Типовые статические нагрузки электропривода
Состав и назначение систем автоматизированного электропривода.
Электроприводом (часто автоматизированным) называется электромеханическое устройство, предназначенное для приведения в движение рабочих органов машин и управления их технологическими процессами, состоящий из передаточного устройства, электродвигателя, преобразовательного и управляющего устройств.
Выделяют три основных элемента: 1) механическая часть привода, включающая передаточный механизм и исполнительный механизм (он же РО). Предназначена для передачи механической энергии к исполнительному органу рабочей машины и для изменения вида и скорости движения и усилия (момента вращения). 2) электродвигательное устройство (ЭМП), предназначенное для преобразования электрической энергии в механическую или механическую в электрическую. 3) система управления (управляющее устройство), состоящая из силовой преобразовательной части, управляющего устройства, задающего устройства и датчиков обратных связей. Интеллектуальная часть электропривода.

Рис. 1.1. Структурная схема автоматизированного электропривода
Индивидуальный автоматизированный электропривод получил широкое распространение в самых различных областях жизни – от промышленного производства до сферы быта. Широта применения определяется большим диапазоном мощностей и большими возможностями по автоматизации и управлению, а также энергоэффективности электропривода. ЭП обеспечивает большие возможности по регулированию потока энергии. Находят применение современные системы программного управления технологическими процессами, устройства, оптимизирующие по каким либо критериям работу электропривода и механизма, развивается использование принципов адаптивного автоматического управления.
Уравнение движения электропривода, ввод т анализ.
Когда момент, развиваемый двигателем, равен моменту сопротивления исполнительного органа, скорость привода постоянна.
Однако во многих случаях привод ускоряется или замедляется, т.е. работает в переходном режиме.
Переходным режимом электропривода называют режим работы при переходе от одного установившегося состояния к другому, когда изменяются скорость, момент и ток.
Причинами возникновения переходных режимов в электроприводах является изменение нагрузки, связанное с производственным процессом, либо воздействие на электропривод при управлении им, т.е. пуск, торможение, изменение направления вращения и т.п., а также нарушение работы системы электроснабжения.
Уравнение движения электропривода должно учитывать все моменты, действующие в переходных режимах.
В общем виде уравнение движения электропривода может быть записано следующим образом [1]:
 . (2.9)
. (2.9)
При положительной скорости уравнение движения электропривода имеет вид
 . (2.10)
. (2.10)
Уравнение (2.10) показывает, что развиваемый двигателем вращающий момент  уравновешивается моментом сопротивления
уравновешивается моментом сопротивления  и динамическим моментом
и динамическим моментом  . В уравнениях (2.9) и (2.10) принято, что момент инерции привода
. В уравнениях (2.9) и (2.10) принято, что момент инерции привода  является постоянным, что справедливо для значительного числа исполнительных органов.
является постоянным, что справедливо для значительного числа исполнительных органов.
Из анализа уравнения (2.10) видно:
1) при >  ,
,  , т.е. имеет место ускорение привода;
, т.е. имеет место ускорение привода;
2) при <  ,
,  , т.е. имеет место замедление привода (очевидно, замедление привода может быть и при отрицательном значении момента двигателя);
, т.е. имеет место замедление привода (очевидно, замедление привода может быть и при отрицательном значении момента двигателя);
3) при =  ,
,  ; в данном случае привод работает в установившемся режиме.
; в данном случае привод работает в установившемся режиме.
Динамический момент (правая часть уравнения моментов) проявляется только во время переходных режимов, когда изменяется скорость привода. При ускорении привода этот момент направлен против движения, а при торможении он поддерживает движение.
3.Понятие о статической устойчивости работы привода.
Под статической устойчивостью, вообще говоря, понимают способность системы самостоятельно восстановить исходный режим работы при малом возмущении. Статическая устойчивость является необходимым условием существования установившегося режима работы системы, но отнюдь не предопределяет способности системы продолжать работу при резких нарушениях режима, например при коротких замыканиях.
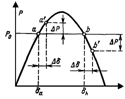
Рис3.1 – Изменение мощности при приращениях угла.
Итак, точка а и, любая другая точка на возрастающей части синусоидальной характеристики мощности отвечают статически устойчивым режимам и, наоборот, все точки падающей части характеристики — статически неустойчивым. Отсюда вытекает следующий формальный признак статической устойчивости рассмотренной простейшей системы: приращения угла  и мощности генератора Р должны иметь один и тот же знак, т. е.
и мощности генератора Р должны иметь один и тот же знак, т. е.  или, переходя к пределу:
или, переходя к пределу:

| (3.1) |
Производная  , как известно, носит название синхронизирующей мощности, и, следовательно, критерием статической устойчивости системы в рассмотренных условиях является положительный знак синхронизирующей мощности. Производная мощности по углу согласно (2.1) равна:
, как известно, носит название синхронизирующей мощности, и, следовательно, критерием статической устойчивости системы в рассмотренных условиях является положительный знак синхронизирующей мощности. Производная мощности по углу согласно (2.1) равна:

| (3.2) |
Она положительна при < 90° (рис. 3.3). В этой области и возможны устойчивые установившиеся режимы работы системы. Критическим с точки зрения устойчивости в рассматриваемых условиях (при чисто индуктивной связи генератора с шинами приемной системы) является значение угла = 90°, когда достигается максимум характеристики мощности.
Метод малых отклонений, или малых колебаний широко используется при анализе устойчивости системы.
Следует отметить, что причиной нарушения статической устойчивости может быть работа автоматики при ошибке в установке регулировочных коэффициентов или выходе режима за пределы зоны устойчивости.
Типовые статические нагрузки электропривода
Электромагнитный момент двигателя является выходной величиной для электрической части системы (см. рис.В.2) и входной для механической, поэтому при рассмотрении процессов в системе он выделен из всех действующих на механическую часть внешних моментов. Все остальные силы и моменты определяют статическую нагрузку электропривода Mс. Во всех трех расчетных схемах (рис.1.2) в соответствии с (1.13) эта нагрузка неизменна, так как для двухмассовой системы Mc1 + Мс2=Mс, а для трехмассовой Mс1 + Мс2 + Mс3=Mс. Иными словами, при учете упругости суммарная нагрузка неизменна, но уточняется, к каким массам системы приложены отдельные составляющие нагрузки.
Все силы и моменты нагрузки, приложенные к механической части электропривода, делятся на силы и моменты механических потерь и силы и моменты, представляющие полезные нагрузки исполнительного механизма. Для схемы рис 1.1,б в общем виде можно записать
Mc=DMS+Mпол.S

Полезная нагрузка является одним из главных факторов, связывающих электропривод с технологическим процессом приводимого в движение механизма Силы и моменты полезной нагрузки в различных механизмах имеют различный характер Для возможности обобщенного учета их влияния необходимо их классифицировать, выделив ограниченное число типовых нагрузок.
Так как для электропривода имеет важное значение, как зависит момент статической нагрузки от скорости, в дальнейшем используется понятие механической характеристики исполнительного механизма, представляющей собой зависимости Mс=f(w) и w=f(Mс).
По характеру взаимодействия с электроприводом все силы и моменты делятся на активные и реактивные
Активными силами и моментами называются силы и моменты, создаваемые внешними по отношению к двигателю источниками механической энергии независимо от движения электропривода, например потенциальной энергией перемещаемых по вертикали грузов, энергией ветра и т.п. На рис.1.3,a упрощенно показан подъемный механизм, нагрузкой которого является приведенный момент силы тяжести груза G:

Реактивными силами и моментами называются силы и моменты сопротивления движению, возникающие как реакция на активный движущий момент, развиваемый двигателем, либо любой другой активный движущий момент, например обусловленный силой тяжести или силой инерции. Эти нагрузки всегда действуют в направлении, противоположном движению электропривода, и изменяют свое направление при изменении знака скорости.
Таким образом, все реактивные силы и моменты зависят от скорости. По характеру этой зависимости различают нагрузки типа сухого трения, типа вязкого трения и вентиляторного типа.
Силы и моменты сухого трения неизменны по модулю, но скачком изменяют свой знак при изменении знака скорости
Мс=|Mc| sign w
5) Приведение моментов статической нагрузки к валу двигателя.Статические моменты рабочей машины, приведенные к валу двигателя, без учета потерь в редукторе (Рη= 1), рассчитываются по формуле

Статические моменты на валу с учетом потерь в редукторе (Рh< 1) рассчитывают в зависимости от режима работы электропривода. Статический момент на валу в двигательном режиме

При работе электропривода в тормозных режимах потери в редукторе вызывают уменьшение нагрузки двигателя, при этом моменты на валу определяют по формуле

В двигательном режиме работы двигателя статический момент (D ХM)увеличивается на величину момента потерь холостого хода ( покрывается за счет электромагнитного момента двигателя).
При работе двигателя в тормозном режиме статический момент D ХM)уменьшается на величину момента потерь холостого хода ( покрывается за счет статического момента рабочего органа)
Таким образом, приведенные статические моменты системы электропривод – рабочая машина рассчитывают для каждого участка с учетом режима работы электропривода по формуле
При этом в статическом моменте учитываются не только силы сопротивления движению в рабочей машине, но также и потери в редукторе, и механические потери в двигателе. Суммарный приведенный к валу двигателя момент инерции системы может быть рассчитан по соотношению

где JД – момент инерции ротора двигателя; – коэффициент, учитывающий момент инерции остальных элементов
d электропривода: муфт, тормозного шкива, редуктора и др.;

приведенный к валу двигателя суммарный момент инерции движущихся исполнительных органов рабочей машины и связанных с ними движущихся масс (грузов, заготовок и т.п.)
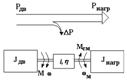
6)Приведение моментов инерции к валу двигателя.Обычно между двигателем и нагрузкой находится какая-либо механическая передача т.е. имеется несколько различных валов со своими моментами и скоростями. Для сведения любой реальной системы к простейшей модели на рис. 1 нужно выполнить ряд операций, называемых приведением моментов и моментов инерции к некоторому выбранному в качестве основного валу, обычно - к валу двигателя. Иными словами, некоторую реальную механическую систему, например, показанную на рис. 2,а, нужно заметить эквивалентной системой (рис. 2,б), такой, чтобы эта замена не отразилась на поведении части системы, оставленной неизменной (двигателя).
a)
б)
Рис. 2. К приведению Мсм и Jнагр к валу двигателя
Примем следующие допущения: система жесткая, без зазоров; моменты инерции, относящиеся к основным валам, неизменны, относящиеся к промежуточным валам, если такие есть, равны нулю; отношение  и КПД передачи
и КПД передачи  - постоянны.
- постоянны.
В реальной и приведенной системах должны остаться неизменной мощность, развиваемая двигателем  , т.е. в нашем случае, когда потери покрываются двигателем (Ми
, т.е. в нашем случае, когда потери покрываются двигателем (Ми  направлены согласно):
направлены согласно):
 ,
,
откуда
 . (2)
. (2)
Потери всегда покрываются той частью системы, которая создает движение, поэтому при обратном потоке мощности - от нагрузки к двигателю
 . (2,а)
. (2,а)
В реальной и приведенной системах должны быть одинаковы запасы кинетической энергии, т.е.
 ,
,
или
 .
.
Дата добавления: 2018-02-15; просмотров: 2173; Мы поможем в написании вашей работы! |

Мы поможем в написании ваших работ!