Релейные астатические регуляторы
Двухпозиционные регуляторы.
Выходная величина регулятора может принимать только два значения: минимальное и максимальное. Статические характеристики: допустим, что текущее значение у регулируемой величины меньше заданного узд, т.е. ε>0, тогда выходная величина u регулятора принимает мах значение umax. Если ε<0, то umin. Выходная величина идеального регулятора (рис 73а) переходит от одного значения к другому скачком при прохождении текущего значения регулируемой величины через заданное значение. Регулятор с зоной неоднозначности (рисунок 73б) выходная величина u изменяется от мин до максимального значения при у=узд-b или ε=+b и от макс до мин значения при у=узд+b или ε=-b.

Рисунок 73
Пример: электроконтактный термометр.
Рассмотрим процессы в регуляторе при идеальной релейной характеристике без зоны нечувствительности и без петли гистерезиса. Такой релейный регулятор называется двухпозиционным.
Ход процесса регулирования в релейных системах определяют следующим образом.
Считают, что все звенья системы, кроме реле, имеют линейные характеристики. Составляют уравнение динамики линейной части системы. При известных начальных условиях решают составленную систему уравнений, присоединяя к ней уравнение реле, например, для замкнутого верхнего контакта. Решение ведут до тех пор, пока не замкнется нижний контакт. В качестве начальных условий для этого участка берут данные, полученные в конце предыдущего участка.
|
|
|
Такой метод нахождения решения для процесса регулирования в релейной системе называют методом припасовывания. Однако такой метод достаточно трудоемок, и поэтому проще находить решение, используя метод прямого математического моделирования.
Двухпозиционный релейный регулятор рассмотрим на примере релейной системы поддержания постоянной температуры на регулируемом объекте, который испытывает возмущающее воздействие.
Здесь двухпозиционный регулятор работает как переключатель, который либо включает нагреватель на полную мощность, либо полностью отключает его. Такой широко распространенный двухпозиционный регулятор прост в эксплуатации и обеспечивает хорошие регулировочные свойства.
Переходный процесс в системе с двухпозиционным регулированием при поддержании постоянной температуры является автоколебательным (рисунок 74). Показателями автоколебательного режима являются амплитуда  и частота
и частота  или период автоколебаний
или период автоколебаний 
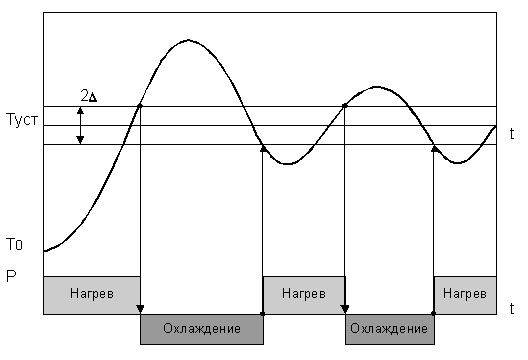
Рисунок 74
Методы выбора закона регулирования, исходя из свойств объекта.
При выборе закона регулирования непрерывного действия необходимо принимать во внимание следующее:
|
|
|
П-регуляторы могут применяться для управления объектами с самовыравниванием и без самовыравнивания при небольших изменениях нагрузок, если технологическим режимом допустимо остаточное отклонение параметра от заданного значения (статическая ошибка);
И-регуляторы не могу применяться на объектах, не обладающих самовыравниванием. Система, состоящая из объекта управления без самовыравнивания иИ-регулятора неустойчива. Поскольку быстродействие И -регулятора невелико, самовыравнивание объекта должно быть значительным, запаздывание небольшим, а изменение нагрузок плавным;
ПИ-регуляторы применяют для регулирования как устойчивых, так и нейтральных объектов при больших, но плавных изменениях нагрузок, когда требуется высокая точность регулирования в статическом режиме (когда остаточные отклонения недопустимы).
ПД- и ПИД-регуляторы обеспечивают относительно высокое качество регулирования объектов, обладающих переходным запаздыванием (например теплообменных и массообменных аппаратов), а так же в тех случаях, когда нагрузка в объектах регулирования изменяется часто и быстро.
Выбор того или иного закона управления определяется в первую очередь динамическими свойствами объекта управления, величиной и характером возмущающих воздействий, а также заданными показателями качества регулирования. Следуя этим требованиям в качестве заданного переходного процесса выбирают один из трех типовых переходных процессов: граничный апериодический с минимальным временим переходного процесса, с 20%-ным перерегулированием и минимальным временем первого полупериода колебаний, с минимальным значением интеграла от квадрата ошибки.
|
|
|
Переходный процесс в системе управления зависит от свойств химико-технологического объекта, от характера, величины и места приложения возмущающих воздействий и от закона регулирования и параметров настройки регулятора. Чтобы достичь требуемого качества регулирования для выбранного типового переходного процесса, следует принять подходящий закон регулирования и определить параметры настройки.
Предварительным критерием выбора структуры системы регулирования и закона действия регулятора может служить величина отношения времени запаздывания объекта и постоянной времени объекта: τзап/То. для нейтральных объектов вместо То подставляют Та. при соотношении τзап/То<0 удовлетворяет качество регулирования можно получить, используя однократную систему регулирования.
|
|
|
В зависимости от величины этого отношения можно предварительно выбрать закон действия регулятора:
При соотношении τзап/То<0,2 и небольших изменениях нагрузки целесообразно использовать регулятор релейного действия
При соотношении τзап/То>0,2 лучшее качество регулирования обеспечивают регуляторы непрерывного действия, причем с ростом соотношения τзап/То для обеспечения требуемого качества регулирования необходимо выбирать более сложные законы регулирования (П→ПИ→ПИД).
Если τзап/То>1, то при использовании одноконтурной системы регулирования ни один из линейных законов регулирования не дает удовлетворительного качества регулирования. Тогда необходимо использовать многоконтурные системы регулирования.
По рисунку 75 можно проанализировать рабочие характеристики различных регуляторов.

Рисунок 75
IV. МНОГОКОНТУРНЫЕ СИСТЕМЫ
РЕГУЛИРОВАНИЯ
Многие объекты химической технологии обладают существенным запаздыванием и характеризуются значительными возмущениями. Использование одноконтурных систем при автоматизации таких объектов не позволяет обеспечить высокого качества регулирования. Поэтому для повышения качества регулирования этих объектов используют более сложные АСР.
Каскадные АСР
В каскадных системах при регулировании основной технологической величины в объекте с большим запаздыванием используются также вспомогательные величины, реагирующие на изменение основных возмущений объекта и регулирующего воздействия с меньшим запаздыванием. В таких случаях стабилизация вспомогательных величин способствует более качественному регулированию основной величины. Каскадная система состоит из нескольких контуров регулирования, каждый из которых регулирует свою технологическую (основную или вспомогательную) величину. Однако применение каскадных схем эффективно только в том случае, когда запаздывание в контуре регулирования основной величины существенно больше, чем в контуре регулирования вспомогательной величины. При автоматизации химико-технологических объектов чаще всего используют двухконтурные каскадные системы.
Структурная схема двухконтурной системы приведена на рисунке 76. В объекте регулирования ОР на основную у и вспомогательную у1 технологические величины воздействуют регулирующая величина х и основное (наиболее сильное и быстро изменяющееся) возмущение z1. На величину у действует также небольшое и редкое возмущение z. Двухконтурная каскадная система имеет вспомогательный (стабилизирующий) контур регулирования и основной (корректирующий) контур. В стабилизирующий контур входит объект ОР (канал х → у1) и стабилизирующий регулятор AP1, вырабатывающий регулирующее воздействие х. Корректирующий контур регулирования состоит из объекта (канал х → у) и корректирующего регулятора АР с независимым заданием u. На вход регулятора АР поступает основная регулируемая величина у, а на вход регулятора AP1 - вспомогательная величина у1. Выходная величина х1 регулятора АР направляется на регулятор AP1 для изменения его задания. Стабилизирующий контур предназначен для регулирования вспомогательной величины у1, а корректирующий - основной величины у.
Обычно применяют следующие типы каскадных АСР: П - ПИ, ПИ - ПИ, ПИ - ПИД (первый регулятор является стабилизирующим, а второй - корректирующим).
Возмущение z1 приводит к изменению сначала вспомогательной величины y1, а затем — основной величины у. Поэтому стабилизирующий контур регулирования быстрее, чем корректирующий, вступит в работу и выработает регулирующее воздействие, которое частично скомпенсирует отклонение величины у от заданного значения u. Не скомпенсированное отклонение величины у приведет в действие корректирующий контур регулирования, который постепенно скомпенсирует это отклонение. Влияние возмущения z на величину у подавляется корректирующим контуром регулирования. При этом стабилизирующий контур регулирования является быстродействующим, а корректирующий — медленнодействующим. Таким образом, применение стабилизирующего контура регулирования приводит к значительному повышению качества регулирования основной технологической величины.

Рисунок 76.
В одном и другом случаях переходные процессы носят колебательный характер и не имеют статической ошибки регулирования. В то же время при использовании каскадной системы динамическая ошибка и время регулирования имеют меньшие значения. Уменьшается в несколько раз и интегральная квадратичная ошибка регулирования.
Структурная схема двухконтурной каскадной системы:
ОР - объект регулирования; АР - корректирующий регулятор; AP1 - стабилизирующий регулятор (рисунок 76).
Отметим, что качество регулирования существенно улучшается с уменьшением соотношения времени запаздывания в стабилизирующем
(  ) и корректирующем (
) и корректирующем (  ) контурах. Поэтому, если есть возможность выбора вспомогательной величины, то предпочтение следует отдать той, при которой запаздывание в стабилизирующем контуре будет минимальным.
) контурах. Поэтому, если есть возможность выбора вспомогательной величины, то предпочтение следует отдать той, при которой запаздывание в стабилизирующем контуре будет минимальным.
При реализации каскадных систем следует учитывать, что у многих объектов область технологически допустимых значений вспомогательной регулируемой величины у1, которая задается корректирующим регулятором, ограничена и поэтому в схему необходимо вводить устройства для ограничения величины задания стабилизирующего регулятора.
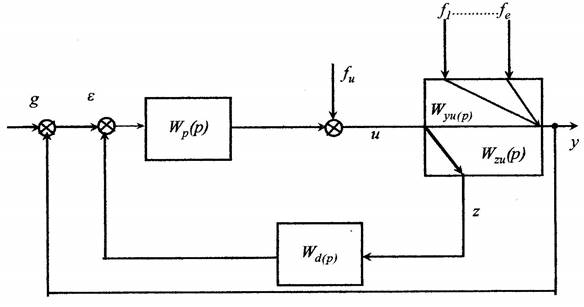
Рисунок 77
Переходные процессы в каскадной ПИД - ПИ системе и одноконтурной ПИ системе при одинаковом ступенчатом возмущении z1.
Автоматизация основных
Дата добавления: 2018-05-12; просмотров: 1060; Мы поможем в написании вашей работы! |

Мы поможем в написании ваших работ!