Точность радиолокационного пеленгования.
Точность определения радиолокационного пеленга (РЛП) при использовании механического визира зависит от следующих факторов:
· ширины диаграммы направленности в горизонтальной плоскости (m1);
· неточной центровки начала развертки (m2);
· неточного визирования эхо-сигнала объекта (m3);
· погрешности нуля отсчета, вызванной сдвигом антенны относительно ДП судна или относительно гироскопического меридиана (m4);
· инструментальной погрешности передачи на индикатор угла вращения антенны (m5);
· погрешности параллактического характера (m6).
Увеличение ширины диаграммы направленности в горизонтальной плоскости вызывает, как уже разбиралось выше, растягивание изображения эхо-сигнала по дуге окружности. Это растягивание тем больше, чем дальше от центра экрана находится отметка эхо-сигнала Изображение точечного объекта растягивается симметрично в обе стороны, и если при пеленговании визир устанавливать над серединой эхо-сигнала, то это явления не внесет заметной погрешности в пеленг.
Иное происходит при пеленговании краев протяженных объектов, например срезов мысов, которые растягиваются несимметрично, только в одну сторону — в сторону моря. Поэтому изображение оконечности объекта появится на экране с некоторой угловой погрешностью, равной половине ширины луча, которая полностью войдет в отсчет пеленга (или курсового угла). Эта угловая погрешность не является постоянной величиной и зависит от многих факторов, в том числе и от отражающих свойств оконечности облучаемого объекта. Например, если мыс оканчивается отвесной скалой, дающей сильное отражение, то погрешность этого рода будет больше, так как эхо-сигнал от скалы достигает большой силы и даст отметку на экране, когда ось радиолокационного луча будет значительно отклонена от направления на нее. Если отражающие свойства оконечности другого мыса будут хуже (например, пеленгуется низкий песчаный мыс), то эхо-сигнал достаточной силы придет к антенне и поступит на ИКО при меньшем удалении оси луча от объекта. Эта погрешность является систематической. Знак погрешности определяется на основании того, что эхо-сигнал наблюдаемого объекта всегда вытянут в сторону моря.
 Из сказанного выше видно, что при радиолокационном пеленговании следует рассматривать два случая: пеленгование точечных и малых отдельно лежащих объектов; пеленгование оконечностей протяженных объектов. Предпочтение следует отдавать первому случаю.
Из сказанного выше видно, что при радиолокационном пеленговании следует рассматривать два случая: пеленгование точечных и малых отдельно лежащих объектов; пеленгование оконечностей протяженных объектов. Предпочтение следует отдавать первому случаю.
Примем для точечных объектов т, = 0,4°.
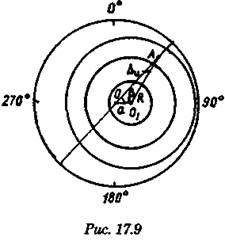
Погрешность от неточной центровки (когда центр окружности, описываемой началом развертки, не совпадает с центром вращения линейки визира, рис. 17.9)

где а — расстояние, на которое смещено начало развертки;
β— направление смещения начала развертки относительно линии визирования; R — расстояние до эхо-сигнала.
Из формулы (17.7) видно, что при прочих равных условиях погрешность будет тем больше, чем ближе к центру экрана будет находиться эхо-сигнал. Для уменьшения погрешности пеленга от неточной центровки нужно применять такую шкалу дальности, чтобы эхо-сигнал пеленгуемого объекта оказался на периферии экрана.
При постоянных значениях а и R погрешность достигает своей максимальной величины, когда отметка эхо-сигнала находится на линии, перпендикулярной к направлению смещения центра развертки.
Смещение центра развертки неизбежно и постоянно изменяется, особенно с переменой курса, так как меняется общее магнитное поле судна. Величина смещения редко бывает меньше ± 1 мм. При этом условии погрешность пеленга для объектов, эхо-сигналы которых находятся на расстоянии 0,5 радиуса экрана, может составить около m2 = 0,4°, увеличиваясь при перемещении эхо-сигнала к центру экрана и уменьшаясь при его перемещении к периферии.
Погрешность от неточного визирования возникает вследствие того, что эхо-сигналы объектов на ИКО часто не имеют резко очерченных границ, поэтому при пеленговании мысов бывает затруднительно установить визир точно над краем изображения. Если же пеленгуется какой-либо отдельно лежащий объект, не являющийся точечным, то из-за расплывчатости краев и возможных искажений в его изображении на экране наблюдатель не всегда может симметрично разделить визиром такую отметку. На расстоянии 1/3 радиуса экрана эта погрешность достигает ± 0,6°; 2/3 радиуса — ± 0,3°. Примем в среднем m3 = 0,5°.
Погрешность в нуле отсчета, вызванная сдвигом антенны относительно ДП или гирокомпасного меридиана, может составить m4 = 0,3°. Инструментальная погрешность передачи на индикатор угла вращения антенны m5 ≈ 0,3°.
Кроме того, сравнительно небольшие отклонения глаза наблюдателя от строго вертикального положения над визиром вызывают погрешности параллактического характера и при снятии отсчета пеленга, и при совмещении визира с пеленгуемым объектом, так как изображение рисуется на внутренней поверхности ЭЛТ и между нижней кромкой визира и верхней поверхностью трубки имеется некоторый просвет. Поэтому даже при небольших смещениях глаза от строго вертикального положения над визиром при установке визира над объектом возникают большие погрешности (порядка m6 = 0,5°). Эти погрешности являются случайными и оказывают большое влияние на точность РЛП.
Складывая все названные погрешности, получаем среднюю квадратичную погрешность определения радиолокационного пеленга mрлп = 1,0°
Можно заключить, что при пеленговании точечных объектов в лучшем случае погрешность радиолокационного пеленга может быть примерно ± 1,0°. При пеленговании мысов погрешность возрастает и может достигать величины ± 2...3°, главным образом за счет искажения (растягивания) эхо-сигналов мысов и неточного визирования.
Так как измеренный РЛП перед прокладкой на карте нужно исправить поправкой гирокомпаса в соответствии с формулой ИП = РЛП + ∆ГК, то на точность проложенного на карте РЛП будет влиять всегда возможная погрешность в поправке гирокомпаса, что судоводитель должен учитывать.
Точность радиолокационного пеленгования будет несколько выше при использовании электронного визира за счет устранения погрешностей m2 и m6. В этом случае mрлп = 0,8°.
В режиме автосопровождения точность будет еще выше.
Если пеленгование производится при ориентировке ИКО «по курсу» (или при отклоненном от РЛС гирокомпасе), то на объект определяют радиолокационный курсовой угол (РЛКУ) и для прокладки на карте рассчитывают ИП по формуле 
В этом случае в пеленг полностью войдет погрешность от неточного определения РЛКУ (вследствие несовпадения нуля азимутального круга с отметкой курса) и погрешность от неточного фиксирования курса (по репитеру гирокомпаса) в момент пеленгования.
Погрешность в КУ от несовпадения нуля азимутального круга ИКО с отметкой курса может достигать 0,5... 1,0°; она особенно опасна при расхождении с судами на встречных курсах. Поэтому всегда необходимо добиваться возможно большей точности установки нуля индикатора. Если это почему-либо не сделано, то при первом же выходе в море необходимо определить погрешность путем сравнения КУ, наблюдаемых одновременно по компасу и РЛС. Эта погрешность будет постоянной и должна исключаться из всех отсчетов курсовых углов.
Проведенные исследования показывают, что точность радиолокационного пеленгования значительно снижается при качке судна. Например, при крене 10° и дифференте 8° погрешность пеленгования возрастает на 1°. Возникающая вследствие этого погрешность зависит от КУ на объект и равна нулю при КУ, близких к 0; 180 или 90° каждого борта; наибольшего значения она достигает при КУ, близких 45 или 135°. Чтобы уменьшить влияние качки на точность измерения, нужно пеленговать ориентиры, расположенные на носовых (кормовых) и траверзных углах. Если необходимо получить точный пеленг на объект при качке, рекомендуется брать несколько отсчетов пеленга при различных углах качки судна и осреднять отсчеты.
Из сказанного видно, что радиолокационное пеленгование производится с невысокой точностью. Поэтому при определении места судна к нему следует прибегать, в крайнем случае, когда нельзя определить место другими, более точными способами. Следует стремиться пеленговать только точечные ориентиры и не пеленговать объекты, близко расположенные к центру ИКО.
На некоторых судах применяются двухдиапазонные РЛС «Океан», работающие на λ = 3,2 н 10 см. При равных размерах антенн диаграмма направленности в диапазоне λ = 10 см получается более широкой, отчего в 3 раза снижается разрешающая способность по углу и несколько падает точность радиолокационного пеленгования. Поэтому для более точного определения пеленга надо применять
λ = 3,2 см.
Следует иметь в виду, что точность радиолокационного пеленгования во многом зависит от опыта наблюдателя.
Радиолокационная девиация. Часто антенны РЛС не удается установить так, чтобы в пространство ее облучения не попадали мачты, такелаж, антенны и другие устройства. В связи с этим наблюдаются так называемые теневые секторы (см. п. 17.3). Отсчеты РЛП, взятые в этих секторах и в пределах 3...5° от их границ могут содержать значительные погрешности, называемые радиолокационной девиацией. Причиной ее является искажение электромагнитного поля сигнала, отраженного от объекта, полем, создаваемым на судне вторичными излучателями (принимаемые отраженные сигналы возбуждают ЭДС в мачтах, трубках, антеннах).
Радиолокационная девиация может быть найдена экспериментально и учтена как поправка при расчете радиолокационного пеленга: 
Методика определения ∆РЛКУ такая же, как при определении радиодевиации радиопеленга визуальным способом. Перед производством работ весь такелаж надо закрепить по-походному. ИКО должен быть ориентирован «по курсу».
 Для определения радиолокационной девиации два наблюдателя одновременно должны измерять визуально КУ по азимутальному кругу компаса на объект наблюдения и РЛКУ по азимутальному кругу ИКО.
Для определения радиолокационной девиации два наблюдателя одновременно должны измерять визуально КУ по азимутальному кругу компаса на объект наблюдения и РЛКУ по азимутальному кругу ИКО.
Объектами наблюдения должны быть точечные объекты, например, буи с уголковыми отражателями, плавмаяки, маяки-ответчики и т. п., находящиеся на расстоянии хорошей визуальной видимости. Для определения радиолокационной девиации для всего диапазона КУ необходимо ложиться на отдельные курсы через 5... 10°. По результатам наблюдений радиолокационную девиацию рассчитывают по формуле

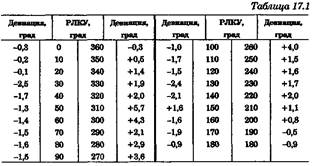
Затем составляют таблицу (табл. 17.1) и вычерчивают график радиолокационной девиации как функции РЛКУ.
Установлено, что с увеличением длины волны РЛС и расширением диаграммы направленности антенны в горизонтальной плоскости радиолокационная девиация увеличивается.
Чтобы точно определить радиолокационные пеленги, совершенно необходимо учитывать радиолокационную девиацию, поэтому ее нужно определять при первоначальной установке РЛС на судне и при изменениях в установке такелажа, антенн и т. п.
Точность измерения расстояний. Расстояние до эхо-сигнала объекта на экране РЛС может быть измерено с помощью неподвижных (НКД) и подвижных (ПКД) кругов дальности.
С помощью НКД расстояние до объекта измеряется приближенно, путем глазомерной интерполяции положения эхо-сигнала между НКД. В этом случае точность измерений зависит от погрешностей интерполяции, погрешностей расстановки колец дальности, степени нелинейности развертки.
Наибольшее влияние на точность измерения расстояний оказывает первая погрешность. Наблюдатель способен разделить расстояние между НКД с точностью до 1/10, что дает предельную погрешность в ±10% от этого расстояния. Среднюю квадратичную погрешность измерения расстояния можно найти по формуле

где Dm — шкала дальности; N—число колец дальности.
Например, для РЛС «Океан», имеющей на шкале 16 миль 4 круга дальности, получаем mD = 1,3 кб.
Из формулы (17.10) видно, что с увеличением числа колец дальности относительная точность измерений повышается. Однако большое число колец осложняет наблюдения за экраном, поэтому в судовых РЛС, не имеющих ПКД, их не более 10.
Погрешностями расстановки колец дальности пренебрегают, так как они много меньше погрешностей интерполяции. При нелинейности не более 2...3% возникающие погрешности будут на порядок ниже погрешностей интерполяции, поэтому ими также можно пренебречь.
Более точно измерить расстояние можно с помощью ПКД. Точность этого измерения определяется погрешностями калибровки, инструментальной, измерений и объекта.
Погрешность калибровки выражается в том, что каждое фиксированное значение радиуса подвижного круга не соответствует действительному расстоянию для избранного масштаба. При калибровке ПКД расстояния, измеренные с помощью РЛС, сравнивают с расстояниями, измеренными геодезическим путем, и в случае необходимости корректируют отсчет ПКД. Такой метод калибровки имеет высокую точность, и остаточная погрешность не будет превышать 10 м.
В судовых условиях пользуются следующим приемом. На стоянке в порту точно определяют место судна и наносят его на план (масштаб не менее 1:25 000). С плана снимают расстояния до хорошо приметных на экране РЛС точечных объектов и по ним производят калибровку, как в уже описанном способе. При таком методе точность будет соответствовать точности измерения расстояний на плане.
Исследования показывают, что при исправном действии дальномерного устройства погрешность калибровки не будет превышать 0,1...0,2кб. Погрешности калибровки обычно малы, и они могут иметь значение только при проводке судна по узким фарватерам.
Инструментальная погрешность вызывается неточностью работы фазовращателя РДС и обычно имеет величину примерно ± 10... 15 м.
Случайная погрешность измерения возникает при неточном совмещении ПКД с объектом, до которого измеряется расстояние. Причем при каждом последующем совмещении наблюдатель будет устанавливать подвижный круг несколько в ином положении, чем при предыдущем. Вследствие этого на счетчике будут получаться расстояния, отличающиеся друг от друга.
Случайная погрешность зависит от опыта наблюдателя, четкости и масштаба изображения объекта и может быть выведена из серии отсчетов. Для уменьшения этой погрешности рекомендуется производить наблюдения при возможно крупном масштабе изображения и совмещать внешний край ПКД с передним краем изображения объекта. При этом легко улавливаются незначительные совмещения ПКД. Яркость ПКД должна быть минимальной.
Погрешность объекта является наиболее существенной при измерении расстояний. Она заключается в том, что штурман не всегда может совершенно точно указать на карте ту часть наблюдаемого объекта, которая создала передний фронт эхо-сигнала на ИКО. Наиболее просто и точно можно измерить расстояния до отдельно лежащих объектов и обрывистых мысов, наименее точно — до низких берегов, пологих мысов и т. п. Поэтому к расстояниям, измеренным до береговой черты или до объектов, расположенных в отдалении от уреза воды (возвышенности, здания, маяки), всегда следует относиться с осторожностью.
На погрешности объекта сказывается степень усиления. При повышенном усилении очертания изображения объекта расплываются и вследствие этого будет измерено меньшее расстояние; при пониженном — большее.
Точность измерения расстояний с помощью РЛС, определенная экспериментальным путем, приводится в описании каждой станции и колеблется в пределах 0,2...1,0кб. На качке погрешность измерения расстояний несколько возрастает, но погрешность не превышает высоты антенны.
Дата добавления: 2016-01-05; просмотров: 66; Мы поможем в написании вашей работы! |

Мы поможем в написании ваших работ!