Классификация рычажных механизмов
В основу классификации рычажных механизмов положен структурный признак. Рассмотрим такой подход к классификации на примере плоских механизмов с замкнутыми кинематическими цепями.
Будем считать, что любой сложный рычажный механизм состоит всего из трех типов элементов:
- одного исходного механизма; в редких случаях таких механизмов может быть несколько - их число совпадает с числом степеней свободы w всего сложного механизма;
- любого числа наиболее простых кинематических цепей с нулевой подвижностью (w = 0), называемых структурными группами или группами Ассура;
- любого числа пассивных звеньев; эти элементы являются необязательными и могут отсутствовать.
Исходным механизмом будем называть кинематическую цепь, состоящую из одного подвижного звена 1 и стойки (n+1). Это понятие нужно считать условным, так как в подобной цепи не происходит никакого преобразования движения. Две разновидности исходного механизма показаны на рис. 2.1, для каждой из них степень подвижности, определяемая по формуле (1.2), равна  .
.

Рис. 2.1
Исходному механизму присвоен 1-й класс и 1-й порядок (понятие порядок будет пояснено в следующем пункте.
В соответствии с ранее приведенным определением структурная формула (1.2) для группы Ассура принимает вид  .
.
Поскольку величины п и р5 являются целыми, то из очевидных соотношений n=(2/3)·р5 и р5 = (3/2)·n получаем следующие необходимые признаки структурной группы: число звеньев в группе всегда четное (п=2, 4, 6, 8, ...); число кинематических пар, в которые входят или могут входить звенья группы, всегда кратно трем (р5 =3, 6, 9, 12, ...); невозможность расчленения группы на более простые цепи с нулевой подвижностью.
|
|
|
Все структурные группы подразделяют на классы (2-й, 3-й и 4-й), а также им присваивают определенный порядок, номер которого совпадает с числом поводков,
т. е. звеньев со свободным элементом кинематической пары, которым каждое из них может быть присоединено к другому. Если все поводки присоединить свободными элементами к какому-либо одному звену, например, к стойке, - структурная группа превращается в жесткую ферму.
К группам 2-го класса (диады) относят наиболее простые с п=2 и р5 =3, состоящие всего из двух звеньев 2 и 3 (рис. 2.2), которые входят друг с другом в кинематическую пару и помимо этого могут образовать кинематические пары еще с двумя звеньями. Следовательно, в данном случае каждое из звеньев является поводком и все группы 2-го класса имеют 2-й порядок.
В зависимости от взаимного расположения вращательных (в) и поступательных (п) пар и с учетом степени распространенности такие группы условно подразделяют на пять видов (рис. 2.2). Группы 6-го вида с одними поступательными парами (п-п-п) не существует, так как после присоединения к стойке она образует не ферму, а разновидность клинового механизма.
|
|
|
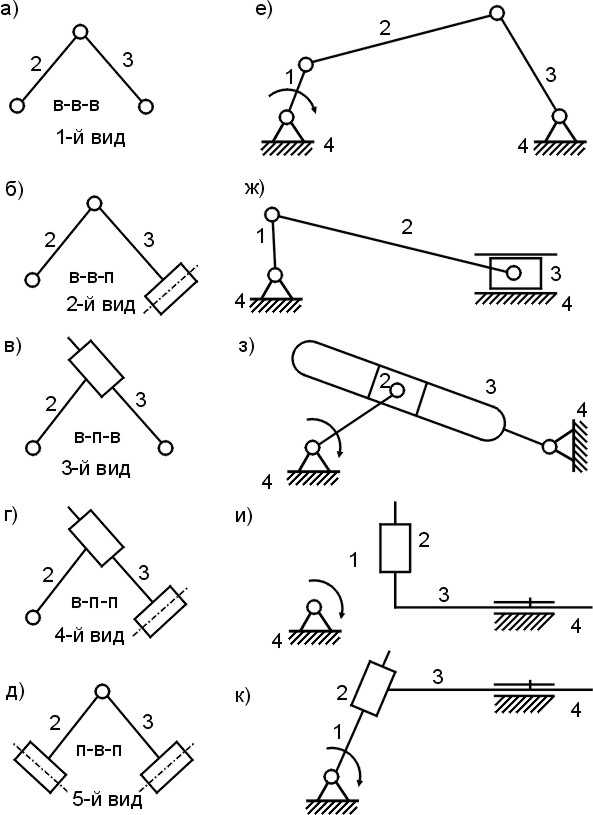
Рис. 2.2
На рис. 2.2, е - к приведены примеры схем простейших четырехзвенных механизмов, в которых использованы группы каждого из видов, причем свободные элементы пар соединены с подвижным 1 и неподвижным 4 звеньями исходного механизма. Вращающееся звено, совершающее полный оборот вокруг неподвижной оси, называют кривошипом, неполный оборот - коромыслом, а если оно в дополнение к одному из этих признаков образует еще поступательную пару с другим подвижным звеном, - кулисой. Звено, образующее поступательную пару со стойкой, в общем случае называют ползуном, а входящее в кинематические пары только с подвижными звеньями - шатуном. С учетом сказанного механизм на рис. 2.2, е можно назвать кривошипно-коромысловым или шарнирным четырехзвенником, на рис. 2.2, ж - кривошипно-ползунным, на рис. 2.2, з - кривошипно-кулисным. Иногда в названии механизма подчеркивают его функциональное назначение. Например, механизм на рис. 2.2, и называют синусным, а на рис. 2.2, к - тангенсным, поскольку линейные перемещения ползунов в них будут пропорциональны синусу и тангенсу угла поворота звена 1.
Дата добавления: 2018-05-12; просмотров: 971; Мы поможем в написании вашей работы! |

Мы поможем в написании ваших работ!