Структурный анализ и синтез рычажных механизмов
Федеральное государственное бюджетное образовательное учреждение высшего профессионального образования
«ПЕТЕРБУРГСКИЙ ГОСУДАРСТВЕННЫЙ УНИВЕРСИТЕТ ПУТЕЙ СООБЩЕНИЯ»
__________________________________________________________
Кафедра «Автоматизированное проектирование»
Копылов А.З.
Теория механизмов и
машин
Курс лекций
Санкт-Петербург, 2017
СТРУКТУРА И КЛАССИФИКАЦИЯ МЕХАНИЗМОВ
Курс “Теория механизмов и машин” (ТММ) изучает наиболее общие методы исследования свойств механизмов и машин и проектирования их схем. Этот курс можно условно подразделить на две части, соответственно изучающие:
- структуру, классификацию и кинематику механизмов (рассматриваются строение механизмов, группировка их по определенным признакам и движение без учета причин, его вызывающих);
- динамику механизмов и машин (рассматривается их движение под действием приложенных сил).
В обеих частях выполняется решение двух взаимосвязанных задач: анализа, т. е. исследования свойств заданных (уже известных) схем механизмов и машин, и синтеза, т. е. проектирования схемы механизма или машины с заданными структурными, кинематическими или динамическими свойствами.
Основные понятия и определения
Любое техническое устройство, в том числе механизм или машина, всегда состоит из целого ряда отдельно изготовленных частей, именуемых деталями. Однако при изучении работы механизма или машины можно прийти к заключению, что несколько жестко скрепленных деталей могут составлять систему, которая движется как единое твердое тело. Такую совокупность деталей называют звеном, и это понятие очень удобно использовать при исследовании движения механической системы. Иногда отдельное звено состоит всего из одной детали, но все-таки чаще всего - из нескольких. Звенья могут быть связаны друг с другом либо непосредственно, либо с помощью дополнительных элементов: ремней, тросов и т. п., именуемых гибкими связями. Используемые в механизмах и машинах жидкости и газы звеньями не считаются и называются рабочими телами.
Соединение двух соприкасающихся звеньев, которое допускает их относительное движение, называется кинематической парой (или просто парой). При этом каждое из звеньев имеет свой элемент кинематической пары - геометрическое место точек возможного контакта с другим звеном, входящим в пару. Звенья бывают простыми и сложными. Простое звено входит в состав одной или двух пар, а сложное- трех и более.
Совокупность звеньев, связанных между собой кинематическими парами, называется кинематической цепью (или просто цепью). Цепи могут быть замкнутыми, если каждое звено входит не менее чем в две кинематические пары, и незамкнутыми.
Механизмом называют кинематическую цепь, предназначенную для преобразования заданного движения одного или нескольких звеньев в требуемое движение других звеньев. Те звенья, которым задается движение, называются входными, а те, что выполняют требуемые (целевые) движения, - выходными. Движение звеньев механизма удобнее рассматривать относительно одного из них, которое принимается за неподвижное. Такое звено называется стойкой и на схемах отмечается штриховкой. Начальным звеном будем называть звено, которому приписывают одну (очень редко - несколько) из обобщенных координат механизма, однозначно определяющих положения всех его подвижных звеньев относительно стойки. В большинстве случаев в качестве начального выбирают входное или выходное звено, с которого начинают определять положения остальных. Помимо этого будем различать ведущие и ведомые звенья. Ведущим называют звено, для которого сумма элементарных работ приложенных к нему внешних сил положительна. Для ведомого звена она отрицательна. Обычно ведущее звено совпадает с входным, но могут быть случаи, когда в процессе движения входное звено попеременно становится то тем, то другим. Например, поршень двигателя внутреннего сгорания, являясь входным звеном, на такте горения топливной смеси будет ведущим, а на тактах выпуска, впуска и сжатия - ведомым. Кроме того, нужно учитывать, что при рассмотрении отдельных узлов механизма или машины одно и то же звено может быть ведомым по отношению к одним звеньям и ведущим по отношению к другим. В том же автомобильном двигателе распределительный (кулачковый) вал будет ведомым по отношению к коленчатому валу, но ведущим по отношению к коромыслам, а также впускным и выпускным клапанам.
Кинематическим соединением называется кинематическая цепь, конструктивно заменяющая в механизме кинематическую пару. При этом только два звена этой цепи могут соединяться с другими звеньями механизма. Примером такого устройства служит шарикоподшипник, внешнее и внутреннее кольца которого сочленяются со звеньями, образующими как бы одноподвижную вращательную пару 5-го класса.
Кинематические пары, цепи и механизмы называют плоскими, если точки их движущихся звеньев описывают траектории, лежащие в параллельных плоскостях. В противном случае они будут пространственными.
Машиной будем называть устройство, выполняющее механические движения для преобразования энергии, материалов или информации с целью замены или облегчения физического и умственного труда. В состав машины может входить один или несколько механизмов, а сами машины, в свою очередь, могут объединяться в сложные механические системы (машинные агрегаты, машины-автоматы, промышленные роботы и т. д.).
Как уже отмечалось выше, в курсе “Теория механизмов и механика машин” рассматриваемые объекты изображаются в виде схем. Схемы могут быть структурными и кинематическими. Структурная схема кинематической цепи или механизма указывает только звенья и характер их взаимосвязи, т. е. вид кинематических пар. Кинематическая схема в дополнение к этому вычерчивается в масштабе с указанием тех размеров, которые определяют кинематические параметры механизма. Оба вида схем необходимо вычерчивать в соответствии с принятыми условными обозначениями по ГОСТ 2.770–68 .
Структурный анализ и синтез рычажных механизмов
В этой главе рассматриваются основные понятия, относящиеся к строению механизмов.
Кинематические пары классифицируют по двум признакам [1, 9, 14, 18].
1. По количеству ограничений, накладываемых кинематической парой на относительное движение звеньев, входящих в кинематическую пару. По этой классификации класс кинематической пары и равен количеству ограничений, накладываемых кинематической парой на относительное движение звеньев. Поскольку свободное тело в пространстве имеет 6 степеней свободы, то в принципе существует 5 классов кинематических пар. Однако практическое применение имеют, как правило, лишь пары 5, 4 и 3 класса.
2. По характеру контакта звеньев в кинематической паре. По этой классификации кинематические пары делятся на:
а) Низшие – такие, контакт в которых происходит по поверхности.
б) Высшие – такие, контакт в которых происходит по линии или в точке.
Здесь необходимо уточнить, что при классификации кинематических пар приняты следующие допущения:
а) Форма контактирующих поверхностей идеальна.
б) В кинематических парах отсутствуют зазоры.
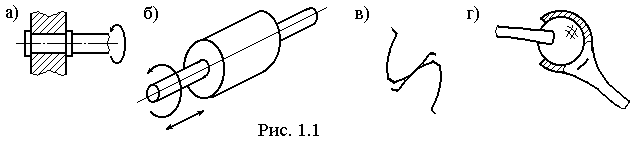
На рис. 1.1 представлены примеры. На рис 1.1а – кинематическая пара 5 класса, низшая. Она отнимает 5 степеней свободы, оставляя только одну – вращательную. Контакт между звеньями происходит по цилиндрической поверхности.
На рис 1.1б – кинематическая пара 4 класса, низшая. Она отнимает 4 степеней свободы, оставляя две – одну вращательную и одну поступательную. Контакт между звеньями происходит по цилиндрической поверхности.
На рис 1.1в – кинематическая пара 4 класса, высшая (зубчатое зацепление). Она отнимает 4 степеней свободы, оставляя две – возможность вращения колес и скольжения контактирующих поверхностей. Контакт между звеньями происходит по линии.
На рис 1.1г – кинематическая пара 3 класса, низшая (шаровой шарнир). Она отнимает все 3 поступательные степени свободы, оставляя три вращательных. Контакт между звеньями происходит по сферической поверхности.
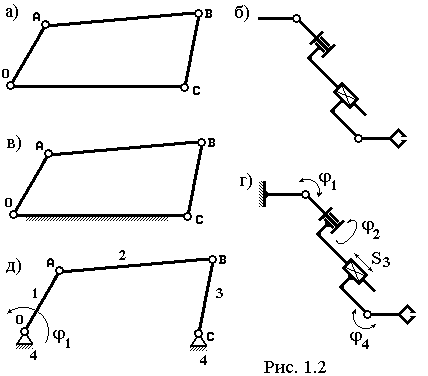
Следующая структурная единица это кинематическая цепь – связная совокупность звеньев, образующих кинематические пары. Кинематические цепи в зависимости от расположения звеньев могут быть:
а) Плоские, т.е. такие, все движения звеньев которых происходят в одной или параллельных плоскостях (рис. 1.2а).
б) Пространственные (рис. 1.2б).
Кроме того, они могут быть:
а) Замкнутые (рис. 1.2а).
б) Разомкнутые (рис. 1.2б).
Теперь можно дать структурное определение механизма: механизмом называется кинематическая цепь, одно звено которой считается неподвижным. То есть механизм образуется из кинематической цепи закреплением одного из звеньев (рис. 1.2в,г,д). Это неподвижное звено называют стойкой и относительно него рассматриваются движения остальных звеньев.
Дата добавления: 2018-05-12; просмотров: 229; Мы поможем в написании вашей работы! |

Мы поможем в написании ваших работ!