Поясните с помощью структурной схемы принцип работы программируемого контроллера.


Уравнение равновесия напряжений для якорной цепи электрической машины.
Uя = E + Iя*Rя
Uя – напряжение, приложенное к якорю,
E – ЭДС двигателя,
Iя – ток якоря,
Rя – омическое сопротивление якоря.
Дополнительные формулы:
Uя/Iя = E/Iя + Rя
Uя/Iя= Rц
E/Iя = Rн
Rц = Rн + Rя
Rц – полное сопротивление цепи
Rн – электрический резистивный эквивалент полезной механической нагрузки на валу двигателя.
Е = Ke ω – ЭДС пропорциональна круговой циклической частоте вращения вала.
М = Km Iя – момент на валу двигателя пропорционален току.
Ke,Km – коэффициенты, определяемые конструкцией двигателя.
Рполн = Рнагруз + Рпотерь
Где: Рполн = Uя Iя; – полная мощность.
Рнагруз = E Iя; – механическая нагрузка на валу двигателя.
Рпотерь =(Iя)2 Rя; – потери на нагрев якоря.
Рнагруз = E Iя,
Из механики : Рнагруз = ω М – механическая нагрузка на валу двигателя,
тогда: E Iя = ω М;
или: Ke ω Iя = ω М,
М = Ke Iя,
М = Km Iя,
отсюда: Ke = Km
Ke = (N Ф)/(2 пи), где N – количество активных проводников ротора,
Ф – магнитный поток
Что такое режим идеального холостого хода электрической машины? Чему равен ток якоря и какое соотношение между напряжением и ЭДС в данном режиме?
Идеальный холостой ход. Под холостым ходом двигателя понимается его работа без нагрузки на валу. Из-за механических потерь частота вращения ротора отличается от частоты вращения поля на 1—2 %. Если принять потери равными нулю, тогда частота вращения ротора равна частоте вращения поля и ток в обмотке ротора отсутствует. Такой режим называется режимом идеального холостого хода.
Ток холостого хода. В режиме реального холостого хода ток холостого хода Ix статора примерно на порядок больше тока холостого хода трансформатора. Это объясняется наличием воздушного зазора между ротором и статором, который существенно увеличивает магнитное сопротивление потоку в магнитопроводе. Если в трансформатореIx составляет примерно 2—8 % номинального тока первичной обмотки, то в статоре трехфазного асинхронного двигателя Ix составляет 20— 45 % номинального тока статора.
Что такое режим короткого замыкания электрической машины? Чему равна скорость и ЭДС в данном режиме?
В режиме короткого замыкания генераторов сопротивление нагрузки равно нулю. В режиме короткого замыкания двигателей равна нулю частота вращения. Режим короткого замыкания характерен для начального момента пуска двигателя из неподвижного состояния. При включении обмотки статора на номинальное напряжение ток двигателя достигает больших значений, поэтому длительный режим короткого замыкания опасен для машин, не рассчитанных на работу при таких условиях.
В каких квадрантах системы координат располагаются механические характеристики электрической машины в двигательном и генераторном режимах?
Условие перевода электрической машины из двигательного режима в режим рекуперативного торможения. Какие при этом происходят преобразования энергии?
Рекуперативное торможение возникает во всех случаях, когда скорость вращения двигателя ω оказывается выше скорости идеального холостого хода  . При этом
. При этом 
 , т.е. ЭДС двигателя становится больше напряжения U источника питания и ток якоря меняет свое направление. Последнее очевидно из равенства:
, т.е. ЭДС двигателя становится больше напряжения U источника питания и ток якоря меняет свое направление. Последнее очевидно из равенства:

Отрицательное значение тока свидетельствует о том, что двигатель работает генератором параллельно с питающей сетью, создавая при этом тормозной момент на своем валу:
 .
.
Рекуперативное торможение очень экономично, поскольку механическая энергия, поступающая на вал двигателя, за вычетом потерь, отдается в сеть.
Поскольку режим рекуперации возникает без изменения схемы включения двигателя, для данного режима остаются справедливыми уравнения электромеханической и механические характеристики выведенные ранее. Следовательно, механические характеристики в режиме рекуперации являются продолжением характеристик двигательного режима.
Этот способ торможения возможен, например, в приводах транспортных и подъёмных механизмов при спуске груза и некоторых способах регулирования скорости (тепловые двигатели после ремонта), когда двигатель, переходя к низким скоростям, проходит значение  . Но торможение этим способом может быть осуществлено в ограниченных пределах, т.к. не во всех приводах возможно соблюдения условия .
. Но торможение этим способом может быть осуществлено в ограниченных пределах, т.к. не во всех приводах возможно соблюдения условия .
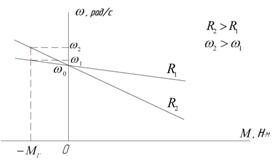
Рисунок 2.7 Механические характеристики ДПТ независимого возбуждения в режиме рекуперативного торможения
Необходимо отметить, что чем больше сопротивление в якорной цепи двигателя, тем выше его скорость вращения при одном и том же тормозном моменте (рисунок 2.7).
Дата добавления: 2018-02-15; просмотров: 1728; Мы поможем в написании вашей работы! |

Мы поможем в написании ваших работ!