Электропривод с механическим дифференциалом.
Одним из видов взаимосвязанных ЭП являются двухдвигательные приводы с механическим дифференциалом, которые находят применение в металлургическом производстве, крановых механизмах, установках бурения нефтяных скважин, горных и строительных машинах.
Их распространение объясняется следующими ценными свойствами:
- возможностью ограничения нагрузок привода при стопорении движения исполнительного органа рабочей машины;
- возможностью получения большого диапазона регулирования скорости привода при относительно небольшом диапазоне регулирования скорости одного из двигателей;
- наличием автоматического распределения нагрузки между двигателями, а следовательно, отсутствием перегрузки одного двигателя при выходе другого из строя, малым падением скорости при приложении нагрузки.
В распространенной схеме ЭП с механическим дифференциалом (рис. 16.1) двигатели 1 и 6 приводят во вращение со скоростями (ω1и ω2 шестерни 2 и 5, по которым обкатываются шестерни 4, называемые сателлитами. Вращение сателлитов 4 приводит к вращению жестко связанной с ними выходной шестерни 3, от которой движение через дополнительную шестерню 8 передается исполнительному органу 7 рабочей машины.

Рис.16.1. Схема электропривода с механическим дифференциалом
1 и 6 – электродвигатели
2 и 5 – шестерни
4 – шестерни – сателлиты.
3 – выходная шестерня
|
|
|
7 – исполнительный орган
8 – дополнительная шестерня
Движение исполнительного органа в общем случае может осуществляться либо от одного двигателя, либо от двух.
При работе одного из двигателей при неподвижном (заторможенном) другом приведенная схема будет соответствовать схеме обычного однодвигательного ЭП, в котором скорость выходной шестерни 3 будет определяться скоростью работающего (вращающегося) двигателя
В случае работы двух двигателей (основной режим) выходная скорость ЭП определяется значениями и направлением скоростей ω1и ω2
При одинаковых диаметрах шестерен 2,5 и 4 скорость вращения сателлитов 4 относительно вертикальной оси определяется выражением

а угловая скорость шестерни 3 при этом

Если пренебречь потерями момента на преодоление сил трения в дифференциале, то момент на шестерне 3 определится суммой моментов двигателей 1 и 6, равных по значению в установившемся режиме:

Для примера на рис. 16.2. показаны характеристики ЭП 1 и 3 при прямолинейных характеристиках двигателей.
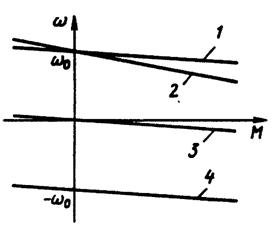
Рис.16.2. Характеристики ЭП и электродвигателей.
В случае идентичности механических характеристик 2 обоих двигателей и одинаковом направлении их вращения характеристика ЭП 1 имеет вдвое более высокую жесткость по сравнению с характеристиками двигателей, что следует также из формулы При вращении одного из двигателей в противоположном направлении (характеристика 4) ЭП будет иметь характеристику 3, являющуюся характеристикой динамического торможения. Используя другие искусственные характеристики двигателей, можно формировать различные искусственные характеристики ЭП с дифференциалом.
|
|
|
Дата добавления: 2018-05-12; просмотров: 927; Мы поможем в написании вашей работы! |

Мы поможем в написании ваших работ!