Занятие 11 (2 часа) Регулирование координат электропривода с двигателем постоянного тока независимого возбуждения изменением напряжения якоря
(система преобразователь – двигатель)
Схема и электромеханические характеристики электропривода с изменением напряжения якоря.
Данный способ широко используется для регулирования любых координат ЭП при высоких требованиях к показателям его качества. По этой причине до недавнего времени он являлся основным при создании регулируемых ЭП постоянного тока.
Реализация этого способа предусматривает питание якоря ДПТНВ от преобразователя, выходное напряжение которого регулируется по значению и может изменяться при необходимости по полярности.
Поскольку основным источником питания ЭП служит сеть переменного тока, то таким преобразователем является управляемый выпрямитель (УВ).
Схема ЭП при питании якоря двигателя от УВ, получившая название система УВ - Д, показана на рис. 11.1.
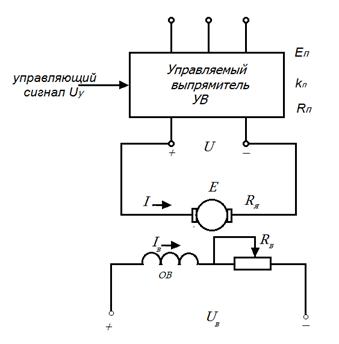
Рис.11.1. Схема электропривода при питании якоря двигателя от управляемого выпрямителя.
На рисунке:
Еп - ЭДС управляющего выпрямителя;
Rп - внутреннее сопротивление УВ;
kп - коэффициент усиления УВ.
Напряжение на выходе УВ вследствие наличия внутреннего сопротивления Rn определяется по формуле
Обмотка возбуждения ДПТНВ питается от отдельного источника постоянного тока, например от управляемого выпрямителя.
Формула для определения электромеханической характеристики :

Формула для определения механической характеристики :

Из формул видно, что при изменении ЕП пропорционально изменяется скорость идеального холостого хода ω0, поэтому характеристики при изменении ЕП перемещаются по вертикальной оси параллельно самим себе. (прямые 2….7).
Искусственные характеристики (прямые 2….7) имеют больший наклон, чем естественная характеристика ДПТНВ (прямая 1). Больший наклон искусственных характеристик объясняется наличием в цепи сопротивления резистора RП
При изменении полярности питающего напряжения характеристики переходят в область отрицательных значений угловой скорости. момента и тока. Это означает, что двигатель начинает вращаться в противоположном направлении, и ток в цепи также течет в другую сторону.
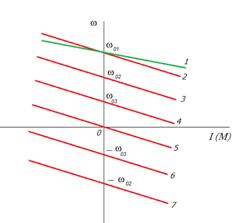
Рис.11.2. Семейство электромеханических (механических) характеристик при изменении ЭДС питания электропривода.
Управляемый выпрямитель чаше всего выполняется в виде электромашинной системы «генератор - двигатель» (Г - Д) или системы «тиристорный преобразователь - двигатель» (ТП - Д).
Система «генератор - двигатель».
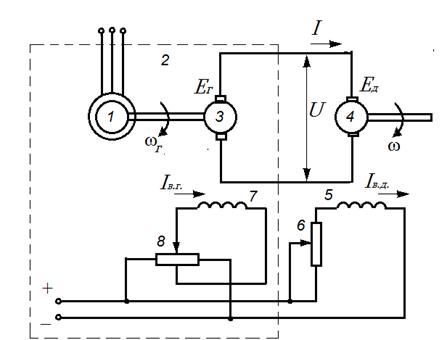
Рис.11.3. Схема электропривода по системе «Генератор – двигатель»
На рисунке:
1 – приводной электродвигатель переменного тока.
2 – электромашинный выпрямитель.
3 - генератор постоянного тока.
4 – двигатель электропривода.
5 - обмотка возбуждения двигателя привода
6 – резистор в цепи
7 – обмотка возбуждения двигателя генератора
8 – потенциометр в цепи возбуждения генератора.
В системе «Генератор – двигатель» якорь 4двигателя непосредственно присоединяется к якорю 3 генератора, образующего вместе с приводным двигателем 1 электромашинный выпрямитель 2 трехфазного переменного тока в постоянный, вращающийся со скоростью ω г . Регулирование напряжения на якоре двигателя происходит за счет изменения тока возбуждения генератора Iв.г. с помощью потенциометра 8. При этом изменяется ЭДС генератора Еги соответственно напряжение на якоре двигателя U.
Регулирование магнитного потока двигателя осуществляется изменением Iв.д., за счет включения в цепь обмотки 5возбуждения двигателя резистора 6. В замкнутых ЭП питание обмотки 7 возбуждения генератора происходит от регулируемого источника постоянного тока, например полупроводникового УВ.
Дата добавления: 2018-05-12; просмотров: 855; Мы поможем в написании вашей работы! |

Мы поможем в написании ваших работ!