Электромагнитные реле
Общие сведения
Для выполнения автоматического управления какими-либо объектами используется релейное управление, при котором изменение управляющего параметра (входной сигнал) приводит к скачкообразному изменению управляемого параметра (выходной сигнал).
Электрический аппарат, реализующий релейный закон управления, называется реле. В реле при плавном изменении управляющего (входного) параметра до определенного заданного значения управляемый (выходной) параметр изменяется скачкообразно. При этом хотя бы один из этих параметров должен быть электрическим.
Основными функциональными органами реле являются: воспринимающий (измерительный), промежуточный и исполнительный.
Воспринимающий орган реагирует на управляющую величину X и преобразует ее в физическую величину, необходимую для работы реле.
Промежуточный орган сравнивает преобразованную физическую величину с определенным, наперед заданным значением. При достижении преобразованной величиной заданного значения промежуточный орган передает воздействие исполнительному органу. Исполнительный орган, обеспечивая скачкообразное изменение выходного управляемого параметра, воздействует на управляемую цепь.
В электромагнитных реле перемещение элементов воспринимающего органа обусловлено взаимодействием электромагнитного поля чувствительного элемента с якорем. В качестве воспринимающего органа используются электромагнитные механизмы. Они имеют сравнительно большие тяговые усилия при относительно малых габаритах, что и обусловливает их широкое применение в реле. На электромагнитном принципе осуществляется работа реле тока (максимального и минимального), реле напряжения (максимального, минимального напряжения) сигнальные, промежуточные и другие, реле времени, реле частоты и другие типы реле, применяемые в схемах защиты, управления электроприводами, автоматики.
|
|
|
Промежуточный орган реле – пружина, исполнительный орган – контактная система.
В зависимости от хода якоря различают следующие типы реле: клапанного типа (якорь притягивается с внешней стороны магнитопровода), соленоидного типа (якорь втягивается внутрь), поворотного типа (якорь имеет внешнее поперечное движение относительно силовых линий магнитного поля).
Магнитная энергия и усилия на якоре электромагнитного реле определяются на основе расчетных формул для электромагнитных механизмов.
Действие функциональных органов электромагнитного реле можно проследить по схеме рис.15. Воспринимающий орган А преобразует входную величину (напряжение) U вх, поступающую на обмотку 2 магнитопровода 1, в промежуточную величину, т.е. в механическую силу якоря 3. Механическая сила якоря F я действует на контактную систему исполнительного органа В. Промежуточная величина – сила якоря F я, – пропорциональная входной величине U вх, сравнивается с заданным значением силы F пр развиваемой пружиной 9 промежуточного органа Б.
|
|
|
|

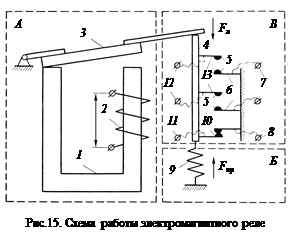
При U вх< U ср, F я< F пр держатель 4 подвижных контактов 13 не передвигается (U ср – напряжение срабатывания).
При U вх ³ U ср, F я ³ F пр подвижные контакты 13 исполнительного органа В приходят в движение. Обеспечивается замыкание замыкающих 4-5, 13-6 контактов и размыкание размыкающих контактов 10. При этом выходной параметр изменяется скачкообразно. Сопротивление между точками управляемых цепей: между клеммами 12-7 сопротивление скачкообразно меняется от ∞ до 0; между клеммами 11-8 – от 0 до ∞.
Дата добавления: 2016-01-04; просмотров: 159; Мы поможем в написании вашей работы! |

Мы поможем в написании ваших работ!