Особенности электрических захватов
Оглавление
Аннотация . 2
Техническое задание . 4
Введение . 5
Выбор компонентов манипулятора . 6
Груз . 6
Модуль захвата . 8
Особенности электрических захватов . 8
Геометрические размеры захвата. 9
Расчет момента инерции захвата . 10
D модель захвата . 10
Общие характеристики поворотного привода ERMB .. 11
Нагрузочные характеристики поворотного привода . 12
Время позиционирования . 12
Технические характеристики поворотного привода . 13
Поворотный механизм захвата . 14
Кинематический расчет привода . 15
Линейный привод . 18
Обоснование выбранного линейного привода c шарико-винтовой направляющей . 18
Расчёт времени выполнения операции . 19
Проверочный расчёт выбранного двигателя . 21
Электромеханический привод поступательного движения по Y -координате . 22
Расчёт времени выполнения операции . 24
Электромеханический привод поступательного движения по X -координате . 25
Определение присоединительных масс к каретке . 26
Расчёт полного хода каретки . 27
Кинематический расчёт привода . 27
Расчёт приведённого к входному валу момента инерции . 28
Расчёт нагрузки на линейный модуль . 28
Проверочный расчёт выбранного двигателя . 30
Структура управления манипулятором .. 32
Структурные схемы частей манипулятора . 32
|
|
|
Расчет переходного процесса при пуске двигателя . 33
Выводы по разделу . 35
Выводы .. 36
Список использованных источников . 37
Аннотация
Курсовая работа содержит 37 страниц, 28 рисунков, 5 основных таблицы. Список использованных источников состоит из 3-х наименований.
В курсовой работе рассматривается манипулятор, состоящий из захвата HIWIN XEG-16, поворотного модуля ERMB-20, привода EPCC-BS-45-280-3P-A, HME-16-200 и двух DGE-25-600-ZR-RF. Производится выбор элементов манипулятора согласно ТЗ. Также производится расчет переходного процесса при пуске двигателя.
Техническое задание
Таблица 1 – Техническое задание
| Вариант | 15 | ||
| Масса груза, кг | 2(Ц) | ||
| Угол поворота захват, град | 240 | ||
| Угловая скорость поворота захвата, с-1 | 20 | ||
| Двигатель поворота захвата | С | ||
| Привод по оси Z | KF | ||
| Ход по Z, мм | 280 | ||
| Скорость по Z, м/с | 0.3 | ||
| Двигатель хода по оси Z | Ш | ||
| Привод по оси Y | Л | ||
| Ход по Y, мм | 200 | ||
| Скорость по Y м/с | 0.1 | ||
| Двигатель хода по оси Y | - | ||
| Привод по оси X | RZ | ||
| Ход по X, мм | 600 | ||
| Скорость по X, м/с | 0.1 | ||
| Двигатель хода по оси X | Ш | ||
| Примечание: Ш-шаговый двигатель; С-серводвигатель ; Л- линейный модуль HME; KF- линейный модуль с шариковой направляющей и шариковинтовым приводом DGE-…-SP-KF ; RZ- линейный модуль с шариковой направляющей и приводом с зубчатым ремнем DGE-…-SP-RZ.
Материал груза - Сталь 40Х. Форма груза : Ц-цилиндр с высотой равной диаметру; | |||
Введение
В курсовой работе проектируется электрический манипулятор, собираемый из отдельных модулей: линейных приводов
Задача состоит в проектировании автоматизированного манипулятора согласно техническому заданию. Проектирование включает в себя:
· Выбор составных элементов манипулятора, обосновывая с технической стороны.
· Проектировочные расчеты кинематических и массогабаритных параметров элементов манипулятора.
· Конструирование механизмов манипулятора с выполнением 3D модели.
Выбор компонентов манипулятора
Груз
В соответствии с техническим заданием (ТЗ, см. табл.) материал груза – Сталь 40х. Плотность Стали 40х равна 7820 кг/м³. Расчет объема цилиндра находится по формуле:
| (1) |
| где | |
|
| |
 - радиус цилиндра;
- радиус цилиндра; – высота цилиндра.
– высота цилиндра.Плотность материала определяется по формуле:

| (2) |
В объеме требуется определить габариты – радиус и высоту цилиндра. Известно, что, в соответствии с ТЗ высота цилиндра равна его диаметру, т.е.  где
где  – параметр, к которому приравниваются величины высоты и диаметра.
– параметр, к которому приравниваются величины высоты и диаметра.
|
|
|
Тогда, в соответствии с формулой (1):

В соответствии с формулой (2) выводится зависимость параметра от массы и плотности материала:



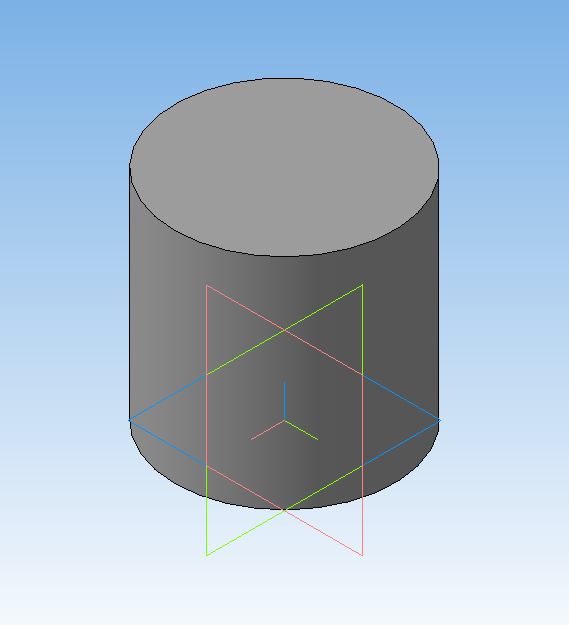
Рисунок 1.1.1 – Модель груза в Компас-3D
Расчет момента инерции груза производится по формуле:

| (3) |
Тогда, в соответствии с формулой (3):

| (4) |
| где m - масса захвата (см. ТЗ); | |
| a - ширина захвата, м; | |
| l - длина захвата, м. | |
Модуль захвата
Особенности электрических захватов
- Зажимное устройство может применяться к предметам, восприимчивым к легкому повреждению и деформации.
- Положение захвата проверяется датчиками безопасности на выходе, для проверки нахождения захвата в заданном диапазное.
- Усилие захвата может быть установлено с инкрементом в 5% в диапазоне от 40 до 100%.
- Позиционирование и регулирование можно производить с точностью до 0,01 мм.
- Скорость движения может быть в диапазоне от 1 до 100 мм/с с шагом винта 1 мм.
- Функция управления ускорением – рассчитывает время достижения заданной скорости.
- Возможность установить 30 точек позиционирования и нулевую точку.
|
|
|
Дата добавления: 2021-06-02; просмотров: 152; Мы поможем в написании вашей работы! |

Мы поможем в написании ваших работ!