Электромеханический привод поступательного движения по X -координате
Согласно ТЗ, выбран привод DGE-25-600-ZR-RF-LK-RV-GK, приведённый на рисунке 1.5.1, а его характеристики на рисунке 1.5.2.
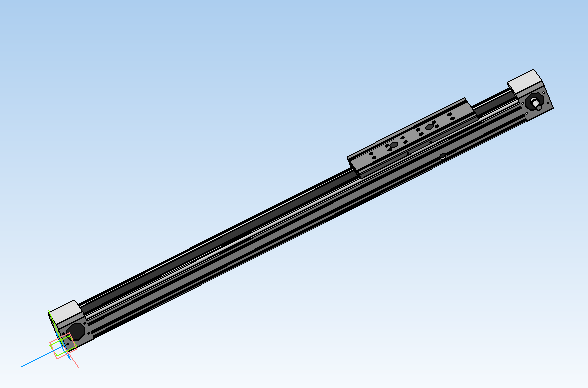
Рисунок 1.5.1 - Привод DGE-25-600-ZR-RF-LK-RV-GK
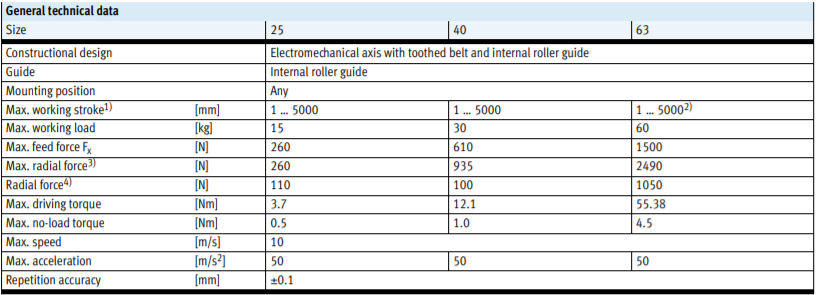
Рисунок 1.5.2 - Данные привода DGE-25-600-ZR-RF-LK-RV-GK
Определение присоединительных масс к каретке
Присоединительная масса к каретке 

 - суммарная масса груза, захвата и поворотного модуля с двигателем;
- суммарная масса груза, захвата и поворотного модуля с двигателем;
 - масса линейного привода по оси Z;
- масса линейного привода по оси Z;
 - масса линейного привода по оси Y.
- масса линейного привода по оси Y.
Согласно таблице, на рисунке 1.6.1, выбранный привод подходит.
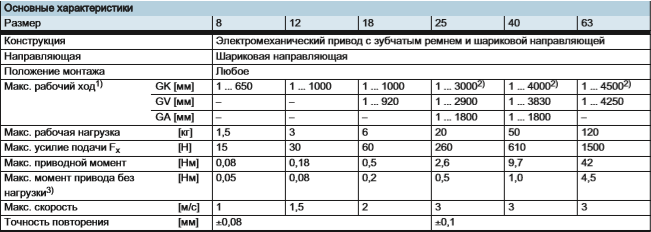
Рисунок 1.6.1 - Основная характеристика привода
Расчёт полного хода каретки
Согласно ТЗ, рабочий ход каретки  Полный ход каретки
Полный ход каретки 
 - запас хода каретки с обеих сторон.
- запас хода каретки с обеих сторон.
Согласно графику, на рисунке 1.6.2, заданные скорости и длины хода соответствует параметрам выбранного привода.
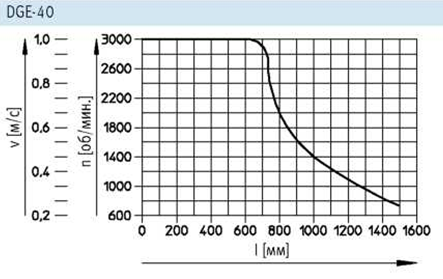
Рисунок 1.6.2 - Зависимость максимальной допустимой скорости или скорости вращений мотора от длины хода
Кинематический расчёт привода
Фаза разгона. Время 
 - постоянная скорость движения каретки,
- постоянная скорость движения каретки,  ;
;
 - ускорение каретки,
- ускорение каретки,  .
.
Путь 
Фаза движения с постоянной скоростью. Время 
Путь 
 - рабочий ход каретки, м.
- рабочий ход каретки, м.
Время цикла перемещения 
Относительное время перемещения:

Расчёт приведённого к входному валу момента инерции
Приведённый к входному валу момент инерции:

 - приведённый к входному валу момент инерции каретки,
- приведённый к входному валу момент инерции каретки,  ;
;
|
|
|
 - приведённый к входному валу момент инерции ходового винта,
- приведённый к входному валу момент инерции ходового винта,  ;
;
 - рабочий ход каретки, м;
- рабочий ход каретки, м;
 - приведённый к входному валу момент инерции на 1 кг присоединённой к каретке массы,
- приведённый к входному валу момент инерции на 1 кг присоединённой к каретке массы,  ;
;
 - присоединённая к каретке масса, кг.
- присоединённая к каретке масса, кг.
Расчёт нагрузки на линейный модуль
Пусть каретка находится в среднем положении. Принимается система координат, в которой ось X совпадает с направляющей линейного модуля, ось Y параллельна опорной плоскости привода, ось Z проходит через центр каретки. Координаты центра масс определяются с помощью САПР и представлены на рисунке 1.6.4.
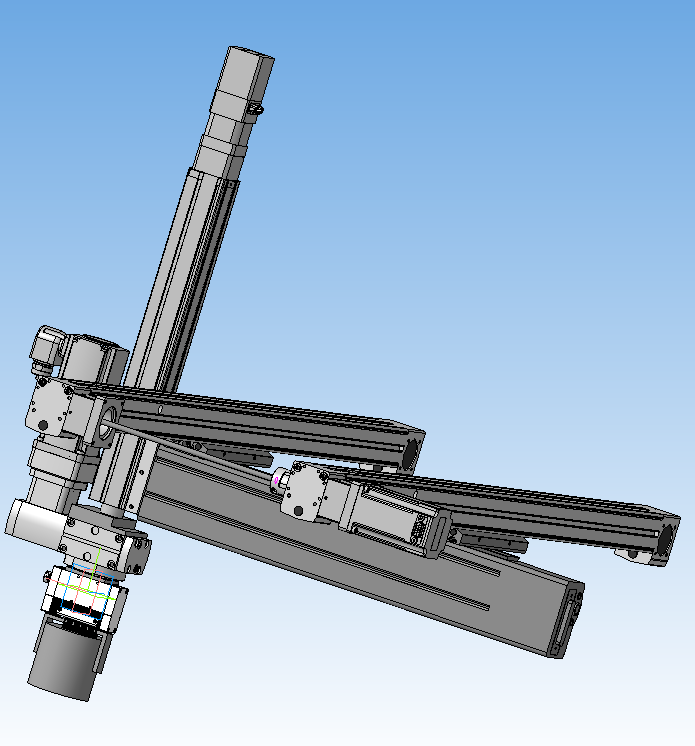
Рисунок 1.6.4 - Центр масс системы
 .
.
Вертикальная составляющая от сил тяжести:

Сила, действующая по оси X:

По величине  и
и  определяются действующие по осям моменты:
определяются действующие по осям моменты:




Проверочный расчёт выбранного двигателя
Фаза  . Каретка движется с постоянной скоростью. Статическая сила сопротивлению движения каретки при горизонтальном положении направляющей равна
. Каретка движется с постоянной скоростью. Статическая сила сопротивлению движения каретки при горизонтальном положении направляющей равна

 - КПД шариковых направляющих, в зависимости от требований точности
- КПД шариковых направляющих, в зависимости от требований точности  .
.
Приведенный к входному валу привода статический момент учитывает потери в шариковой винтовой паре и равен

 - КПД шариковой винтовой пары.
- КПД шариковой винтовой пары.  ;
;
|
|
|
 - шаг шариковой винтовой пары привода.
- шаг шариковой винтовой пары привода.
Фаза  .Каретка разгоняется с заданным ускорением. Приведенный к входному валу привода момент равен
.Каретка разгоняется с заданным ускорением. Приведенный к входному валу привода момент равен

 - динамический момент, приведенный к входному валу привода;
- динамический момент, приведенный к входному валу привода;
 .
.
Динамический момент

 - массовый момент инерции каретки, груза и винтовой шариковой пары, приведенный к входному валу привода;
- массовый момент инерции каретки, груза и винтовой шариковой пары, приведенный к входному валу привода;
 - момент инерции двигателя с присоединительной муфтой;
- момент инерции двигателя с присоединительной муфтой;
 - ускорение входного вала привода,
- ускорение входного вала привода,  ;
;

 - ускорение каретки, .
- ускорение каретки, .
Фаза  . Питание с двигателя снимается, момент нагрузки отсутствует.
. Питание с двигателя снимается, момент нагрузки отсутствует.
Как видно из приведенных расчетов максимальный момент действует при разгоне двигателя.
Каталожный момент удержания  для шагового двигателя EMMS-ST-57-M-S-G2 составляет 1,4 Нм.
для шагового двигателя EMMS-ST-57-M-S-G2 составляет 1,4 Нм.
При заданной постоянной скорости движения каретки равной для фазы 2 угловая скорость двигателя

Выбранный двигатель удовлетворяет нагрузочным и скоростным режимам работы привода.
Дата добавления: 2021-06-02; просмотров: 140; Мы поможем в написании вашей работы! |

Мы поможем в написании ваших работ!