Регулирование координат асинхронного двигателя с помощью резисторов
Данный способ регулирования координат, называемый часто реостатным, осуществляется введением добавочных активных резисторов в статорные или роторные цепи АД (см. рис. 12.1).Он привлекателен простотой своей реализации, но имеет в то же время невысокие показатели качества регулирования и экономичности.
Включение добавочных резисторов R в цепь статораприменяется главным образом для регулирования (ограничения) в переходных процессах тока и момента АД с короткозамкнутым ротором. (Рис.12.1.б) Этот способ нашел применение лишь для ограничения тока при пуске асинхронных двигателей с короткозамкнутым ротором.
Включение добавочных резисторов R2Д в цепь ротора(см. схему рис. 12.1, а)применяется как с целью регулирования тока и момента АД с фазным ротором, так и для регулирования его скорости.
Искусственные механические характеристики при включении добавочных сопротивлений в цепь ротора имеют вид, приведенный на рисунке 12.3. и могут использоваться для регулирования (ограничения) пускового тока и скорости электропривода
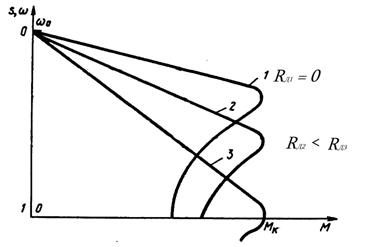
Рис. 12.3. Механические характеристики электропривода с добавочными резисторами, включенными в цепь ротора.
Анализ данных характеристик показывает, что скорость идеального холостого хода АД и его максимальный (критический) момент остаются неизменными при регулировании R2д, а критическое скольжение, изменяется пропорционально сопротивлению этого резистора.
Выполненный анализ позволяет сделать вывод о том, что за счет изменения R2Д можно повышать пусковой момент АД вплоть до критического значения Мк при одновременном снижении пускового тока. Это позволяет сохранить перегрузочную способность двигателя, что весьма важно при регулировании его скорости.
12.5.Расчет резисторов в цепи ротора.
Обычно требуется определить сопротивление дополнительного резистора R2д, при включении которого АД будет иметь заданную искусственную характеристику или же она будет проходить через заданную точку с координатами (ωи, Ми). При этом предполагается, что естественная механическая характеристика АД известна (рассчитана или снята экспериментально), а требуемая искусственная характеристика задана по условиям пуска или регулирования скорости.
Расчет сопротивления добавочного резистора R2д может быть выполнен следующим способом.
Если искусственная характеристика задана полностью и определена точка критического момента (например, характеристика 2 на рис. 12.4), то в этом случае расчет основывается на формуле, с помощью которой находится отношение критических скольжений АД на естественной 1 и искусственной 2 характеристиках:
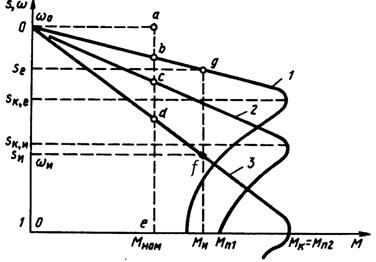
Рис. 12.4. К расчету добавочных сопротивлений в цепи ротора.
где Rp - сопротивление фазы обмотки ротора АД.
Из данной формулы определим искомое значение добавочного сопротивления R2Д1
Формула справедлива не только для критического момента МK, но и для любого фиксированного момента Мн.
Таким образом, если задана некоторая точка f искусственной характеристики 3 (см. рис. 12.4.) с координатами Ми, , sи, то искомое сопротивление резистора можно найти по формуле
где sе - скольжение АД на естественной характеристике 1, соответствующее моменту Ми.
Задача12.1 Для АД типа МТН-312-6 с техническими данными
Рном = 17,5 кВт
n ном = 945об/мин;
U ном= 380В;
f = 50Гц;
I1ном = 43 А;
Rp= 0,89 Ом;
(естественная механическая характеристика представлена на рис.12.5.кривая 1)
Рассчитать добавочное сопротивление R2Д, при включении которого в цепь ротора механическая характеристика пройдет через точку с координатами ωи = 0,6 ωном,
Ми = 0,9Мном.
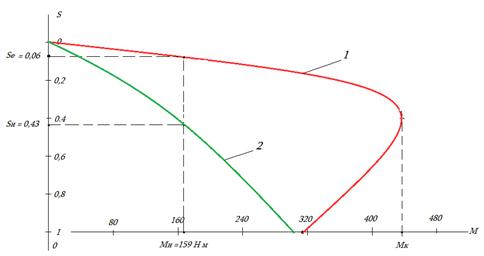
Рис.12.5. К задаче 12.1
1.Определим координаты точек номинального режима:
2.Рассчитаем координаты заданной точки, используя координаты номинальной точки
и нанесем ее на плоскость механических характеристик (см. рис. 12.5).
Для момента Ми = 159 Н-м определим скольжение se при работе АД на естественной характеристике 1, которое оказывается равным 0,06.
По формуле определим требуемое добавочное сопротивление:

Дата добавления: 2018-05-12; просмотров: 1430; Мы поможем в написании вашей работы! |

Мы поможем в написании ваших работ!