Схема включения и характеристики двигателя постоянного тока независимого возбуждения.
Основная схема включения ДПТНВ представлена на рис. 10.1.
На схеме обозначены:
I – ток в цепи обмотки якоря, А.
Iв - ток в обмотке возбуждения, А.
Е- ЭДС якоря, В.
ω - угловая скорость двигателя, рад/с,
М - момент двигателя, Н-м, ;
Rя - сопротивление якоря, Ом;
Rов - сопротивление обмотки возбуждения (ОВ), Ом;
Lя – индуктивность якоря, Гн.
Lов- индуктивность обмотки возбуждения, Гн.
Rд – добавочное сопротивление в цепи обмотки якоря, Ом.
Rв – добавочное сопротивление в цепи обмотки возбуждения, Ом.
U – напряжение питания обмотки якоря, В.
Uв – напряжение питания обмотки возбуждения, В.

Рис.10.1. Схема включения двигателя постоянного тока независимого возбуждения.
Для данной схемы уравнения напряжения, ЭДС якоря и электромагнитного момента имеют вид:

Где: R = Rя + Rд – полное сопротивление цепи якоря, Ом.
Ф – магнитный поток, Вб.
U – подводимое к якорю напряжение, В.
k – конструктивный коэффициент двигателя.
Подставляя первую формулу во вторую, получим формулу для электромеханической характеристики ω (I):
используя третью формулу, получим выражение для механической характеристики, ω(М):
В соответствии с данными формулами электромеханическая и механическая характеристики ДПТНВ представляют собой линейные зависимости угловой скорости (далее скорости) от тока и момента, вид которых при положительном значении питающего напряжения и kФ = const приведен на рис. 10.2. Так как электромеханическая и механическая характеристики ДПТНВ совпадают. на рисунке они изображены одной линией.
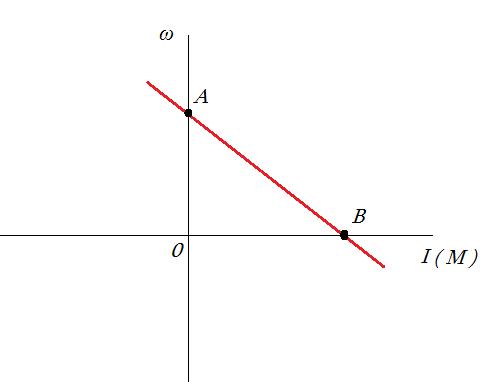
Рис.10.2. Электромеханическая и механическая характеристики ДПТНВ.
Характерными точками характеристики являются точка А, которая называется точкой холостого хода,
В этой точке характеристики частота вращения двигателя равна частоте вращения холостого хода ω = ω0, а ток двигателя и его момент равны нулю ( I = М = 0).
и точка В, которая называется точкой короткого замыкания, где ω = 0,
а I = I к.з , М = Mкз.
В данном случае, режим короткого замыкания для электрической машины соответствует неподвижному состоянию якоря при поданном на двигатель напряжении, а не замыканию его электрических цепей между собой или на корпус. Режим короткого замыкания называется также пусковым режимом, поскольку является начальным при включении (пуске) двигателя.
выведенные формулы позволяют назвать основные способы реализации искусственных характеристик ДПТНВ, используемых для регулирования координат ЭП.
К ним относятся:
· изменение сопротивления добавочного резистора Rд в цепи якоря
· изменение магнитного потока Ф
· изменение подводимого к якорю напряжения U.
Задача 10.1.:
Рассчитать и построить естественные характеристики ДПТНВ. используя следующие его паспортные (номинальные) данные:
Р ном = 300 кВт;
U ном = 440 В,
n ном=1250 об/мин;
I ном =750 А.
Для построения характеристик, представляющих собой прямые линии, достаточно рассчитать координаты двух точек: номинального режима и холостого хода.
Найдем номинальные скорость и момент двигателя:


Из формулы  , определим значение kФ:
, определим значение kФ:

Определим скорость идеального холостого хода
По координатам точек холостого хода (ω = ω0, I = М = 0) и номинального режима (ω = ωном, I =I ном, М =M ном) построим естественные электромеханическую ω (I):
и механическую ω(М) характеристики. (см. рис.10.3)
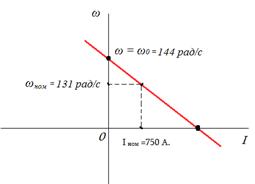

Рис.10.3. Электромеханическая и механическая характеристики к задаче 10.1.
Дата добавления: 2018-05-12; просмотров: 430; Мы поможем в написании вашей работы! |

Мы поможем в написании ваших работ!