Интерфейс программы. Второй экран-IN/OUT.

Рисунок 10. – экран IN/OUT
Данная вкладка представляет собой рабочее поле для отладки системы исправления и быстрого написания управляющих программ (Рисунок 10) при использовании внешних датчиков событий. Робот, в некоторых версиях системы управления, может считывать состояние 20 датчиков внешних событий и управлять состоянием 20 дискретных линий вывода. Это позволяет с особой легкостью интегрировать робота, используя его под собственные нужды. Развитая система команд условных и безусловных переходов, управления сигналами позволяет управлять движениями робота в зависимости от состояния внешних датчиков, а также включать дополнительное оборудование (до 20 каналов).
Интерфейс программы. Третий экран - Настройки.
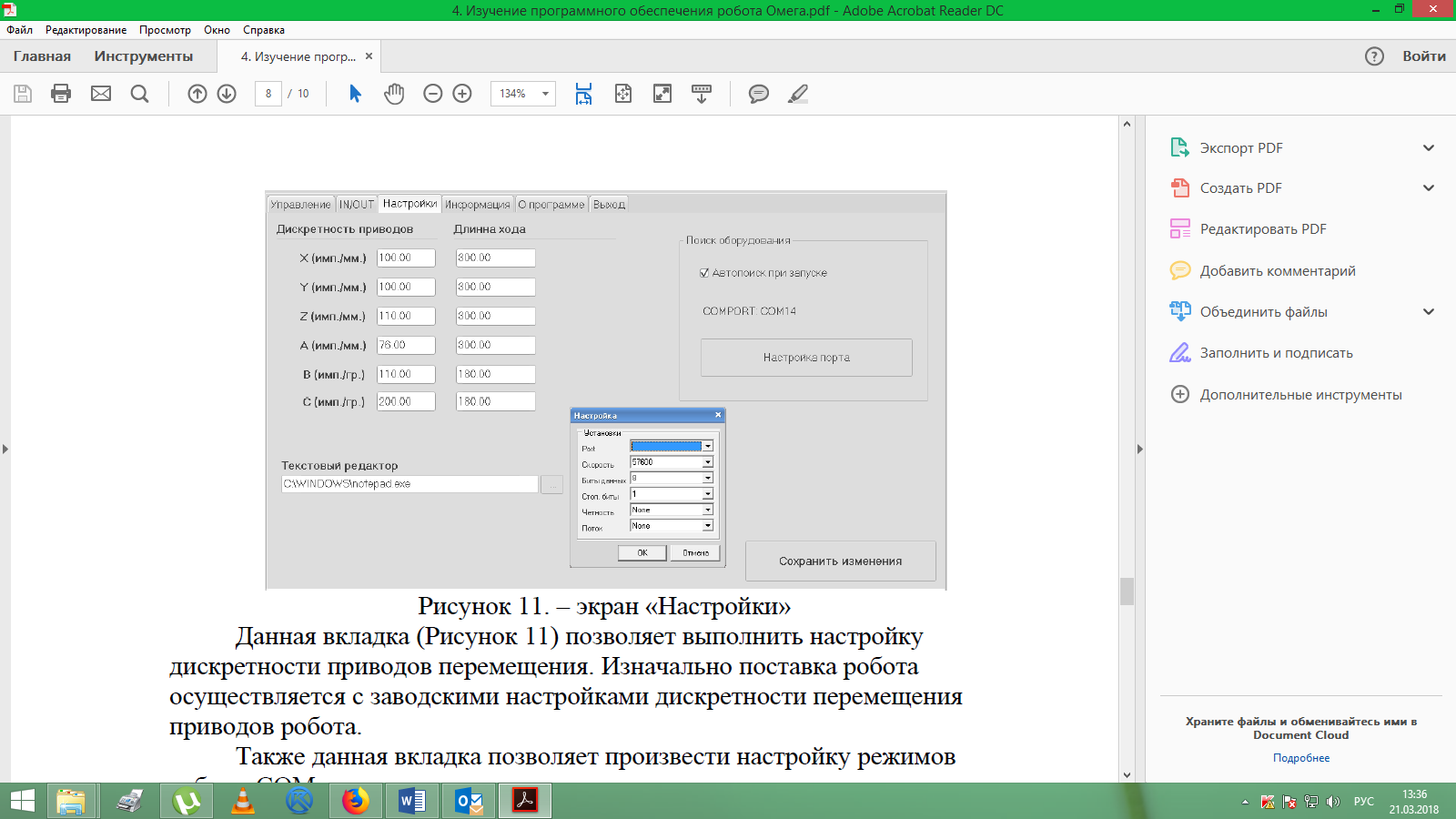
Рисунок 11. – экран «Настройки»
Данная вкладка (Рисунок 11) позволяет выполнить настройку дискретности приводов перемещения. Изначально поставка робота осуществляется с заводскими настройками дискретности перемещения приводов робота.
Также данная вкладка позволяет произвести настройку режимов работы COM порта.
При изменении параметров, в случае необходимости, нужно нажать на «Сохранить изменения» для того, чтобы изменения вступили в силу.
Интерфейс программы. Четвертый экран-Информация

Рисунок 12. – экран «Информация»
Данная вкладка (Рисунок 12) предназначена для быстрого написания управляющей программы, используя органы ручного перемещения и функцию сохранения позиции, расположенные на главном экране ПО.
|
|
|
Вы можете видеть сохраненные кадры, при помощи кнопок «Добавить кадр» или «Удалить кадр» - производить с ними соответствующие действия. Если есть необходимость удалить кадр, то его нужно выделить в поле, где расположен текст преднабранной программы и нажать кнопку «Удалить кадр».
При желании добавить кадр, нужно нажать кнопку – «Добавить кадр» и в появившемся поле ввести кадр и кнопку «Добавить». Для выхода из этого режима нужно нажать кнопку «Отмена».
После формирования управляющей программы, вы можете сохранить свой файл, нажав кнопку «сохранить файл» (Рисунок 13).

Рисунок 13. – сохранение файла программы
Цель работы– познакомиться с программным обеспечением для управления роботом «Омега».
Задачи:
1.Изучить интерфейс программы, ее функционал
2.Написать программу для управления роботом, используя инструментыпрограммного обеспечения
3.Выполнить на практике управление роботом в ручном режиме
4.Запустить автоматическое выполнение программы роботом
5.Сделать выводы о полученных навыках
Лабораторная работа №5
Дата добавления: 2018-05-01; просмотров: 660; Мы поможем в написании вашей работы! |

Мы поможем в написании ваших работ!