоянного тока независимого возбуждения, представлена на рисунке 7. Внимательно изучите ее.
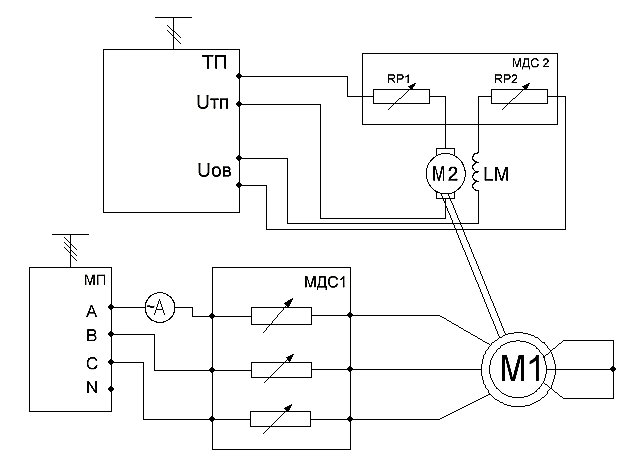
Рисунок 7 – Схема для исследования двигателя независимого возбуждения
Якорная цепь ДТП через добавочные сопротивления RP1 модуля МДС2 и датчика тока и напряжения подключается к выходу UТП тиристорного преобразователя Обмоток возбуждения через добавочное сопротивление RP2 модуля МДС2 переключается к нерегулируемому источнику постоянного тока UОВ модуля ТП.
Асинхронный двигатель подключается через добавочные сопротивления (МДС1) непосредственно к сети (МП).
Контроль параметров двигатель постоянного тока осуществляется с помощью модуля ТП.
Ток статора Iс измеряется с помощью амперметра модуля МИ.
Соберите схему (рис. 7) и предоставьте на проверку преподавателю.
2. Определите направления вращения двигателей. Для этого необходимо:
- включить автоматы QF1 и QF2 модулей МПС и МП соответственно;
- подать разрешение на работу ТП (SA6) и, выбрав направление вращения, задать потенциометром RP1 напряжение 200 В, запомнить направление вращения двигателя;
- вывести RP1 модуля ТП в крайнее положение против часовой стрелки, снять разрешение на работу ТП (SA6);
- вывести сопротивление из статорной цепи АДКЗ, запустить двигатель, запомнить направление вращения. Оно должно быть противоположным направлению вращения ДПТ. Если это не так, переключатель SA1 модуля МДС1 перевести в положение «∞», поменять на силовом модуле фазы «А» и «В» и проверить направление вращения.
3. Снимите естественную механическую характеристику ДПТНВ. Она представляет собой зависимость скорости от момента нагрузки при постоянном значении напряжения на зажимах двигателя и отсутствии дополнительного сопротивления в цепи якоря: n = f (MH) при UЯ = const, iB = const и RДЯ = 0.
Опыт проводится в следующей последовательности:
- включить автоматы QF1 и QF2 модулей МПС и МП соответственно;
- подать разрешение на работу ТП (SA6) и, задав направление вращения, потенциометром RP1 установить напряжение 200В;
- переключателем SA1 модуля МДС1 вводить сопротивления, тем самым, нагружая ДПТ до тех пор, пока ток якоря не достигнет 1,5А или ток статора не достигнет IС = IН.
Данные опыта занести в таблицу 1.
Таблица 1 – данные опыта
| n, об/мин | ||||
| IЯ, А | ||||
| М, Н∙м |
После проведения опыта установить все переключатели модулей в исходное состояние.
4. Рассчитайте данные и полученные значения занесите в таблицу 1:
- момент на валу двигателя,Н∙м:
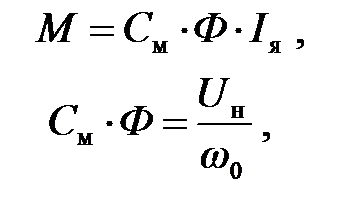
где  – номинальное напряжение ДПТ (Приложение Б);
– номинальное напряжение ДПТ (Приложение Б);
 – синхронная частота вращения ДПТ (Приложение Б).
– синхронная частота вращения ДПТ (Приложение Б).
По данным таблицы 1 построить характеристики n = f (MH), n = f (IЯ).
5. Снимите искусственную механическую характеристику ДПТНВ при введении сопротивления в цепь якоря. Она представляет собой зависимость скорости от момента нагрузки при постоянном значения на зажимах двигателя и введении дополнительного сопротивления в цепь якоря: n = f (MH) при Uя = const, iB = const.
Опыт проводится в следующей последовательности:
- включите автоматы QF1 и QF2 модулей МПС и МП соответственно;
- переключатель SA1 модуля МДС2 установите в положение отличное от нуля, произведите первое измерение;
- подайте разрешение на работу ТП (SA6) и, задав направление вращения, потенциометром RP1 установить напряжение 200 В;
- переключателем SA1 модуля МДС1 вводите сопротивления, тем самым, нагружая ДПТ до тех пор, пока ток якоря не достигнет 1,5 А или ток статора не достигнет IС = IН. Данные занести в таблицу 2.
Таблица 2 – Результаты измерений и вычислений
| RДЯ = | ||||
| n, об/мин | ||||
| IЯ, А | ||||
| М, Н∙м | ||||
После проведения опыта установите все переключатели модулей в исходное состояние.
По данным таблицы 2 построить характеристики n = f (MH), n = f (IЯ).
4. Снимите искусственную механическую характеристику двигателя независимого возбуждения. Она представляет собой зависимость скорости от момента нагрузки при постоянном значении напряжения на зажимах двигателя и ведение дополнительное сопротивление цепи обмотки возбуждения: n = f (MH) при Uя = const, iB = const.
Опыт проводится в следующей последовательности:
- включить автоматы QF1 и QF2 модулей МПС и МП соответственно;
- подать разрешение на работу ТП (SA6) и, задав направление вращения, потенциометром RP1 установить напряжение 200 В;
- переключатель SA2 модуля МДС2 установить в положение отличное от нуля, произвести первое измерение;
- переключателем SA1 модуля МДС1 вводить сопротивления, тем самым, нагружая ДПТ до тех пор, пока ток якоря не достигнет 1,5 А или ток статора не достигнет IС = IН.
Данные опыта занести в таблицу 3.
Таблица 3 – Результаты измерений и вычислений
| RДВ = | ||||
| n, об/мин | ||||
| IЯ, А | ||||
| М, Н∙м | ||||
После проведения опыта установите все переключатели модулей в исходное состояние.
По данным таблицы 3 построить характеристики n = f (MH), n = f (IЯ).
5. Снимите искусственную механическую характеристику двигателя независимого возбуждения при пониженном напряжении. Она снимается при пониженном напряжении якорной цепи и номинальном потоке возбуждения машины.
Опыт проводится в следующей последовательности: n = f (MH) при Uя = const, iB = const.
- включите автоматы QF1 и QF2 модулей МПС и МП соответственно;
- подайте разрешение на работу ТП (SA6) и, задав направление вращения, потенциометром RP1 установите напряжение по указанию преподавателя;
- переключателем SA1 модуля МДС1 вводите сопротивления, тем самым, нагружая ДПТ до тех пор, пока ток якоря не достигнет 1,5 А или ток статора не достигнет IС = IН. Данные опыта занесите в таблицу 4.
Таблица 4 – Результаты измерений и вычислений
| UЯ = | ||||
| n, об/мин | ||||
| IЯ, А | ||||
| М, Н∙м | ||||
После проведения опыта установите все переключатели модулей в исходное состояние. По данным таблицы 4 постройте характеристики n = f (MH), n = f (IЯ).
6. Снимите рабочие характеристики двигателя. Они представляют собой зависимость частоты вращения, электромагнитного момента, тока КПД от полезной мощности на валу двигателя при постоянном значении напряжении на зажимах двигателя n или ω; M, IЯ, ƞ = f (P2) при UЯ = UЯН = const, iB = const.
Опыт проводится в следующей последовательности:
- включите автоматы QF1, QF2;
- подайте разрешение на работу ТП (SA6) и, задав направление вращения, потенциометром RP1 установить напряжение UЯ = 0,75∙UЯН;
- переключателем SA1 модуля МДС1 вводите сопротивления, тем самым нагружая ДПТ до тех пор, пока ток якоря не достигнет 1,5 IЯН или ток статора не достигнет IС = IН = 1,3 A;
- по мере увеличения нагрузки потенциометром RP1 модуля ТП поддерживайте выходное напряжение преобразователя на уровне заданного.
Полученные данные занести в таблицу 5.
Таблица 5 – Результаты измерений и вычислений
| Данные опыта | Расчетные данные | |||||||||||||
| UЯ | IЯ | n | ω | iВ | РЯ | ΔPЭЛ.В. | Р1 | СМ | М | IA0 | М0 | М2 | Р2 | 
|
| В | A | об/мин | рад/c | A | Вт | Вт | Вт | Н∙м | A | Н∙м | Н∙м | Вт | % | |
После проведения опыта установите все переключатели модулей в исходное состояние.
7. Рассчитайте данные:
- мощность, подводимая к якорю двигателя, Вт:
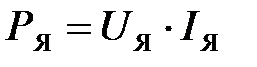 .
.
- мощность, подводимая к якорю двигателя, Вт:
 ,
,
где  – сопротивление обмотки возбуждения (приложение Б).
– сопротивление обмотки возбуждения (приложение Б).
- мощность, подводимая к якорю двигателя, Вт:
- электромагнитный момент,Н∙м:
 ,
,
где  – принимается в зависимости от угловой частоты вращения (Приложение В).
– принимается в зависимости от угловой частоты вращения (Приложение В).
- момент холостого хода двигателя, пропорциональный механическим потерям и потерям в стали, Н∙м:
 ,
,
где  – принимается в зависимости от угловой частоты вращения (Приложение В).
– принимается в зависимости от угловой частоты вращения (Приложение В).
- полезный момент на валу ДПТ, Н∙м:
 ;
;
- полезная мощность на валу двигателя, Вт:
 ;
;
- КПД, %:
 .
.
Полученные значения занести в таблицу 5. По данным таблицы 5 построить рабочие характеристики.
8. Снимите регулировочные характеристики двигателя при изменении напряжения, подводимого к зажимам двигателя.
Определите частота вращения двигателей постоянного тока определяется выражением:
 .
.
Снятие регулировочных характеристик при изменении напряжения, подводимого к зажимам двигателя, проводится в следующей последовательности:
- включите автоматы QF1 и QF2 модулей МПС и МП соответственно;
- подать разрешение на работу ТП (SA6) и, задав направление вращения, потенциометром RP1 установить напряжение UЯ= 200 В;
- изменением положения переключателя SA1 модуля МДС1 нагружают ДПТ до тех пор, пока ток якоря ДПТ не достигнет примерно значений IЯ ≈ 0,5IЯНи это положение переключателя оставляют неизменным, что соответствует М2 ≈ const;
- изменять положение RP1 модуля ТП таким образом, чтобы напряжение на зажимах цепи якоря UЯ уменьшалось примерно до 0,5UЯН. Полученные данные занести в таблицу 6.
Таблица 6 – Результаты измерений и вычислений
| Данные опыта | Расчетные данные | |||||||||||||
| UЯ | IЯ | n | ω | iВ | РЯ | ΔPЭЛ.В. | Р1 | СМ | М | IА0 | М0 | М2 | Р2 | 
|
| В | A | об/мин | рад/c | A | Вт | Вт | Вт | Н∙м | A | Н∙м | Н∙м | Вт | % | |
После проведения опыта установите все переключатели модулей в исходное состояние. По данным таблицы 6 построить зависимости n = f (UЯ),  = f (UЯ).
= f (UЯ).
Расчетные данные вычисляются так же, как при снятии рабочих характеристик.
По данным таблицы 6 построить зависимости  и
и  .
.
9. Снимите регулировочные характеристики двигателя посредством ослабления магнитного потока. Этот опыт осуществляется при отсутствии добавочного сопротивления в цепи якоря и постоянного напряжении на зажимах двигателя: Uя = const и Rяд = 0.
Частота вращения двигателей постоянного тока определяется выражением:
 .
.
Снятие регулировочных характеристик посредством ослабления магнитного потока проводится в следующей последовательности:
- включите автоматы QF1 и QF2 модулей МПС и МП соответственно;
- подайте разрешение на работу ТП (SА6) и, задав направление вращения, потенциометром RP1 установить напряжение UЯ = 200 В;
- изменением положения переключателя SA1 модуля МДС1 нагружайте ДПТ до тех пор, пока ток якоря ДПТ не достигнет примерное значений IЯ ≈ 0,5IЯН и это положение переключателя оставляют неизменным, что соответствует М2 ≈ const;
- переключателем SA2 модуля МДС2 вводитt сопротивление в цепь обмотки возбуждения, тем самым ослабляя магнитный поток, частота вращения не должна превышать 200 об/мин.
Если при проведении опыта ток возбуждения уменьшается ниже минимально допустимого, тиристорный преобразователь выключится и сработает светодиод «Защита». В этом случае следует выключить питание ТП, увеличить ток возбуждения.
Полученные данные занести в табл. 7.
Таблица 7 – Результаты измерений и вычислений
| Данные опыта | Расчетные данные | |||||||||||||
| UЯ | IЯ | n | ω | iВ | РЯ | ΔPЭЛ.В. | Р1 | СМ | М | IА0 | М0 | М2 | Р2 | 
|
| В | A | об/мин | рад/c | A | Вт | Вт | Вт | Н∙м | A | Н∙м | Н∙м | Вт | % | |
После проведения опыта установить все переключатели в исходное состояние, отключить автоматы QF2, QF1.
10. Рассчитайте следующие данные:
- ток возбуждения, А:
- мощность, подводимая к двигателю, Вт:
 .
.
Остальные расчетные данные вычисляются так же, как при снятии рабочих характеристик. По полученным значениям таблицы 7 построить зависимости n = f (iB),  = f (iB).
= f (iB).
11. Запишите вывод по проделанной работе.
Контрольные вопросы
1. Как изменить направление вращения ДПТ?
2. Почему у ДПТ возрастает ток якоря при увеличении нагрузки на его валу?
3. Почему при уменьшении тока возбуждения частота вращения ДПТ возрастает?
4. Как должен изменяться ток якоря при уменьшении тока возбуждения и постоянном моменте сопротивления на валу двигателя?
5. Как изменится вид механической характеристики двигателя, если ввести в цепь якоря регулировочное сопротивления RДЯ?
Лабораторная работа № 4
Дата добавления: 2018-06-27; просмотров: 1673; Мы поможем в написании вашей работы! |

Мы поможем в написании ваших работ!