Принцип обертання асинхронного двигуна.
Магнітні лінії поля при обертанні магніту перетинаючи стрижні ротора, індукують в них ЕРС згідно із законом електромагнітної індукції, що обумовлює появу в стрижнях струмів.

Напрям цієї ЕРС визначається за правилом Ленца. В результаті взаємодії струмів в стрижнях з магнітним полем виникає сила, напрям якої визначається за правилом Ампера. 
Ця сила утворює електромагнітний обертаючий момент. 
Під дією цього моменту ротор починає обертатись в напрямку обертання магнітного поля. Із збільшенням швидкості обертання ротору і, відповідно, зменшенням відносної швидкості руху стрижнів в магнітному полі індуковані в них ЕРС поступово зменшуються, в зв’язку з цим зменшуються струми в стрижнях ротору і відповідно зменшується обертаючий момент. При певній швидкості обертання ротора (меншій за швидкість обертання магнітного поля) настає рівновага між магнітним обертаючим моментом і моментом опору (тертя) і далі швидкість обертання ротору при рівновазі моментів залишається постійною.
Якщо до ротора прикласти зовнішній момент опору (навантаження) то рівновага порушиться – момент опору буде більший за обертаючий момент. В результаті швидкість обертання ротора почне зменшуватись, швидкість перетинання магнітними лініями стрижнів збільшуватись, індуковані в стрижнях ЕРС і, відповідно, струми збільшуватись, збільшується обертаючий момент і, кінець кінцем при деякій новій швидкості обертання ротора знову досягнеться рівновага моментів.
|
|
|
Трифазна симетрична система струмів збуджує магнітне поле з однією парою полюсів, тобто двополюсне магнітне поле, що обертається. Його вісь повертається на 360°, тобто здійснює один оберт за час одного періоду зміни струму. Звідки, частота обертання двополюсного поля дорівнює за величиною частоті f 1 струмів в обмотці статора.
За історичною традицією частоту обертання прийнято визначати числом обертів n 1 за хвилину n 1 = 60× f 1. Кутова швидкість обертання двополюсного поля W1 = 2p f 1 = w [радіан / сек.]. Отже, кутова швидкість обертання двополюсного магнітного поля за величиною дорівнює кутовій частоті струмів в обмотках статора.
Швидкість обертання ротора і магнітного поля неоднакові. Ступінь відставання швидкості обертання ротору n від швидкості обертання магнітного поля n 0 оцінюється величиною ковзання
 звідки
звідки 
Якщо частота обертання ротора n 2 = n 1, то ковзання S = 0, магнітне поле не перетинає провідники ротора; ЕРС, струм, момент ротора дорівнюють нулю – такий режим роботи називається холостий хід.
Якщо частота обертання ротора n 2 = 0, то ковзання S = 1, магнітне поле не перетинає провідники ротора з максимальною швидкістю; ЕРС, струм, момент ротора максимальні – такий режим роботи називається коротким замиканням.
|
|
|
В багатополюсній обмотці статора кожній парі полюсів поля, що обертається, відповідає трійка котушок для фазних обмоток. Звідки, якщо поле повинно мати р пар полюсів, то кожна з фазних обмоток статора повинна бути розділена на р частин. При цьому частота обертання магнітного поля складає n 1 = 60× f / р.
Хід роботи
1. Зібрати схему (використовуючи плату 3), представлену на рисунку 17.1. Обмотку збудження генератора постійного струму підключити до клем живлення «0‑250 B». Обмотку статора асинхронного двигуна підключити до клем трифазного живлення «3~220 B».
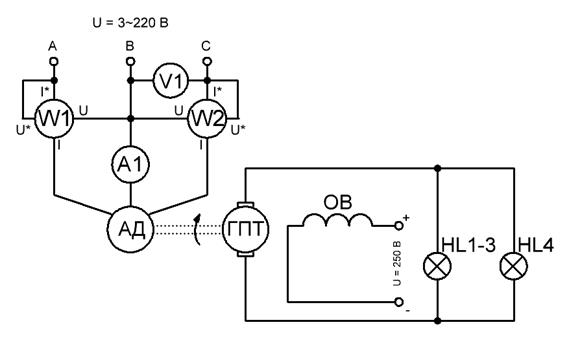
Рисунок 17.1 – Дослідження роботи трифазного асинхронного двигуна.
2. Відключити лампи (холостий хід), після чого подати напругу «3~220 B» на схему. Записати показання всіх приладів в табл. 17.1.
3. Включити і встановити максимальне значення живлячої напруги обмотки збудження генератора за допомогою відповідного потенціометра на лицьовий панелі блоку живлення. Потім вкручуючи по одної лампи (навантаження), збільшувати струм збудження, ЕРС і момент генератора, який буде протидіяти руху двигуна, і записувати показання всіх приладів в табл. 17.1.
|
|
|
4. Після закінчення роботи повільно зменшити напругу «0‑250 B» на обмотці збудження генератора до нуля і вимкнути її, потім відключити напругу «3~220 B», після чого вимкнути живлення.
Таблиця 17.1 – Таблиця вимірювань і розрахунків.
| Режим роботи | Uл, В | Iл, А | Р1, Вт | n2, об/хв | М2, Н∙м | Р2, Вт | s | cosφ | η |
| ХХ(0 л) | |||||||||
| 1 л | |||||||||
| 2 л | |||||||||
| 3 л | |||||||||
| 4 л |
5. Розрахувати та занести в таблицю 16.1
· значення потужності на валу двигуна
 ,
,
· значення ковзання
 ,
,
· значення коефіцієнта потужності
 ,
,
· значення коефіцієнту корисної дії
 ,
,
6. Побудувати механічну n2 = f (M2) та робочі η, М2, cosφ, Iл = f (Р2) характеристики двигуна постійного струму.
7. Протокол повинен містити назву, мету роботи, перелік та метрологічні параметри приладів і параметри машин постійного струму, схему на рис. 17.1, таблицю 17.1, розрахункові формули та результати, механічну n2 = f (M2) та робочі η, М2, cosφ, Iл = f (Р2) характеристики трифазного асинхронного двигуна, висновок про відповідність побудованих характеристик двигуна теоретичним.
|
|
|
Література
1. Паначевський Б.І., Свергун Ю.Ф. Загальна електротехніка: Підручник. – К.: Каравела, 2009. – 296 с.
2. Монтік П.М. Електротехніка та електромеханіка: Навч. посібник. – Л.: "Новий світ ‑ 2000", 2007. – 500 с.
3. Іванов А.А., Монтік П.М. Електротехніка й основи електроніки. – О.: "Друк", 2000.
4. Малиновский В.Н. Електрические измерения. М.: Энергоиздат, 1982.
5. Попов В.С. Теоретические основы электротехники. М.: Энергоиздат,1990.
Дата добавления: 2015-12-21; просмотров: 15; Мы поможем в написании вашей работы! |

Мы поможем в написании ваших работ!