Естественные электромеханические и механические характеристики двигателей постоянного тока независимого возбуждения







Построение естественных электромеханических и механических характеристик двигателей постоянного тока независимого возбуждения







Искусственные электромеханические и механические характеристики двигателейпостоянного тока независимого возбуждения при изменении сопротивления цепи якоря
Искусственные характеристики, полученные путем введения добавочных резисторов в цепь якоря, называются реостатными характеристиками двигателя. Схема включения резистора для получения реостатных характеристик представлена на рис.3.5,а. При этом суммарное сопротивление якорной цепи увеличивается:

Соответственно ограничивается ток короткого замыкания

и уменьшается модуль жесткости статической механической характеристики

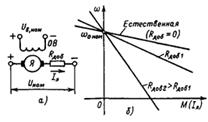

Скорость идеального холостого хода остается неизменной w0=w0.ном, а между током и моментом, если не учитывать реакцию якоря, сохраняется пропорциональность М=с·Iя, поэтому механические и электромеханические реостатные характеристики двигателя отличаются друг от друга только масштабом по оси абсцисс.
Семейство механических и электромеханических характеристик двигателя для ряда значений Rдоб представлено на рис.3.5,б. Введение резисторов в цепь якоря двигателя является простейшим средством ограничения тока при различных переходных процессах и используется для этой цели во всех случаях при питании двигателя от сети.
Увеличение сопротивления якорной цепи RяS из-за введения добавочных сопротивлений Rдоб уменьшает жесткость механических характеристик в режиме динамического торможения так же, как и в двигательном режиме. Аналогично изменяется модуль жесткости механических характеристик динамического торможения и при ослаблении поля двигателя. Механические характеристики, соответствующие различным Rдоб, представлены на рис.3.8 б

Рис. 3.8
Искусственные электромеханические и механические характеристики двигателей постоянного тока независимого возбуждения при изменении напряжения якоря
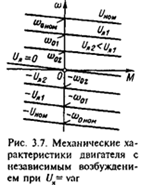

Изменение напряжения, подведенного к якорю двигателя при номинальном потоке, является в регулируемом электроприводе постоянного тока основным управляющим воздействием. Как правило, изменение напряжения Uя возможно только в сторону уменьшения по сравнению сноминальным, причем для мощных двигателей это ограничение является жестким, так как допустимое по условиям работы коллектора повышение напряжения невелико. Ряд двигателей краново-металлургических серий рассчитан на возможную работу с напряжением Uя=2Uном, однако это является исключением из общего правила. Как следует из (3.10), при изменении Uя пропорционально изменяется скорость идеального холостого хода двигателя, а жесткость механических характеристик при любом уровне напряжения одинакова, поэтому механические характеристики при Uя=var имеют вид параллельных прямых, показанных на рис.3.7. В отличие от ослабления поля изменение напряжения на якоре позволяет не только изменять скорость, но и ограничивать ток короткого замыкания. Плавное повышение напряжения на якоре от 0 до Uномобеспечивает наиболее благоприятные условия пуска двигателя.
В представленном на рис.3.7 семействе характеристик определенным своеобразием отличается характеристика, соответствующая Uя=0. Так как энергия к якорной цепи от внешнего источника не подводится, эта характеристика проходит через начало координат и полностью располагается только во втором и четвертом (тормозных) квадрантах. При наличии активной нагрузки, приложенной к валу, якорь двигателя приводится во вращение за счет подведенной со стороны механизма механической мощности. Под действием возрастающей ЭДС двигателя в якорной цепи, замкнутой через источник питания накоротко, начинает протекать ток и машина развивает тормозной момент, противодействующий движущему моменту активной нагрузки. Это режим динамического торможения, в котором двигатель работает генератором на сопротивление якорной цепи. В общем случае, когда сеть имеет нерегулируемое напряжение, т. е. Uс=Uном=const, для осуществления режима динамического торможения двигатель должен быть отключен от сети и его якорь замкнут на внешний резистор Rдоб.
Дата добавления: 2018-02-15; просмотров: 990; Мы поможем в написании вашей работы! |

Мы поможем в написании ваших работ!