Определение критической скорости автомобиля по условию управляемости.
Увод автомобильного колеса. Коэффициент сопротивления боковому
уводу и факторы, влияющие на него.
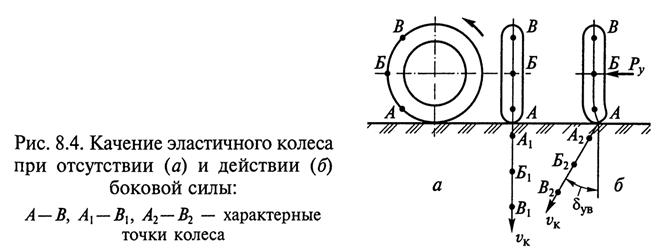
Уводом колеса называется его свойство катиться под углом к плоскости своего вращения вследствие действия боковой силы.
Эластичное колесо (рис. 8.4) при отсутствии боковой силы катится в плоскости своего вращения, а при действии боковой силы — под некоторым углом.
Угол 5ув, образованный вектором скорости vK колеса и плоскостью его качения, называется углом увода.
 На рис. 8.5 показана зависимость угла увода колеса от приложенной к нему поперечной силы. Кривая ОАБВ включает в себя следующие характерные участки: OA — увод колеса при отсутствии бокового скольжения шины (δув= 4...6°); АБ — увод с частичным боковым проскальзыванием шины; БВ— полное скольжение шины вбок при Рy = Рсц (δув = 12... 15°).
На рис. 8.5 показана зависимость угла увода колеса от приложенной к нему поперечной силы. Кривая ОАБВ включает в себя следующие характерные участки: OA — увод колеса при отсутствии бокового скольжения шины (δув= 4...6°); АБ — увод с частичным боковым проскальзыванием шины; БВ— полное скольжение шины вбок при Рy = Рсц (δув = 12... 15°).
Угол увода колеса можно определить по формуле:
δув=Py/kув,
где kув — коэффициент сопротивления уводу колеса.
Коэффициент сопротивления уводу колеса зависит от размеров и конструкции шины, давления воздуха в ней и вертикальной нагрузки на колесо. Так, при увеличении размеров шины и давления воздуха в ней коэффициент сопротивления уводу возрастает. При увеличении вертикальной нагрузки на колесо он сначала растет, а затем уменьшается (рис. 8.6). Для шин грузовых автомобилей и автобусов значения этого коэффициента составляют 30... 100 кН/рад, а для шин легковых автомобилей — 15...40 кН/рад. От значения коэффициента сопротивления уводу во многом зависит боковое скольжение колеса. Чем меньше этот коэффициент, тем раньше начинается боковое скольжение.
|
|
|
Поворачиваемость автомобиля.
В зависимости от соотношения углов увода передних и задних колес (мостов) автомобили могут иметь различную поворачиваемость: нейтральную, недостаточную и излишнюю.
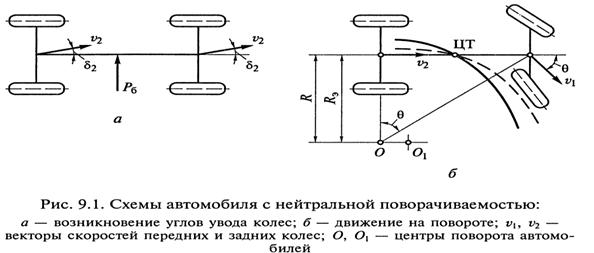
 Нейтральная поворачиваемость (рис. 9.1, а) характеризуется тем, что углы увода передних и задних колес равны (δ1= δ2) и, следовательно, радиусы поворота автомобилей с нейтральной пово- рачиваемостью и жесткими колесами тоже равны, т.е. Rэ = R (рис. 9.1, б). Хотя радиусы поворота Rэ и R равны, траектории движения автомобилей с нейтральной поворачиваемостью и жесткими колесами не совпадают, так как центры их поворота находятся в разных точках (О и O1).
Нейтральная поворачиваемость (рис. 9.1, а) характеризуется тем, что углы увода передних и задних колес равны (δ1= δ2) и, следовательно, радиусы поворота автомобилей с нейтральной пово- рачиваемостью и жесткими колесами тоже равны, т.е. Rэ = R (рис. 9.1, б). Хотя радиусы поворота Rэ и R равны, траектории движения автомобилей с нейтральной поворачиваемостью и жесткими колесами не совпадают, так как центры их поворота находятся в разных точках (О и O1).
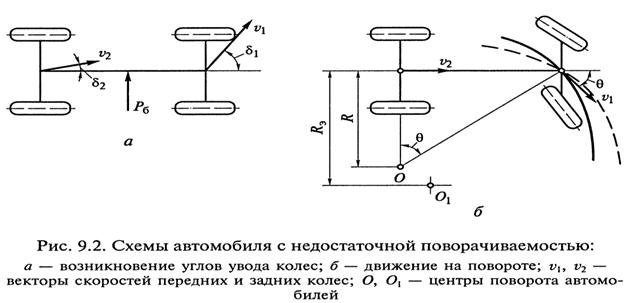
Недостаточная поворачиваемость (рис. 9.2, а) характеризуется тем, что угол увода передних колес больше, чем задних (δ1 > δ2), и R3> R. Для движения автомобиля с недостаточной поворачиваемостью (рис. 9.2, б) по траектории заданного радиуса управляемые колеса необходимо повернуть на больший угол, чем при жестких колесах, так как на повороте он стремится двигаться по кривой большего радиуса, чем определяемый положением передних управляемых колес. Следовательно, автомобиль с недостаточной поворачиваемостью безопасен при движении на повороте, так как у него имеется некоторый резерв «подруливания».
|
|
|
Излишняя поворачиваемость (рис. 9.4, а) характеризуется тем, что угол увода передних колес меньше, чем задних (δ1 < δ2), и Rэ < R. Для движения автомобиля (рис. 9.4, б) с излишней поворачиваемостью по траектории данного радиуса управляемые колеса следует повернуть на меньший угол, чем при жестких колесах, так как он на повороте стремится двигаться по кривой непрерывно уменьшающегося радиуса, что может привести к заносу задних колес. Следовательно, автомобиль с излишней поворачиваемостью при движении на повороте не имеет резерва «подруливания» и более опасен, чем автомобиль с недостаточной поворачиваемостью.
Дата добавления: 2018-05-13; просмотров: 1116; Мы поможем в написании вашей работы! |

Мы поможем в написании ваших работ!