Кинематический анализ рычажных механизмов
Постановка задачи
Если число степеней свободы механизма W = 1, то при фиксированных размерах звеньев значения их кинематических параметров движения однозначно определяются значениями кинематических параметров движения одного звена, называемого входным, которым и считается то звено, характер движения которого при кинематическом анализе полагается известным.
Тогда задача кинематического анализа формулируется следующим образом: при известных мгновенных значениях кинематических параметров движения входного звена определить мгновенные значения кинематических параметров движения остальных звеньев.
Таким образом, задача кинематического анализа решается автономно в каждом положении механизма, а для полного кинематического исследования её надо решить многократно для ряда последовательных положений механизма за весь цикл его работы.
В дальнейшем при нумерации звеньев входное всегда будет иметь номер 1. Если оно совершает вращательное движение, то по условию задачи должны быть заданы: его угол поворота j01 от оси Х0 неподвижной системы координат (НСК), угловая скорость w1, угловое ускорение e1. Если вращающееся входное звено совершает полные обороты, то его называют кривошипом. Часто его угол поворота удобно отсчитывать от того значения j01, которое соответствует какому-то характерному положению механизма, например, крайнему положению рабочего органа, тогда будем обозначать его j1.
|
|
|
В результате решения задачи для звеньев, совершающих сложное движение, например, шатуны, необходимо определить:
а) поступательную составляющую движения, характеризуемую положением, скоростью и ускорением центра масс,
б) вращательную составляющую, характеризуемую углом поворота, угловой скоростью и угловым ускорением звена. Для вращающихся звеньев достаточно определить их угол поворота, угловую скорость и угловое ускорение. Для поступательно движущихся звеньев – положение интересующей нас точки, например, центра масс и его линейную скорость и ускорение.
Решение описанной задачи опирается на структурный анализ механизма. Общая последовательность кинематического расчета следующая.
1. По исходно заданным кинематическим параметрам движения входного звена определяются параметры движения той его точки, в которой присоединяется первая структурная группа. Эти значения преобразуются в её систему координат.
2. Производятся расчеты для этой структурной группы и вычисляются параметры движения той точки её звена, в которой присоединяется следующая группа.
3. Эти значения преобразуются в систему координат следующей структурной группы, производится её расчет и т.д.
|
|
|
В соответствии с описанным алгоритмом строится и дальнейшее изложение. Сначала будет рассмотрена кинематика входных механизмов, а после этого расчет структурных групп, для которых уже можно будет полагать, что параметры движения входных кинематических пар известны. Основные расчетные зависимости для структурных групп получим методом векторных контуров [5, 9, 14, 18], параметры движения характерных точек на звеньях, таких как центры масс, рабочий орган и т.п. – методом преобразования координат.
Расчетные зависимости для определения кинематических параметров движения звеньев будут получены для структурных групп 2 класса 2 порядка. При этом итоговые выражения в качестве необходимых исходных данных будут содержать параметры движения входных кинематических пар. Это позволяет использовать полученные зависимости для расчета механизмов, содержащих несколько структурных групп и при различных видах движения входного звена.
2.1.1. Метод планов скоростей и планов ускорений
Скорости и ускорения могут быть определены с помощью графических построений, которые называются соответствующими планами.
Из теоретической механики известно, что движение некоторой точки М по отношению к основной системе отсчета, которая принята за неподвижную, называется абсолютным, по отношению к подвижной системе отсчета - относительным, а движение подвижной системы отсчета по отношению к основной - переносным движением. Скорость и ускорение точки М по отношению к каждой из систем называют соответственно абсолютными скоростью  и ускорением
и ускорением  или относительными скоростью
или относительными скоростью  и ускорением
и ускорением  . Скорость и ускорение точки М', связанной с подвижной системой отсчета и совпадающей в данный момент с движущейся точкой М, называют переносной скоростью
. Скорость и ускорение точки М', связанной с подвижной системой отсчета и совпадающей в данный момент с движущейся точкой М, называют переносной скоростью  и ускорением
и ускорением  .
.
|
|
|
Абсолютные скорость и ускорение любой точки можно найти из векторных уравнений вида
 , ,
| (2.7) |
 . .
| (2.8) |
В общем случае переносное и относительное ускорения состоят из нормальной (центростремительной) и тангенциальной (касательной) составляющих
 , ,
| (2.9) |
 . .
| (2.10) |
Кориолисово (поворотное) ускорение определяется равенством
 , ,
| (2.11) |
а его величина равна:
 , ,
| (2.12) |
где  и
и  - вектор и величина переносной угловой скорости. Из выражений (2.11) и (2.12) следует, что
- вектор и величина переносной угловой скорости. Из выражений (2.11) и (2.12) следует, что  в трех случаях: когда переносное движение является поступательным ( =0), когда точка имеет мгновенную остановку в относительном движении (ur = 0), когда векторы
в трех случаях: когда переносное движение является поступательным ( =0), когда точка имеет мгновенную остановку в относительном движении (ur = 0), когда векторы  и параллельны (sin( , ) = 0).
и параллельны (sin( , ) = 0).
|
|
|
Методы планов скоростей и ускорений позволяют с помощью графических построений решать системы уравнений типа (2.7) и (2.8). Покажем это на двух простых примерах.
Рассмотрим структурную группу 1-го вида (рис. 2.6, а), для точек В и D которой известны скорости  и
и  , а также ускорения
, а также ускорения  и
и  . Нужно определить скорости и ускорения точек С, S2 и S3. В неподвижной системе отсчета точки С2 и С2 звеньев 2 и 3 движутся одинаково, постоянно совпадая с центром шарнира С. Расстояния ВС2= ВС и DC3=DC при этом не изменяются.
. Нужно определить скорости и ускорения точек С, S2 и S3. В неподвижной системе отсчета точки С2 и С2 звеньев 2 и 3 движутся одинаково, постоянно совпадая с центром шарнира С. Расстояния ВС2= ВС и DC3=DC при этом не изменяются.
Подставляя в выражение (2.7) для звена 2  ,
,  и
и  , а для звена 3 -
, а для звена 3 -  ,
,  ,
,  , получаем систему уравнений
, получаем систему уравнений
в которых известны  и , а неизвестны величина и направление
и , а неизвестны величина и направление  , а также величины векторов
, а также величины векторов  и
и  . Такую систему уравнений можно решить графически.
. Такую систему уравнений можно решить графически.
Для этого из произвольной точки Рv, названной полюсом плана скоростей, откладываем в удобном масштабе векторы и  , а через их концы b и d проводим прямые, параллельные относительным скоростям
, а через их концы b и d проводим прямые, параллельные относительным скоростям  и
и  , т. е. перпендикулярные отрезкам СВ и CD (рис. 2.6, б). Точка с пересечения этих прямых будет являться концом вектора
, т. е. перпендикулярные отрезкам СВ и CD (рис. 2.6, б). Точка с пересечения этих прямых будет являться концом вектора  , начало которого лежит в полюсе плана Рv. Относительные скорости и будут представлены векторами
, начало которого лежит в полюсе плана Рv. Относительные скорости и будут представлены векторами  и
и  .
.
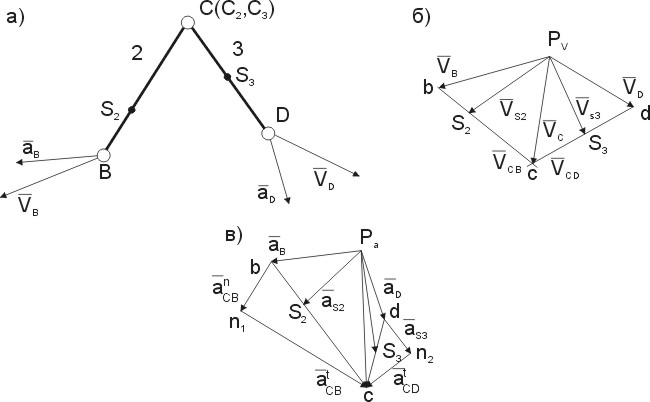
Рис. 2.6
Планом скоростей звена называют геометрическое место концов векторов скоростей всех точек этого звена (каждый вектор начинается в полюсе Рv).
Для нахождения скоростей  и
и  , точек S2 и S3 удобно воспользоваться так называемым правилом подобия: план скоростей звена подобен самому звену и повернут по отношению к нему на угол 90°. Поэтому концы S2 и S3 векторов
, точек S2 и S3 удобно воспользоваться так называемым правилом подобия: план скоростей звена подобен самому звену и повернут по отношению к нему на угол 90°. Поэтому концы S2 и S3 векторов  и
и  можно определить делением отрезков bc и cd в соответствии с пропорциями
можно определить делением отрезков bc и cd в соответствии с пропорциями
 и и  . .
| (2.13) |
Величины всех найденных скоростей находятся с учетом принятого масштаба. Вся совокупность построений называется планом скоростей группы.
В данном случае переносное движение является поступательным (  ), поскольку звенья 2 и 3 образуют друг с другом вращательную пару и поворот одного звена не вызывает поворота другого. Для определения ускорения точки С используем выражение (2.8), а с учетом и
), поскольку звенья 2 и 3 образуют друг с другом вращательную пару и поворот одного звена не вызывает поворота другого. Для определения ускорения точки С используем выражение (2.8), а с учетом и  получим такую систему уравнений:
получим такую систему уравнений:
 ; ;  , ,
| (2.14) |
где  и
и  - нормальные (центростремительные) составляющие относительных ускорений, направленные параллельно СВ и CD от точки С в сторону точек В и D;
- нормальные (центростремительные) составляющие относительных ускорений, направленные параллельно СВ и CD от точки С в сторону точек В и D;
 и
и  - тангенциальные (вращательные) составляющие относительных ускорений, направленные перпендикулярно отрезкам ВС и CD.
- тангенциальные (вращательные) составляющие относительных ускорений, направленные перпендикулярно отрезкам ВС и CD.
Величины нормальных составляющих определяют с помощью выражений  и
и  , в которые подставляются
, в которые подставляются  и
и  , найденные из плана скоростей. После определения нормальных составляющих систему (2.14) можно решить графически. Для этого из произвольно взятой точки Ра - полюса плана ускорений - откладываем в удобном масштабе векторы
, найденные из плана скоростей. После определения нормальных составляющих систему (2.14) можно решить графически. Для этого из произвольно взятой точки Ра - полюса плана ускорений - откладываем в удобном масштабе векторы  и
и  , затем пристраиваем в точках b и d векторы
, затем пристраиваем в точках b и d векторы  и
и  , а через концы n1 и n2 последних проводим прямые, параллельные
, а через концы n1 и n2 последних проводим прямые, параллельные  и
и  (рис. 2.6, в). Точка пересечения с этих прямых и будет являться концом вектора
(рис. 2.6, в). Точка пересечения с этих прямых и будет являться концом вектора  , начало которого лежит в полюсе плана Ра, а также концом каждого из векторов и ,начинающихся в точках n1 и n2.
, начало которого лежит в полюсе плана Ра, а также концом каждого из векторов и ,начинающихся в точках n1 и n2.
Для нахождения ускорений  и
и  снова воспользуемся правилом подобия: план ускорений звена подобен самому звену и повернут по отношению к нему на угол
снова воспользуемся правилом подобия: план ускорений звена подобен самому звену и повернут по отношению к нему на угол  . Поэтому для построения точек s2 и s3 остаются справедливыми пропорции (2.13). Эти точки находят после проведения отрезков bc и dc. Вся совокупность выполненных построений называется планом ускорений группы.
. Поэтому для построения точек s2 и s3 остаются справедливыми пропорции (2.13). Эти точки находят после проведения отрезков bc и dc. Вся совокупность выполненных построений называется планом ускорений группы.
Теперь на примере структурной группы 3-го вида (рис. 2.7, а) рассмотрим более общий случай. Звенья 2 и 3такой группы образуют друг с другом поступательную пару, и поворот одного из них влечет за собой поворот другого. Кроме того, совпадающие в данный момент с точкой С точки С2, и С3 движутся по-разному, т. е. имеют различные скорости и ускорения. Расхождение точек C2 и С3 по прямой будем считать относительным движением, а вращение звеньев группы с угловой скоростью  - переносным.
- переносным.
К точке В потребуется подойти так же, как и к точке С, т. е. считать, что в точке В помимо реальной точки В2, принадлежащей звену 2, находится воображаемая точка В3, принадлежащая звену 3.
Для простоты положим, что звено 3 вращается вокруг неподвижной точки D, т. е.  и
и  , с известной в данный момент угловой скоростью w3. Заданными будем считать скорость
, с известной в данный момент угловой скоростью w3. Заданными будем считать скорость  и ускорение
и ускорение  точки В на звене 2.Определению подлежат скорости и ускорения точек B3, C2, C3, S2, и S3.
точки В на звене 2.Определению подлежат скорости и ускорения точек B3, C2, C3, S2, и S3.
Сначала определим  и
и  . Затем с учетом формулы (2.10) составим систему уравнений
. Затем с учетом формулы (2.10) составим систему уравнений  , в которых известны направления векторов
, в которых известны направления векторов  ||CD и
||CD и  ^BC.
^BC.
Отложив в удобном масштабе из выбранного полюса Рv векторы  и
и 
(рис. 2.7, б) и проведя через их концы c3 и b2 прямые, параллельные ||CD и ^BC, находим точку их пересечения c2, являющуюся концом вектора  . Для нахождения точек s2 и s3 и векторов
. Для нахождения точек s2 и s3 и векторов  и
и  снова используем правило подобия и отношения (2.13), в которых b нужно заменить на b2, а с - на c2 или c3 и учесть, что точка d совпадает с полюсом Рv.
снова используем правило подобия и отношения (2.13), в которых b нужно заменить на b2, а с - на c2 или c3 и учесть, что точка d совпадает с полюсом Рv.
Помимо этого на плане скоростей группы нужно изобразить уже известный вектор  и найти относительную скорость
и найти относительную скорость  ||CD, которая потребуется в дальнейшем. Если все построения верны, то в соответствии с правилом подобия Ddb3c3 ~ DDBC.
||CD, которая потребуется в дальнейшем. Если все построения верны, то в соответствии с правилом подобия Ddb3c3 ~ DDBC.
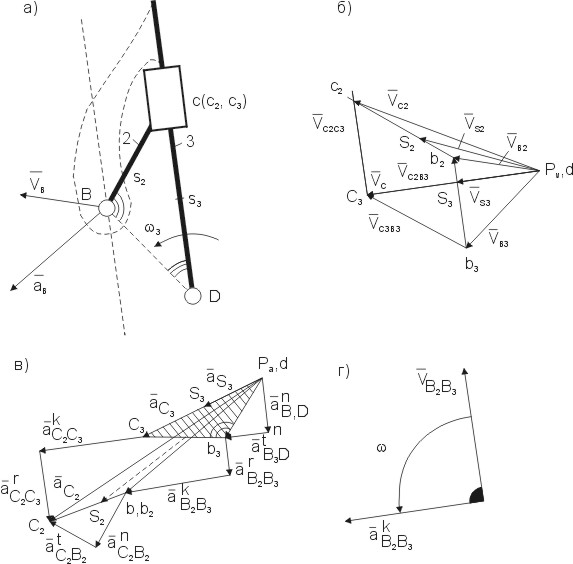
Рис. 2.7
Для определения ускорений используем формулы (2.8) - (2.10), которые позволяют получить необходимые системы уравнений. Так, для точки В2  ;
;  , где
, где  и
и  .
.
Отложив из полюса Ра в удобном масштабе известные векторы  и
и 
(рис. 2.7, в), пристраиваем концом к точке b2 вектор  , через его начало проводим прямую, параллельную
, через его начало проводим прямую, параллельную  ||CD, а через конец вектора - точку п - прямую, параллельную
||CD, а через конец вектора - точку п - прямую, параллельную  . Пересечение этих прямых дает нам точку b3 - конец вектора
. Пересечение этих прямых дает нам точку b3 - конец вектора  .
.
Для нахождения ускорения  точки С3 используем правило подобия, построив на отрезке db3 (здесь точка d совпадает с полюсом плана Ра) как на стороне и двум примыкающим к ней углам треугольник db3c3, подобный треугольнику DBC.
точки С3 используем правило подобия, построив на отрезке db3 (здесь точка d совпадает с полюсом плана Ра) как на стороне и двум примыкающим к ней углам треугольник db3c3, подобный треугольнику DBC.
Теперь можно решить такую систему уравнений:
 ;
;  , где
, где  и
и  .
.
Отложив из найденной предыдущим построением точки С3 вектор  , проведем через его конец прямую, параллельную
, проведем через его конец прямую, параллельную  ||CD. Затем, отложив из точки b2 вектор
||CD. Затем, отложив из точки b2 вектор  ||ВС, проведем через его конец прямую, параллельную
||ВС, проведем через его конец прямую, параллельную  (^ВС). Пересечение указанных прямых дает нам точку С2 - конец вектора
(^ВС). Пересечение указанных прямых дает нам точку С2 - конец вектора  . Точки s2 и s3, определяющие концы векторов
. Точки s2 и s3, определяющие концы векторов  и
и  , находим по правилу подобия пропорциональным делением отрезков b2c2 и c3d.
, находим по правилу подобия пропорциональным делением отрезков b2c2 и c3d.
2.1.2. Метод векторных контуров
Этот аналитический метод удобен для нахождения угловых кинематических параметров с помощью системы уравнений, полученных из условия замкнутости одного или нескольких векторных контуров, которые определяют положение звеньев механизма. Например, шарнирный четырехзвенник (рис. 2.8) можно представить всего одним векторным контуром 
 .
.

Рис. 2.8
Проецируя его на оси ОХ и OY неподвижной системы координат, получаем
 , ,
| (2.15) |
 . .
|
Величины l1, l2, l3, l4, и j1 считаем заданными. Тогда система (2.15) относительно j2 и j3 может быть решена, например, следующим образом. Записав
 ;
;
 ,
,
| или |  , ,
| (2.16) |
 , ,
|
где  и
и  .
.
Возведем уравнения (2.16) в квадрат и сложим, в результате получим

| или |  , ,
| (2.17) |
где  и
и  .
.
После возведения в квадрат обеих частей выражения (2.17) получаем следующее квадратное уравнение для определения угла j2:

(его решение для краткости не приводим).
Определив угол j2, находим j3, использовав любое из уравнений (2.16).
Угловые скорости ω2 и ω3 звеньев 2 и 3 найдутся после дифференцирования уравнений (2.15) по времени. Учитывая, что dj1/dt=ω1 (эта угловая скорость считается заданной), dj2/dt= ω2 и dj3/dt= ω3, а l4 = const, получаем систему

| (2.18) |

|
которую можно решить приемом вычитания одинакового известного угла j2 или j3 из всех углов, входящих в первое уравнение. Так, вычитая j3, получаем  откуда
откуда
| . |
| , |
| , |
| . |

Используя тот же прием, что и для решения системы (2.18), находим
| . |
| , |
Дата добавления: 2018-05-12; просмотров: 323; Мы поможем в написании вашей работы! |

Мы поможем в написании ваших работ!