Режимы торможения асинхронных двигателей
Рекуперативное торможение осуществляется при вращении ротора активным моментом со скоростью ω>ω0(рисунок 6.1). Этот же режим будет иметь место, если при вращении ротора со скоростью ω уменьшить частоту вращения поля статора. Роль активного момента здесь будет выполнять момент инерционных сил вращающегося ротора.
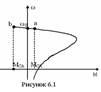
 .Рекуперативное торможение осуществляется при вращении ротора активным моментом со скоростью ω>ω0 (рисунок 6.1).
.Рекуперативное торможение осуществляется при вращении ротора активным моментом со скоростью ω>ω0 (рисунок 6.1).
Этот же режим будет иметь место, если при вращении ротора со скоростью ω уменьшить частоту вращения поля статора. Роль активного момента здесь будет выполнять момент инерционных сил вращающегося ротора.
Для осуществления торможения противовключением необходимо поменять местами две любые фазы статора (рисунок 6.3,а).
 При этом меняется направление вращения поля, машина тормозится в режиме противовключения, а затем реверсируется.
При этом меняется направление вращения поля, машина тормозится в режиме противовключения, а затем реверсируется.
Режимы торможения асинхронных двигателей
Динамическое торможениепредставляет собой генераторный режим отключенного от сети переменного тока АД, к статору которого подведен постоянный ток, а ротор замкнут на сопротивление (рисунок 6.5).
Этот режим применяется в ряде случаев, когда после отключения АД от сети требуется быстрая остановка без реверса.
25. Режимы торможения асинхронных двигателей. Торможение АД противовключением.
Асинхронный двигатель может работать в следующих тормозных режимах: в режиме рекуперативного торможения, противовключения и динамическом. Режим рекуперативного торможения осуществляется в том случае, когда скорость ротора асинхронного двигателя превышает синхронную. Для динамического торможения обмотки статора двигатель отключают от сети переменного тока и подключают к источнику постоянного тока. Обмотка ротора при этом может быть закорочена, или в ее цепь включаются добавочные резисторы.
Торможение асинхронного электродвигателя противовключением
Перевод асинхронного двигателя в режим торможения противовключением может быть выполнен двумя путями. Один из них связан с изменением чередования двух фаз питающего электродвигатель напряжения.
Допустим, что двигатель работает на характеристике 1 (рис. 1 б) при чередовании фаз напряжения АВС. Тогда при переключении двух фаз (например, В и С) он переходит на характеристику 2, участок аб которой соответствует торможению противовключением.
Обратим внимание на то обстоятельство, что при противовключении скольжение асинхронного двигателя изменяется от S = 2 до S = 1.
Ротор при этом вращается против направления движения поля и постоянно замедляется. Когда скорость спадает до нуля, двигатель должен быть отключен от сети, иначе он может перейти в двигательный режим, причем ротор его будет вращаться в направлении, обратном предыдущему.
При торможении противовключением токи в обмотке двигателя могут в 7–8 раз превышать соответствующие номинальные токи. Заметно уменьшается коэффициент мощности двигателя. О КПД в данном случае говорить не приходится, т.к. и преобразуемая в электрическую механическая энергия и энергия, потребляемая из сети, рассеиваются в активном сопротивлении ротора, и полезно используемой энергии в данном случае нет.
Короткозамкнутые двигатели кратковременно перегружаются по току. Правда, у них при (S > 1) вследствие явления вытеснения тока заметно возрастает активное сопротивление ротора. Это приводит к уменьшению и увеличению момента.
С целью увеличения эффективности торможения двигателей с фазным ротором в цепи их роторов вводят добавочные сопротивления, что позволяет ограничить токи в обмотках и увеличить момент.
Другой путь торможения противовключением может быть использован при активном характере момента нагрузки, который создается, например, на валу двигателя грузоподъемного механизма.
Допустим, что требуется осуществить спуск груза, обеспечивая его торможение с помощью асинхронного двигателя. Для этого двигатель путем включения в цепь ротора добавочного резистора (сопротивления) переводится на искусственную характеристику (прямая 3 на рис. 1).
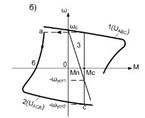 Вследствие превышения моментом нагрузки Мс пускового момента Мп двигателя и его активного характера груз может опускаться с установившейся скоростью –ωуст2. В этом режиме торможение скольжения асинхронного двигателя может изменяться от S = 1 до S = 2.
Вследствие превышения моментом нагрузки Мс пускового момента Мп двигателя и его активного характера груз может опускаться с установившейся скоростью –ωуст2. В этом режиме торможение скольжения асинхронного двигателя может изменяться от S = 1 до S = 2.
Дата добавления: 2018-02-15; просмотров: 781; Мы поможем в написании вашей работы! |

Мы поможем в написании ваших работ!