Непрерывный контроль за движением судна при плавании в стесненных водах с помощью РЛС
При плавании в стесненных водах, где судно, как правило, движется по рекомендованным путям или фарватерам, практически непрерывно необходим контроль за движением судна по заданному пути одновременно с наблюдением окружающей обстановки. В этих условиях метод судовождения «от обсервации до обсервации» при современных скоростях и размерах судов не может в полной мере обеспечить безопасность плавания.
Эта задача наиболее эффективно может быть решена с помощью автоматических непрерывных обсерваций (обсервационного счисления), осуществляемых по сигналам РНС в путепрокладчиках навигационных автоматизированных комплексов.
Однако такие системы имеются пока на ограниченном числе морских судов. На большинстве судов для непрерывного контроля движения судна при плавании в стесненных водах может быть использована судовая РЛС или система САРП, если на экране видны эхо-сигналы характерных объектов (маяки, островки, скалы, остроконечные мысы и т. п.).
Непрерывный контроль за движением судна основан на следующих свойствах радиолокационного изображения:
его непрерывности;
относительном движении эхо-сигналов неподвижных объектов (на ИКО РЛС относительного движения эхо-сигнал любого неподвижного объекта движется в сторону, обратную движению судна, — по ЛОД).
 Методы непрерывного контроля основаны на глазомерной оценке положения судна относительно характерных ориентиров, навигационных опасностей или ограждающих их изолиний.
Методы непрерывного контроля основаны на глазомерной оценке положения судна относительно характерных ориентиров, навигационных опасностей или ограждающих их изолиний.
|
|
|
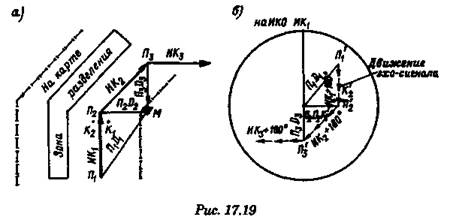
Пусть, например, судну необходимо пройти в районе разделения движения по пути П1,П2,П3 (рис. 17.19,а), где положение точек поворота П1,П2,П3 относительно неподвижного точечного объекта М (плавмаяка, островка и т. п.) определяется при предварительной прокладке по пеленгам и расстояниям.
Во время движения судна по пути П1,П2,П3 эхо-сигнал объекта М будет двигаться по ломаной траектории П1’,П2’,П3’ (рис. 17.19,6), представляющей собой последовательное сложение ЛОД1 (ИК1 ± 180°), ЛОД2 (ИК2 ± 180°) и ЛОД3 (ИК3 ± 180°). Если по пеленгам и расстояниям заранее нанести траекторию П1’,П2’,П3’ на ИКО РЛС или на экран САРП (для этого в РЛС и САРП имеются специальные технические возможности), то можно непрерывно контролировать движение судна по пути П1,П2,П3 не прибегая к частым определениям места судна Признаком движения судна по пути П1,П2,П3 будет последовательное перемещение эхо-сигнала неподвижного объекта М по траектории П1’,П2’,П3’ что определяется наблюдателем визуально на ИКО РЛС или на экране САРП. Отклонение эхо-сигнала от траектории П1’,П2’,П3’ будет означать уклонение судна от маршрута П1П2П3. Своевременно его можно вернуть на этот путь.
|
|
|
Если, например, эхо-сигнал объекта М оказался не на ожидаемой ЛОД, а в точке K’1 (см. рис. 17.19,6), т. е. ближе к центру экрана, то это означает, что судно сдвинулось к объекту (точка К1 на рис. 17.19,а). Поэтому необходимо немного изменить курс в сторону от эхо-сигнала K’1 (в данном случае влево), чтобы вывести эхо-сигнал на П'1,П'2.
Если эхо-сигнал объекта окажется не на ожидаемой ЛОД, а дальше от центра экрана (точка K’2 на рис. 17.19,6), это означает, что судно отодвинулось дальше от объекта (точка К2 на рис.17.19,а). Поэтому необходимо немного изменить курс в сторону эхо-сигнала К’2 (в данном случае вправо).
Таким образом обеспечивается непрерывный контроль за отклонением судна от заданного пути, вызванным действием неизвестного течения, ветрового дрейфа и т. п.
 Точность плавания рассмотренным методом определяется в основном следующими факторами: погрешностью в положении ожидаемой ЛОД эхо-сигнала объекта на ИКО РЛС или экране САРП; величиной поперечного смещения эхо-сигнала от ЛОД, определяемой разрешающей способностью глаза наблюдателя; отклонением эхо-сигнала от намеченной ЛОД за счет маневрирования судна (лежания на неточном курсе и циркуляции при возвращении на линию пути); масштабом изображения на ИКО.
Точность плавания рассмотренным методом определяется в основном следующими факторами: погрешностью в положении ожидаемой ЛОД эхо-сигнала объекта на ИКО РЛС или экране САРП; величиной поперечного смещения эхо-сигнала от ЛОД, определяемой разрешающей способностью глаза наблюдателя; отклонением эхо-сигнала от намеченной ЛОД за счет маневрирования судна (лежания на неточном курсе и циркуляции при возвращении на линию пути); масштабом изображения на ИКО.
|
|
|
Теоретическое исследование и экспериментальная проверка показали, что при наличии точечных ориентиров проводка судна по намеченному пути обеспечивается с точностью до 50 м, если используется шкала дальности 4 мили, и до 115м, если шкала дальности 16 миль.
 Методы непрерывного контроля нашли широкое практическое применение при плавании по рекомендованным путям, выходе судна в точку поворота и т. п. Конкретная реализация этих методов зависит от технических возможностей РЛС и САРП. Но в любом случае по своей геометрической сущности методы непрерывного контроля за движением судна представляют собой варианты использования известных в навигации ограждающих, контрольных и ведущих изолиний с учетом особенностей радиолокационного изображения. Приведем несколько примеров применения метода непрерывного контроля движения судна.
Методы непрерывного контроля нашли широкое практическое применение при плавании по рекомендованным путям, выходе судна в точку поворота и т. п. Конкретная реализация этих методов зависит от технических возможностей РЛС и САРП. Но в любом случае по своей геометрической сущности методы непрерывного контроля за движением судна представляют собой варианты использования известных в навигации ограждающих, контрольных и ведущих изолиний с учетом особенностей радиолокационного изображения. Приведем несколько примеров применения метода непрерывного контроля движения судна.
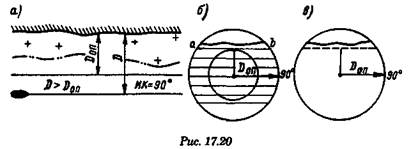
 I. Ограждающее, или опасное, расстояние. Применяется для непрерывного контроля за положением судна относительно навигационных опасностей при плавании вблизи берегов и в узкостях.
I. Ограждающее, или опасное, расстояние. Применяется для непрерывного контроля за положением судна относительно навигационных опасностей при плавании вблизи берегов и в узкостях.
Для заданного участка перехода устанавливают такое значение расстояния Doп, меньше которого до берега не должно быть (рис. 17.20,а). Контроль за безопасным плаванием осуществляется на ИКО РЛС с помощью ПКД, который устанавливают на Doп, или сетки параллельных линий механического визира, установленного параллельно линии ИК. Судоводитель должен следить на ИКО за тем, чтобы между ПКД или параллельной линией визира (на рис. 17.20,6, линия ab) и эхо-сигналом берега был зазор (в этом случае D > Don). При плавании серединой узкостей (рис. 17.21,а) круг радиусом Don должен чисто проходить мимо эхо-сигналов берегов (рис. 17.21,6). Если на судне установлены современные САРП, в которых имеются электронные ограждающие изолинии (например, в САРП «Диджип-лот» NAV—LINE), то можно их применить путем вывода на экран и установки параллельно линии ИК на Dоп (пунктирные линии на рис. 17.20,в, ирис. 17.21,в).
|
|
|
II. Контроль поворота Для этого применяются контрольные пеленги и расстояния. Пусть, например, судну нужно повернуть в точке В с ИК1 на ИК2 (рис. 17.22). На ИК1 кратчайшее расстояние до мыса М — Dкр1 на ИК2 — Dкр2. Для контроля поворота можно использовать различные приемы в зависимости от технических возможностей РЛС.
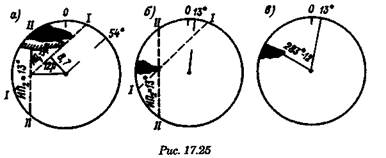
1. Контроль поворота с помощью ПКД и механического 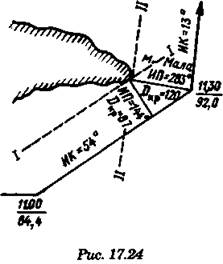 визира. Устанавливают визир на ИПП поворота, а ПКД на DП поворота (рис. 17.23,а). Когда точка К пересечения визира с окружностью коснется эхо-сигнала мыса M1, необходимо поворачивать на ИК2.
визира. Устанавливают визир на ИПП поворота, а ПКД на DП поворота (рис. 17.23,а). Когда точка К пересечения визира с окружностью коснется эхо-сигнала мыса M1, необходимо поворачивать на ИК2.
2. Контроль поворота с помощью электронного визира (рис 17.23,6). Устанавливаем электронный визир на ИПп и расстояние Dn. В момент касания конца визира (точка К) эхо-сигнала мыса M1 ложатся на ИК2.
3. Контроль поворота с помощью САРП (рис. 17.23, в). На экране САРП устанавливают электронные ограждающие изолинии /—/ и II — II на расстояниях Dкр1 и Dкр2 соответственно. При движении судна по ИК1 эхо-сигнал мыса М1 будет перемещаться по линии ИК1±180°. Когда он придет на электронную ограждающую изолинию II — II, необходимо ложиться на ИК2 (рис. 17.23,г).
Контроль поворота с помощью САРП «Дидаеишют» покажем на примере.
Могут быть и другие примеры использования методов непрерывного контроля за движением судна Основное достоинство приведенных методов заключается в том, что их применение не требует ухода судоводителя с мостика в штурманскую рубку и, следовательно, не прерывается визуальное и радиолокационное наблюдение за окружающей обстановкой. Эти методы не заменяют традиционных, а должны разумно сочетаться с ними.
 Обычные определения места судна на карте должны делаться с необходимой дискретностью. Однако эти методы дополняют обычные обсервации и дают быструю оперативную и надежную информацию о том, что судно находится в безопасности в интервалах между обсервациями. Следует также иметь в виду, что методы непрерывного контроля требуют более тщательной и глубокой, чем обычно, проработки предстоящего перехода и подъема карты. В частности необходимо подобрать характерные ориентиры (маяки, островки, скалы, остроконечные мысы и т. п.). Для успешного плавания необходимо, чтобы РЛС была исправна и выверена.
Обычные определения места судна на карте должны делаться с необходимой дискретностью. Однако эти методы дополняют обычные обсервации и дают быструю оперативную и надежную информацию о том, что судно находится в безопасности в интервалах между обсервациями. Следует также иметь в виду, что методы непрерывного контроля требуют более тщательной и глубокой, чем обычно, проработки предстоящего перехода и подъема карты. В частности необходимо подобрать характерные ориентиры (маяки, островки, скалы, остроконечные мысы и т. п.). Для успешного плавания необходимо, чтобы РЛС была исправна и выверена.
Дата добавления: 2016-01-05; просмотров: 37; Мы поможем в написании вашей работы! |

Мы поможем в написании ваших работ!