III. Автоматические регуляторы
Качество АСР в значительной степени определяется тем, какие принципы реализованы в системе. Принцип регулирования определяет способ формирования управляющего воздействия в АСР.
Современные системы АР конструируются исходя из следующих трех принципов.
1 – регулирование по отклонению регулируемой величины от заданного значения (принцип Ползунова – Уатта или принцип регулирования по отклонению), регулирование по возмущению (по нагрузке), комбинированное регулирование.
Во первых, упомянем, что сами понятия П, ПД, ПИ, ПИД (P, PD, PI, PID) регуляторы являются неким сокращением от понятия: "устройство регулирования (черный ящик) обеспечивающие на своем выходе обратную связь регулируемого параметра, или его изменения, описываемую передаточной функцией типа П, ПИ и т.д....... ". При этом:
П, (P) - означает "пропорциональный"
И(I) - "интегральный"
Д(D) - "дифференциальный"
ПИ (PI) - "пропорциональный и интегральный"
ПД (PD) - "пропорциональный и дифференциальный"
ПИД (PID) - "пропорциональный, интегральный и дифференциальный"
Очень важное замечание - в подавляющем большинстве случаев эти регуляторы обеспечивают отрицательную обратную связьизменения регулируемого параметра на регулирующий параметр (воздействие).
Задача проектировщика состоит в выборе такого типа регулятора, который при минимальной стоимости и максимальной надежности обеспечивал бы заданное качество регулирования.
Разработчиком могут быть выбраны релейные, непрерывные или дискретные (цифровые) типы регуляторов.
Для того, чтобы выбрать тип регулятора и определить его настройки необходимо знать:
1. Статические и динамические характеристики объекта управления.
2. Требования к качеству процесса регулирования.
3. Показатели качества регулирования для серийных регуляторов.
4. Характер возмущений, действующих на процесс регулирования.
Выбор типа регулятора обычно начинается с простейших двухпозиционных регуляторов и может заканчиваться самонастраивающимися микропроцессорными регуляторами. Замечу, что по требованиям технологического регламента многие объекты не допускают применения релейного управляющего воздействия.
Всего существует не так много типов регуляторов которые применяют для управления технологическими процессами всего их три, а именно П, ПИ, ПИД, есть и другие типы но их применение скорее исключение чем правило. Все регуляторы отличаются по своим характеристикам и сложности реализации. Коротко о плюсах, минусах и применении каждого из них:
П - пропорциональный регулятор.
Принцип действия заключается в том, что регулятор вырабатывает управляющее воздействие на объект управления пропорционально величине ошибки.
П - регулятор - это регулятор, реализующий простейший пропорциональный закон регулирования.
У П –регулятора выходная величина в пределах зоны регулирования изменяется пропорционально изменению входной величины.
Уравнение динамики П –регулятора:
 y(60),
y(60),
где  – коэффициент передачи (пропорциональности) регулятора.
– коэффициент передачи (пропорциональности) регулятора.
У данного регулятора на выходе формируется управляющее воздействие пропорциональное сигналу ошибки:
 (61)
(61)
Или в операторном виде:
 (62)
(62)
Передаточная функция П –регулятора:
 (63)
(63)
С увеличением  статическая ошибка уменьшается, однако при этом уменьшается и устойчивость системы. Поэтому при выборе значения следует учитывать эти оба обстоятельства. Достоинство П –регуляторов - простота и быстродействие, а так же малая динамическая ошибка в начале переходного процесса. САУ с таким регулятором обладают устойчивостью. Недостаток П –регуляторов – установившаяся статическая ошибка, приводящая к остаточному отклонению регулируемого параметра.
статическая ошибка уменьшается, однако при этом уменьшается и устойчивость системы. Поэтому при выборе значения следует учитывать эти оба обстоятельства. Достоинство П –регуляторов - простота и быстродействие, а так же малая динамическая ошибка в начале переходного процесса. САУ с таким регулятором обладают устойчивостью. Недостаток П –регуляторов – установившаяся статическая ошибка, приводящая к остаточному отклонению регулируемого параметра.
Параметром настройки П –регулятора является зона регулирования, или предел пропорциональности  , под которым понимают диапазон изменения входной величины регулятора, выраженный в процентах от максимального интервала, в пределах которого изменение входной величины приводит к изменению выходной величины регулятора от одного крайнего значения до другого.
, под которым понимают диапазон изменения входной величины регулятора, выраженный в процентах от максимального интервала, в пределах которого изменение входной величины приводит к изменению выходной величины регулятора от одного крайнего значения до другого.
Значение пределов пропорциональности может изменяться и устанавливаться в широких пределах, от двух до нескольких тысяч процентов. На рисунке 58 приведено семейство статических характеристик П –регулятора при разных значениях . При =100% изменению входной величины регулятора y на 1% диапазона ее изменения соответствует изменение выходной величины х на 1% диапазона ее изменения.
При крутой статической характеристике (  100%) пропорциональная зависимость между величинами x и y наблюдается только внутри границ предела пропорциональности. Значениям параметра за границами предела пропорциональности соответствуют либо максимальное, либо минимальное значения х. При =0% П –регулятор работает как двухпозиционный. Если
100%) пропорциональная зависимость между величинами x и y наблюдается только внутри границ предела пропорциональности. Значениям параметра за границами предела пропорциональности соответствуют либо максимальное, либо минимальное значения х. При =0% П –регулятор работает как двухпозиционный. Если  100% полное изменение входного сигнала приводит к частичному изменению величины х. Последняя не достигает ни одного крайнего значения. При
100% полное изменение входного сигнала приводит к частичному изменению величины х. Последняя не достигает ни одного крайнего значения. При  изменение входа y вообще не приводит к изменению выходной величины. Таким образом, степень влияния входной величины П –регулятора на выходную возрастает с уменьшением значения предела пропорциональности.
изменение входа y вообще не приводит к изменению выходной величины. Таким образом, степень влияния входной величины П –регулятора на выходную возрастает с уменьшением значения предела пропорциональности.
 (64)
(64)

Рисунок 58
В динамическом отношении П –регулятор представляет собой усилительное звено. Переходная характеристика П –регулятора определяется выражением:
 (65)
(65)
Вид переходной характеристики приведен на рисунке 59

Рисунок 59
Таким образом, П – регулятор просто усиливает сигнал ошибки в некоторое число раз. Важность П – регулятора определяется тем, что в САР, где он используется, изменяя его коэффициент усиления, можно не только добиться устойчивости САР, но и оптимизируя значение этого коэффициента оптимизировать и качество всей САР. Однако, получить требуемые или просто хорошие показатели качества САР с помощью одного только П - регулятора не удается.
Параметрами настройки П-регулятора являются коэффициент усиления Кр и рабочая точка Y0 (рисунок 60). Рабочая точка Y0 определяется как значение выходного сигнала, при котором рассогласование регулируемой величины равно нулю. При влиянии возмущающих воздействий возникает, в зависимости от Y0, отклонение регулирования.

Рисунок 60
Чем больше Кр, тем круче статическая характеристика, тем меньше статическая погрешность (рисунок 61). При Кр=0 (линия 0) отклонение текущего значения параметра от заданного значения не вызывает никакого перемещения затвора регулирующего органа. Это равносильно отсутствию регулятора, и возмущение компенсировано быть не может. При Кр=∞ (линия 3) п-регулятор не давал бы статической погрешности (ε∞=0). Практически такой регулятор реализовать нельзя. Коэффициент усиления регулятора не должен превышать некоторого максимального допустимого значения.
Отсюда следует, что избавиться от недостатка, присущего пропорциональному закону – статической погрешности – принципиально невозможно. Можно уменьшить статическую ошибку регулирования, увеличивая Кр .
С увеличением Крстатическая ошибка (после отработки входного воздействия новое установившееся значение параметра всегда отличается от заданного) уменьшается. Однако при этом уменьшается и устойчивость системы. Поэтому при выборе значения Кр следует учитывать оба обстоятельства.

Рисунок 61
Статические характеристики: допустим, что для компенсации некоторого возмущающего воздействия требуется некоторое управляющее воздействие. Для его формирования П-регулятору необходимо, чтобы регулируемый параметр принял новое значение. Это значение должно отличаться от заданного, на некоторую величину - величину статической погрешности ε∞ (рисунок 62).

Рисунок 62
Пропорциональный регулятор воздействует на рабочий орган тем сильнее, чем больше отклонение регулируемого параметра от заданного значения.
Если на вход П -регулятора подать гармонические колебания, то выходная величина его изменяется по гармоническому закону без запаздывания. Амплитуда выходных колебаний в Кр раз отличается от амплитуды входных колебаний.
П -регуляторы могут применяться для управления объектами с самовыравниванием и без самовыравнивания при небольших изменениях нагрузок, если технологическим режимом допустимо остаточное отклонение параметра от заданного значения (статическая ошибка).
ДостоинствоП – регуляторов – простота и быстродействие, а так же малая динамическая ошибка в начале переходного процесса. САУ с таким регулятором обладают устойчивостью.
Недостаток – установившаяся статистическая ошибка, приводящая к остаточному отклонению регулируемого параметра.
Интегральный закон регулирования (И -регулятор) - это регулирование, когда величина поправки в регулирующее воздействие зависит от накопленного действия отклонения регулируемой величины. Рассмотрим пример:-если в комнате низкая температура недопустима, ибо на подоконнике находятся ценные теплолюбивые кактусы, а кто-то открыл окно зимой, то пропорциональное регулирование в силу разумности своих настроек попросту не позволяет прогреть комнату. Если накопленное действие пониженной температуры растет (интеграл от изменения), то это слагаемое даст дополнительное приращение мощности нагревателя.
Управляющее воздействие, формируемое интегральным регулятором, пропорционально интегралу по времени от ошибки регулирования
 (65),
(65),
где  – коэффициент передачи (усиления) И – регулятора;
– коэффициент передачи (усиления) И – регулятора;
 - постоянная времени интегрирования, которая является настроечным параметром.
- постоянная времени интегрирования, которая является настроечным параметром.
Постоянная времени интегрирования – это время, в течение которого с момента поступления на входе регулятора постоянного воздействия  =constсигнал на выходе регулятора достигнет значения, равного значению входного сигнала . С увеличением времени интегрирования воздействие входной величины регулятора на выходную ослабевает.
=constсигнал на выходе регулятора достигнет значения, равного значению входного сигнала . С увеличением времени интегрирования воздействие входной величины регулятора на выходную ослабевает.
И – регулятор имеет передаточную функцию:
 (66)
(66)
c управляющим воздействием пропорциональным интегралу сигнала ошибки
 =
=  (67)
(67)
Переходная характеристика И -регулятора имеет вид:
 (68)
(68)
Это уравнение наклонной прямой (68). Переходные характеристики при двух различных значениях времени интегрирования приведены на рисунке 63, из которого видно, что угол наклона не изменяется во времени. Для нахождения времени интегрирования по переходной характеристике, на поле чертежа наносят единичное ступенчатое изменение величины в том же масштабе. Координата точки пересечения этих характеристик по оси абсцисс определяет величину времени интегрирования.

Рисунок 63
Регуляторы с таким законом управления воздействуют на ОУ пропорционально интегралу от отклонения регулируемой величины. Тем самым устраняется статическая ошибка, свойственная П – регуляторам. Вместе с тем И – регуляторам присуща большая динамическая ошибка и невысокое быстродействие, особенно в начале переходного процесса: в начальный момент входного воздействия И – регулятор вследствие своих инерционных свойств не успевает выработать достаточный управляющий сигнал. С увеличением коэффициента передачи уменьшаются динамическая ошибка, время регулирования, но при этом уменьшается и устойчивость САУ.
И –регуляторы используют в тех случаях, когда условиями эксплуатации допускаются большие динамическая ошибка и время регулирования, и не допускается статическая ошибка. Их устанавливают на объектах с малым запаздыванием и плавным изменением возмущающих воздействий.
С технологической точки зрения И –регулятор формирует воздействие на рабочий орган, которое линейно возрастает или убывает до тех пор, пока регулируемый параметр не вернется к заданному значению. Эти регуляторы просты в реализации, но их нельзя применять на объектах без самовыравнивания, так как процесс регулирования носит колебательный характер и система может оказаться неустойчивой. Поскольку быстродействие И -регулятора невелико, самовыравнивание объекта должно быть значительным, запаздывание небольшим, а изменение нагрузок плавным.
ПИ - пропорционально-интегральный регуляторявляется одним из наиболее универсальных регуляторов. Фактически ПИ-регулятор – это П-регулятор с дополнительной интегральной составляющей. И-составляющая, дополняющая алгоритм, в первую очередь нужна для устранения статической ошибки, которая характерна для пропорционального регулятора. По сути, интегральная часть является накопительной, и таким образом позволяет осуществить то, что ПИ-регулятор учитывает в данный момент времени предыдущую историю изменения входной величины.
ПИ –регулятор реализует закон регулирования, который записывается так:
 (69)
(69)
При отклонении регулируемой величины от заданного значения ПИ-регулятор сразу же изменяет управляющее воздействие пропорционально отклонению регулируемой величины от заданного значения (пропорциональная составляющая), а потом постепенно увеличивает управляющее воздействие за счет интегральной составляющей. То есть он воздействует на ОУ пропорционально отклонению регулируемой величины и интегралу этого отклонения. ПИ –регулятор имеет передаточную функцию следующего вида:
 (70)
(70)
Как следует из формулы (69) ПИ –регулятор можно получить, если соединить параллельно два регулятора: пропорциональный, с передаточной функцией  и интегральный, с передаточной функцией
и интегральный, с передаточной функцией  (рисунок 64)
(рисунок 64)

Рисунок 64
Управляющее воздействие можно записать исходя из того, что оно пропорционально как самому сигналу ошибки, так и его интегралу:
 (71)
(71)
Уравнение динамики ПИ –регулятора имеет вид:
 (72)
(72)
где – коэффициент передачи регулятора, а  – время интегрирования. Коэффициент передачи и время интегрирования являются параметрами настройки ПИ – регулятора. Пропорциональная составляющая настраивается с помощью предела пропорциональности , а интегральная – посредством изменения времени интегрирования. Воздействие входной величины на выходную повышается с уменьшением предела пропорциональности и уменьшением времени интегрирования. Переходная характеристика ПИ –регулятора описывается зависимостью:
– время интегрирования. Коэффициент передачи и время интегрирования являются параметрами настройки ПИ – регулятора. Пропорциональная составляющая настраивается с помощью предела пропорциональности , а интегральная – посредством изменения времени интегрирования. Воздействие входной величины на выходную повышается с уменьшением предела пропорциональности и уменьшением времени интегрирования. Переходная характеристика ПИ –регулятора описывается зависимостью:
 (73)
(73)
На рисунке 65 приведена переходная характеристика ПИ –регулятора.

Рисунок 65
ПИ –регулятор обладает преимуществами П – и И –регуляторов, т.е. быстро реагирует на изменение нагрузки (П – составляющая) и работает без статической ошибки (И – составляющая). В случае отказа канала регулирования с интегральной составляющей ПИ –регулятор будет работать как П –регулятор, что повышает надежность его работы. ПИ –регуляторы устанавливают на объекты со значительным запаздыванием при возмущающих воздействиях, изменяющихся с большой частотой в широких пределах.
Передаточная функция ПИ –регулятора представлена на рисунке 66

Рисунок 66
С технологической точки зрения ПИ –регулирование выглядит так: рабочий орган воспринимает суммарное воздействие, благодаря чему достигается высокое быстродействие, обеспечивается устойчивость регулирования и отсутствует статическая погрешность.
Промышленные ПИ –регуляторы обычно составляются в соответствии со структурными схемами, приведенными на рисунке 67, где в случае 67(а) схема содержит два параллельно соединенных звена:
усилительное и интегрирующее (графиком является 1 линия). Передаточная функция такой системы находится из равенства:
 (74)
(74)
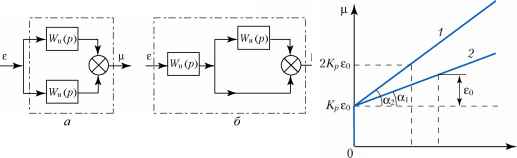
Рисунок 67
Структурная схема, показанная на рисунке 67(б), состоящая из таких же звеньев, но с другим распределением сигнала (линия 2), учитывающим статическую и астатическую погрешность.
Плюсы:прост в реализации и настройке.
Минусы: выход на заданный параметр затянут.
Применяется во многих промышленных устройствах, где надо точно удерживать параметр, который не меняет свое значение мгновенно даже с мгновенным изменением внешней среды. Например температура не может измениться мгновенно, поскольку существует теплоемкость, к тому же сам датчик также не может моментально изменить свою температуру. Давление жидкостей тоже не может мгновенно изменится, поэтому применение ПИ регуляторов для удержания давления вполне оправданно.
Пропорционально-дифференциальный закон регулирования (ПД-регулятор). Качество регулирования можно повысить вводя в закон регулирования первую производную (скорость изменения) входной величины регулятора, т.е. Д-составляющую.
Уравнение динамики ПД –регулятора:
 (75)
(75)
где, – коэффициент передачи регулятора,  – время дифференцирования (отрезок времени, на который выходная величина опережает его пропорциональную составляющую при изменении входной величины с постоянной скоростью и при условии, что коэффициент передачи регулятора равен единице).
– время дифференцирования (отрезок времени, на который выходная величина опережает его пропорциональную составляющую при изменении входной величины с постоянной скоростью и при условии, что коэффициент передачи регулятора равен единице).
ПД –регулятор имеет два параметра настройки: предел пропорциональности и время дифференцирования . При наличии Д-составляющей выходная величина регулятора х изменяется с некоторым опережением относительно входной величины, пропорциональным скорости ее изменения.
При наличии в законе регулирования Д –составляющей регулятор реагирует и на изменения скорости входной величины, т.е. на интенсивность ее изменения. Такой регулятор вступает в работу быстрее, чем П –регулятор. Введение в закон регулирования воздействия по производной приводит к усилению влияния регулятора на переходный процесс, при этом сокращается время переходного процесса и уменьшаются колебания регулируемой величины. Переходная характеристика (рисунок 68) отличается от переходной характеристики П –регулятора большим изменением выходной величины сразу после изменения входной.

Рисунок 68
Передаточная функция:
 (76)
(76)
Так как управляющее воздействие пропорционально как самому сигналу ошибки, так и его производной, то:
 (77)
(77)
Регулятор вносит в систему опережение по фазе, изменяющееся от нуля при низких частотах и до +π/2 при высоких. Следовательно, Д-составляющая улучшает качество регулирования, уменьшая фазовое запаздывание САУ в целом на +π/2 рад. Благодаря этому при регулировании достигается эффект упреждения. ПД -регуляторы обеспечивают относительно высокое качество регулирования объектов, обладающих переходным запаздыванием (например: теплообменных и массообменных аппаратов), а так же в тех случаях, когда нагрузка в объектах регулирования изменяется часто и быстро. Недостатком ПД –регулятора является невозможность обеспечения высокой точности регулирования.
ПИД - пропорционально-интегрально-дифференциальный регулятор.
ПИД-регулятор – самый сбалансированный из всех регуляторов, построенных на основе типовых звеньев, поэтому широко применяется в различных сферах.
По сути, данное устройство это эволюция ПИ-регулятора.
Пропорциональная составляющая вырабатывает сигнал, который противодействует отклонению регулируемой величины в данный момент времени (идеология чисто П-регулятора).
Интегральная составляющая накапливает результирующее значение, нивелируя, таким образом, недостаток П-регулятора – наличие статической ошибки.
ПИД-регулятор обладает Д-составляющей, которая как бы прогнозирует отклонение от задания и следит за скоростью отклонения, поэтому является самой быстрой в данном алгоритме. По сути, это является преимуществом и недостатком одновременно. Это все стоит учитывать при выборе закона регулирования.
Уравнение динамики ПИД –регулятора:
 (78)
(78)
Так как ПИД-закон включает в себя три вида управляющих воздействий, то

Передаточная функция выглядит следующим образом:
 (79)
(79)
Коэффициенты  , входящие в передаточные функции типовых регуляторов подлежат настройке при наладке САУ и являются настроечными.
, входящие в передаточные функции типовых регуляторов подлежат настройке при наладке САУ и являются настроечными.
ПИД –регулятор имеет три параметра настройки: предел пропорциональности, время интегрирования и время дифференцирования. Воздействие входной величины этих регуляторов на выходную повышается с уменьшением предела пропорциональности, уменьшением времени интегрирования и увеличением времени дифференцирования.
На рисунке 69 показан принцип работы ПИД –регулятора.

Рисунок 69
В начальный момент времени ПИД регулятор оказывает на ОУ регулирующее воздействие пропорционально скорости изменения, которая затем уменьшается до значения, определяемого П –составляющей. После этого начинает влиять И –составляющая.. Таким образом ПИД –регулятор оказывает на ОУ регулирующее воздействие, которое позволяет ускорить процесс регулирования (рисунок 70).

Рисунок 70
ПИД –регулятор обладает еще одним положительным качеством – реакцией на скорость изменения нагрузки, что повышает качество технологического процесса. Такой регулятор устанавливают на объектах со скачкообразной, нечасто изменяющейся нагрузкой.
На рисунке 71 представлена передаточная функция ПИД –регулятора.

Рисунок 71
ПИД -регуляторы обеспечивают высокое качество регулирования объектов, обладающих переходным запаздыванием (например, теплообменных и массообменных аппаратов).
Плюсы:наилучшая переходная характеристика. Отличная скорость и точность регулирования.
Минусы:сложен в реализации и настройке ,современные ПИД регуляторы реализовываются с применением вычислительных процессоров; выход на заданный параметр затянут.
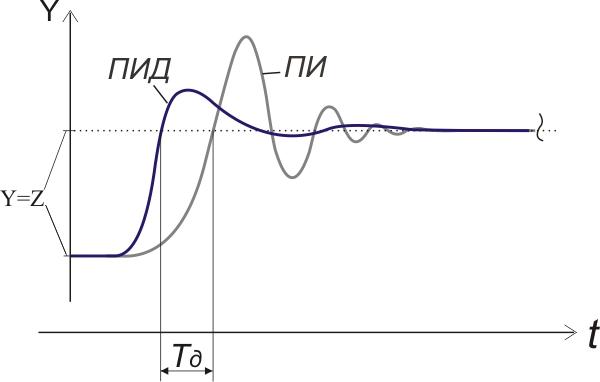
Рисунок 72
Релейное регулирование
Релейные системы автоматического регулирования относятся к категории систем регулирования прерывистого действия. По своему принципу действия релейные системы вследствие нелинейной характеристики релейных элементов являются нелинейными системами. В релейных системах замыкание и размыкание цепи регулирования происходит в зависимости от значения регулируемой величины. Эти моменты времени заранее не известны и поэтому не могут быть заданы извне.
Релейные системы автоматического регулирования можно разделить на релейные астатические и позиционные. В астатических прерывистых релейных системах контур обратной связи периодически замыкается и размыкается с помощью реле. Позиционные регуляторы обеспечивают перемещение регулирующего органа в одно из фиксированных положений или позиций. По количеству возможных позиций различают двух-, трех-, и многопозиционные . Автоматические регуляторы, у которых при непрерывном изменении входной величины регулирующий орган занимает ограниченное число определенных, заранее известных, положений называютсяпозиционными.Входной величиной позиционного регулятора является рассогласование ε между заданным узд и текущим у значениями регулируемой величины (ε= узд-у). Выходной величиной является управляющее воздействие.
Наиболее часто употребляются регуляторы с релейной статической характеристикой: двухпозиционный и трехпозиционный.
Дата добавления: 2018-05-12; просмотров: 7893; Мы поможем в написании вашей работы! |

Мы поможем в написании ваших работ!