Электромагнитов переменного и постоянного тока
|
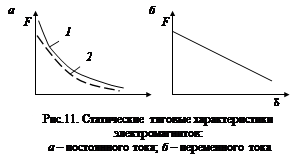
Статические характеристики электромагнитов снимают, когда в обмотках электромагнитов протекает неизменный ток при неподвижном и движущемся якоре. Статическая тяговая характеристика – зависимость силы тяги электромагнита F от величины зазора d для электромагнитов постоянного и переменного тока (рис.11). Кривая 2 (рис.11, а) изображает зависимость F = f (d), снятую экспериментально. Сравнение кривых 1 и 2 показывает, что при больших зазорах, когда поток в системе мал (падением магнитного потенциала можно пренебречь), эти кривые почти совпадают. Для электромагнитов переменного тока (рис.11, б) при увеличении зазора d растет магнитное сопротивление рабочего зазора и ток в обмотке, уменьшается индуктивность катушки, а поток (Фd) в рабочем зазоре остается постоянным. Однако влияние активного сопротивления R катушки ограничивает рост тока и, следовательно, тяговое усилие F из-за этого уменьшается.
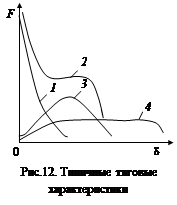
Выше были приведены тяговые характеристики, соответствующие простому клапанному электромагниту. Для более сложных электромагнитов типичные тяговые характеристики представлены на рис.12, где кривая 1 имеет гиперболический вид, характерный для электромагнитов, у которых поток рассеяния не создает силы; кривая 2 – седлообразный вид, свойственный электромагнитам, у которых возникает дополнительная сила, создаваемая потоком рассеяния; кривая 3 – Л-образный вид, наблюдается у электромагнитов, состоящих из катушки и якоря, втягиваемого внутрь катушки (электромагниты соленоидного типа), а также у электромагнитов, якорь которых перемещается перпендикулярно к направлению магнитного потока; кривая 4 – пологий вид, свойственный электромагнитам с незамкнутой и замкнутой магнитными цепями, у которых якорь втягивается внутрь катушки
|
|
|
|
Подключение обмоток электромагнитов постоянного и переменного тока к источнику питания преимущественно параллельное, в отдельных случаях (токовые реле) – последовательное.
При сравнении статических характеристик электромагнитов постоянного и переменного тока следует сделать следующие выводы:
1. Поскольку среднее значение силы тяги при переменном токе  (см. рис.10), для электромагнитов переменного и постоянного тока F ср.пер = 0,5 F ср.пост, поэтому электромагнит постоянного тока развивает в 2 раза большее усилие, чем электромагнит переменного тока.
(см. рис.10), для электромагнитов переменного и постоянного тока F ср.пер = 0,5 F ср.пост, поэтому электромагнит постоянного тока развивает в 2 раза большее усилие, чем электромагнит переменного тока.
2. Электромагнит переменного тока имеет вибрацию якоря.
3. В электромагнитах постоянного тока сила тяги резко падает при увеличении зазора, поэтому эти электромагниты делаются с малым зазором.
4. В электромагнитах переменного тока при увеличении зазора растет магнитное сопротивление R m зазора и ток в обмотке. При этом в рабочем зазоре поток Фd падает только за счет активного сопротивления в обмотке, т.е.
|
|
|
|
 ,
,
где Iw – м.д.с. обмотки.
Таким образом, электромагнит переменного тока как бы имеет автоматическую форсировку. При большем зазоре создается бóльшая м.д.с. обмотки, которая обеспечивает необходимый поток в рабочем зазоре, поэтому у электромагнитов переменного тока возможен большой ход якоря.
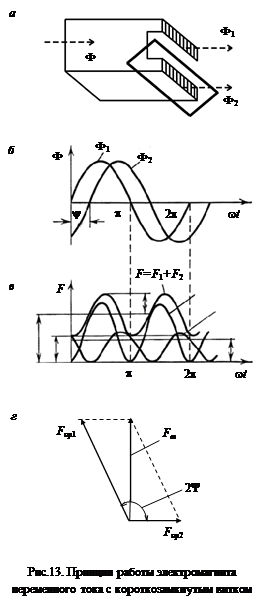
Особенностью работы электромагнитов переменного тока является вибрация якоря. Для борьбы с вибрацией якоря в однофазных электромагнитах применяются короткозамкнутые витки (рис.13, а), полностью или частично охватывающие полюсы магнитопровода. Основное назначение экранов – изменение фазы магнитного потока.
Экран создает свой магнитный поток Ф2, который отстает по фазе на угол y от основного потока Ф1 и создает свою намагничивающую силу F 2. Каждый из потоков создает под своей частью полюса свою силу тяги F 1 и F 2 (рис.13, б).
В верхней части полюса развивается сила тяги
 ,
,
в нижней части
 .
.
Результирующая сила тяги, действующая на якорь, равна сумме сил F 1 и F 2 (рис.13, в). Согласно рис.13, г амплитуда переменной составляющей может быть найдена из векторной диаграммы, тогда
|
|
|
Fm .пер =  . (7)
. (7)
Обычно электромагнит проектируется так, чтобы его минимальная сила тяги F min была больше противодействующей силы:
F min = F ср – Fm .пер > F прот .
Чем меньше Fm. пер, тем меньше пульсация силы тяги. Из (7) следует, что для уменьшения пульсации тяговой силы необходимо уменьшение амплитуды Fm. пер, что возможно при следующих условиях: Fm. пер = 0 при F ср1 = F ср2 и y = 90°. Эти условия выполнить невозможно, поэтому для ненасыщенных потоков Ф2 = Ф1 при y = 60°¸65°, а сила F ср1 ¹ F ср2. Поскольку короткозамкнутый виток уменьшает поток под нижней частью полюса, с целью выравнивания потоков Ф1 и Ф2 этот виток охватывает бóльшую часть полюса (обычно 2/3).
Для уменьшения вибрации якоря в трехфазном электромагните используется естественный сдвиг потоков в этой системе (т.е. при трехфазном источнике питания). Магнитные потоки всех трех фаз электромагнитов симметричны. Примем, что насыщение отсутствует, тогда сила тяги, развиваемая под каждым полюсом,

 .
.
Результирующая сила, действующая на якорь, равна сумме этих сил:

 .
.
Таким образом, результирующая сила в трехфазном электромагните во времени не меняется. Однако вибрация якоря полностью не устраняется. При прохождении магнитного потока в каждой фазе через ноль сила, развиваемая этой фазой, также равна нулю. В результате точка приложения электромагнитной силы перемещается. Поскольку точка приложения противодействующей силы неизменна, возникает перекатывание якоря, т.е. вибрация.
|
|
|
Дата добавления: 2016-01-04; просмотров: 23; Мы поможем в написании вашей работы! |

Мы поможем в написании ваших работ!