Ложные эхо-сигналы.
 При чтении радиолокационного изображения наблюдатель сталкивается с появлением на экране различных ложных эхо-сигналов, мешающих радиолокационному наблюдению. Причинами их появления могут быть техническое несовершенство и неисправность РЛС, физические явления, связанные с распространением радиоволн. Рассмотрим некоторые ложные эхо-сигналы. Вследствие несовершенства антенны не могут собирать всю энергию в один пучок, называемый главным лепестком. Часть энергии излучается и по боковым направлениям. Количество этой энергии обычно невелико и составляет в хороших антеннах не более 5% всей излучаемой энергии. Эти нежелательные дополнительные излучения принято называть боковыми лепестками. Эхо-сигналы, принятые боковыми лепестками антенны, появляются в виде нескольких изображений одного и того же объекта, расположенных по дуге окружности, радиус которой равен расстоянию до объекта
При чтении радиолокационного изображения наблюдатель сталкивается с появлением на экране различных ложных эхо-сигналов, мешающих радиолокационному наблюдению. Причинами их появления могут быть техническое несовершенство и неисправность РЛС, физические явления, связанные с распространением радиоволн. Рассмотрим некоторые ложные эхо-сигналы. Вследствие несовершенства антенны не могут собирать всю энергию в один пучок, называемый главным лепестком. Часть энергии излучается и по боковым направлениям. Количество этой энергии обычно невелико и составляет в хороших антеннах не более 5% всей излучаемой энергии. Эти нежелательные дополнительные излучения принято называть боковыми лепестками. Эхо-сигналы, принятые боковыми лепестками антенны, появляются в виде нескольких изображений одного и того же объекта, расположенных по дуге окружности, радиус которой равен расстоянию до объекта
Если объект находится достаточно близко к антенне и обладает хорошей отражающей способностью, то эхо-сигналы от боковых лепестков могут засветить экран РЛС. Процесс образования подобных ложных (так как их в действительности в этом направлении нет) эхо-сигналов показан на рис. 17.11. Как видно из рисунка, эхо-сигнал от данного объекта, вызванный каждым боковым лепестком, появляется на экране в тот момент, когда этот боковой лепесток направлен на объект (ложные эхо-сигналы 1, 3, действительный — 2). Антенна в этот момент не направлена на объект, но эхо-сигнал от бокового лепестка появится на экране на пеленге антенны, указываемом направлением развертки. Очень часто такие эхо-сигналы образуют большие ярко светящиеся дуги, затрудняющие наблюдения. Такие ложные эхо-сигналы могут быть устранены уменьшением общего усиления и применением 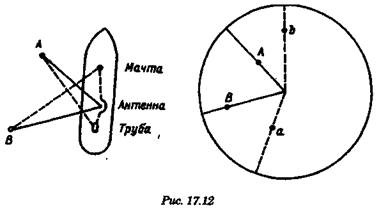 ВАРУ.
ВАРУ.
|
|
|
Непрямые эхо-сигналы появляются от реальных объектов, но в другом направлении, так как часть энергии, посылаемая антенной РЛС и отраженная какими-либо металлическими судовыми конструкциями, достигает объектов и отражается от них, в то время как развертка направлена в другую сторону. Отраженный сигнал тем же путем возвращается в антенну и создает засветку экрана в направлении судовой конструкции, расположенной на расстоянии, соответствующем истинной дальности до объекта.
Чаще всего ложные эхо-сигналы, например а и b на рис. 17.12, наблюдаются в теневых секторах, т. е. на постоянных КУ, независимо от КУ объекта. Вид ложных эхо-сигналов обычно не соответствует виду прямого эхо-сигнала от того же объекта.
Если судно находится близко к постройкам, мостам, стенкам дока и т. п., от них могут получаться ложные эхо-сигналы точно так же, как и от частей судна Это обычно бывает при плавании в узкостях. Ложные эхо-сигналы могут появиться в любой части экрана, создавая значительные помехи наблюдению.
|
|
|
Определение места судна с помощью РЛС
Радиолокационная станция применяется главным образом для определения места судна по измеренным расстояниям. При наличии точечных или имеющих характерные очертания ориентиров можно для этого использовать и радиолокационные пеленги.
Так как изображение берегов на экране только лишь в общих чертах совпадает по своему виду с их изображением на карте, то при подхода к берегу с моря возникает задача опознавания района нахождения судна, а также объектов, эхо-сигналы которых видны на ИКО и которые затем могут быть использованы для определения места судна.
Опознавание береговой черты. Основными признаками для опознавания берега являются конфигурация береговой черты, отдельно лежащие в море скалы, островки и т. п. Для опознавания нужно использовать также все навигационные средства, особенно такие, как измерение глубин и радиопеленгование. Это в значительной степени поможет разобраться в изображении берега на экране. Изображение при этом следует ориентировать относительно меридиана
|
|
|
Опознавание береговых объектов для последующего определения места судна может производиться несколькими способами.
 1. Способ веера. Наблюдатель быстро измеряет пеленги и расстояния до характерных объектов а, Ь, с, d, e, f (рис. 17.13,а). Затем на кальке прокладывает линию пути судна и из любой точки этой линии по измеренным пеленгам и расстояниям в масштабе карты наносит места объектов — а', Ь', с', d', e', f’ (рис. 17.13,6). Наложив кальку на карту в районе счислимого места, перемещает ее до тех пор, сохраняя параллельность линии пути, пока точки а', Ь', с', d', e', f’ не совпадут с характерными объектами на карте. Точка пересечения пеленгов и будет приближенным местом судна, а объекты на экране можно считать опознанными. Для большей уверенности наблюдения следует повторить несколько раз, связывая полученные обсервованные точки счислением.
1. Способ веера. Наблюдатель быстро измеряет пеленги и расстояния до характерных объектов а, Ь, с, d, e, f (рис. 17.13,а). Затем на кальке прокладывает линию пути судна и из любой точки этой линии по измеренным пеленгам и расстояниям в масштабе карты наносит места объектов — а', Ь', с', d', e', f’ (рис. 17.13,6). Наложив кальку на карту в районе счислимого места, перемещает ее до тех пор, сохраняя параллельность линии пути, пока точки а', Ь', с', d', e', f’ не совпадут с характерными объектами на карте. Точка пересечения пеленгов и будет приближенным местом судна, а объекты на экране можно считать опознанными. Для большей уверенности наблюдения следует повторить несколько раз, связывая полученные обсервованные точки счислением.
2. Способ траверзных расстояний. Наблюдатель измеряет расстояния до объекта, эхо-сигналы которых видны на экране, когда они приходят на один и тот же КУ, лучше всего на траверз, и в момент измерения расстояний замечает время и отсчет лага. Затем на листке кальки прокладывает линию курса со счислимыми точками каждого измерения. Из соответствующих точек по КУ и расстоянию наносит объекты. Кальку накладывает на карту и перемещает, как и в первом случае. В результате совпадения объектов наблюдатель получает уточненное положение линии пути и опознанные объекты на экране РЛС.
|
|
|
Определение места судна по расстояниям до нескольких ориентиров.
1. Расстояния измеряются до точечных или имеющих характерные очертания ориентиров (выступающих мысов и островков небольших размеров). Наблюдатель последовательно измеряет расстояния до нескольких ориентиров с помощью ПКД. При этом ПКД нужно совмещать с той частью изображения, которая больше всего выступает в сторону судна.
Чтобы уменьшить влияние разновременности измерения расстояний на точность определения места судна этим способом, необходимо сначала измерять расстояния до объектов, расположенных на траверзе или около него, а затем до объектов, расположенных на острых КУ, или, если скорость судна значительна, приводить измерения к одному месту. Приведение можно производить графически или с помощью таблиц величины изменения расстояния, например табл. 31МТ-75.
 2. Расстояния измеряются до участка береговой черты с плавными очертаниями и точечного (или имеющего характерные очертания) ориентира. Измерения расстояний ничем не отличаются от предыдущего способа Однако прокладка этих расстояний затруднена, так как на плавной береговой черте невозможно найти точку, до которой производились измерения.
2. Расстояния измеряются до участка береговой черты с плавными очертаниями и точечного (или имеющего характерные очертания) ориентира. Измерения расстояний ничем не отличаются от предыдущего способа Однако прокладка этих расстояний затруднена, так как на плавной береговой черте невозможно найти точку, до которой производились измерения.
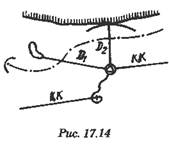
Построение ведется следующим образом (рис. 17.14): от точечного объекта радиусом, равным измеренному расстоянию, проводят дугу окружности и на ней ищут место, откуда дуга, проведенная радиусом, соответствующим второму измеренному расстоянию, касалась бы плавной береговой черты. Положение острия циркуля будет соответствовать месту судна. Точность определения места судна в данном случае будет несколько ниже, чем в первом, за счет всегда возможной ошибки объекта при измерении расстояния до береговой черты.
Для контроля следует определить радиолокационный пеленг точечного объекта и нанести его на карту.
 3. Расстояния измеряются до участков береговой черты с плавными очертаниями. В практике часто встречаются случаи, когда на ИКО видны только плавные очертания береговой черты без каких-либо приметных ориентиров, например при входе в проливы, устья рек, широкие каналы и т. п.
3. Расстояния измеряются до участков береговой черты с плавными очертаниями. В практике часто встречаются случаи, когда на ИКО видны только плавные очертания береговой черты без каких-либо приметных ориентиров, например при входе в проливы, устья рек, широкие каналы и т. п.
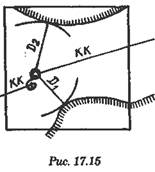
В этом случае рекомендуется измерять расстояния D1 и D2 до ближайших к судну точек береговой черты (рис. 17.15).
Затем на кальку наносят линию курса судна и из какой-либо точки этой линии проводят дуги окружностей радиусами, равными измеренным расстояниям (в масштабе карты). Дуги проводят примерно в районе тех КУ, на которых были измерены расстояния. Кальку накладывают на карту так, чтобы общий центр дуг находился примерно в районе счислимого места. Передвигая кальку на карте, находят такое ее положение, при котором дуги коснутся обоих участков берега. Положение центра дуг в этот момент и определит место судна. Очевидно, что в случае, когда участки береговой черты параллельны, место судна определить таким способом нельзя.
 4. Если во время измерения расстояний до участков береговой черты с плавными очертаниями одновременно заметить и приближенные пеленги на точки касания ПКД, то построение можно выполнить непосредственно на карте, не пользуясь калькой. Для этого от наблюдаемых объектов проводят линии пеленгов и откладывают на них измеренные расстояния D1 и D2. Через полученные таким путем точки проводят линии /— / и //— II, перпендикулярные наблюденным пеленгам. Точка пересечения этих линий и даст место судна (рис. 17.16).
4. Если во время измерения расстояний до участков береговой черты с плавными очертаниями одновременно заметить и приближенные пеленги на точки касания ПКД, то построение можно выполнить непосредственно на карте, не пользуясь калькой. Для этого от наблюдаемых объектов проводят линии пеленгов и откладывают на них измеренные расстояния D1 и D2. Через полученные таким путем точки проводят линии /— / и //— II, перпендикулярные наблюденным пеленгам. Точка пересечения этих линий и даст место судна (рис. 17.16).
Реальная средняя квадратичная погрешность определения места судна по двум радиолокационным расстояниям может быть рассчитана по формуле


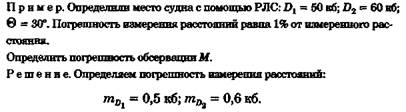
Вычисляем погрешность М, кб:

При определении места судна по трем радиолокационным расстояниям погрешность может быть рассчитана по формуле

Определение места судна по радиолокационному пеленгу и расстоянию до одного ориентира. Этот способ применяется, когда на ИКО виден только один хорошо различимый, лучше всего точечный, ориентир и его не видно визуально. Обсервованное место получают на линии пеленга на измеренном расстоянии от объекта. При прокладке линии радиолокационного пеленга не следует забывать исправлять пеленг поправкой ГК.
Средняя квадратичная погрешность в определении места судна данным способом может быть вычислена по формуле.

Так как расстояние РЛС измеряется с высокой точностью, то погрешности в определении места судна этим способом зависят, главным образом, от погрешностей радиолокационного пеленга.
Кроме названных выше, могут применяться также и комбинированные способы определения места, например по визуальному пеленгу маяка и радиолокационному расстоянию и др.
Учитывая, что главную трудность при радиолокационных наблюдениях составляет точное опознавание объектов, нужно стремиться получить не менее трех линий положения (три расстояния, два расстояния и пеленг и т. д.). Тогда большой треугольник погрешности, заметно не изменяющийся при повторном наблюдении через небольшой промежуток времени, укажет на погрешность в опознавании объектов или на погрешности наблюдений.
При определении места судна с помощью РЛС главная задача состоит в том, чтобы узнать, от каких участков берега отразился сигнал. Если это не установлено, то определить место судна нельзя, а можно только сказать, проходит судно чисто от опасности или нет.
Поскольку изображение местности на ИКО имеет особенности и лишь в общих чертах сходно с ее изображением на карте, для уверенного опознавания различных участков береговой черты необходимо проводить радиолокационное изучение района плавания.
Исправно работающая и умело используемая РЛС позволяет уверенно плавать в условиях полного отсутствия видимости. Однако при этом нельзя пренебрегать обычными методами контроля за движением судна. Нужно аккуратно вести счисление и возможно чаще определять место судна при хорошей видимости с помощью РЛС, особенно при плавании в незнакомых или малознакомых местах. Тогда при внезапном ухудшении видимости судоводитель уверенно будет опознавать объекты по изображению на экране, чтобы использовать их для дальнейших радиолокационных обсерваций.
Дата добавления: 2016-01-05; просмотров: 26; Мы поможем в написании вашей работы! |

Мы поможем в написании ваших работ!