Обоснование выбранного линейного привода c шарико-винтовой направляющей
Согласно ТЗ, выбран линейный привод EPCC-BS-45-280-3P-A, данные которого приведены на рисунке 1.4.1. 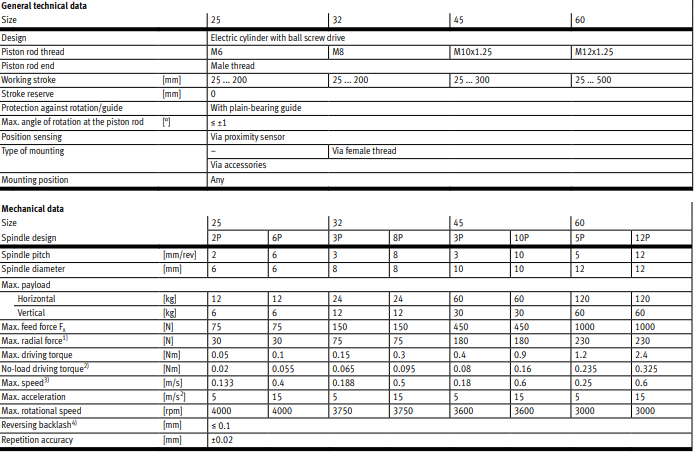
Рисунок 1.4.1 - Данные линейного привода
Линейный модуль EPCC-BS-45-280-3P-Aизображён на рисунке 1.4.2.
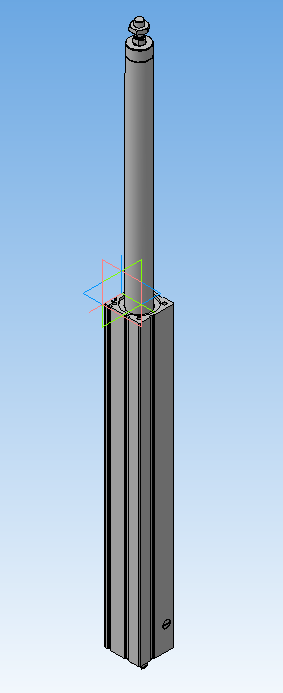
Рисунок 1.4.2 - EPCC-BS-45-280-3P-A
Расчёт времени выполнения операции
 - ход штока, м;
- ход штока, м;
 - средняя скорость штока, м/с.
- средняя скорость штока, м/с.
Проверка соответствия рассчитанного времени перемещения допустимому минимальному: согласно графику, на рисунке 1.4.3, рассчитанное время больше минимального допустимого.
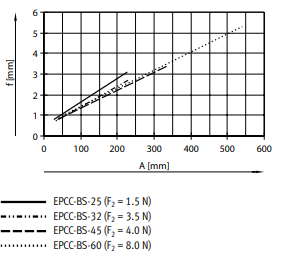
Рисунок 1.4.3 - График времени позиционирования линейного привода
3D модель модуля линейного привода приведена на рисунке 1.4.4.
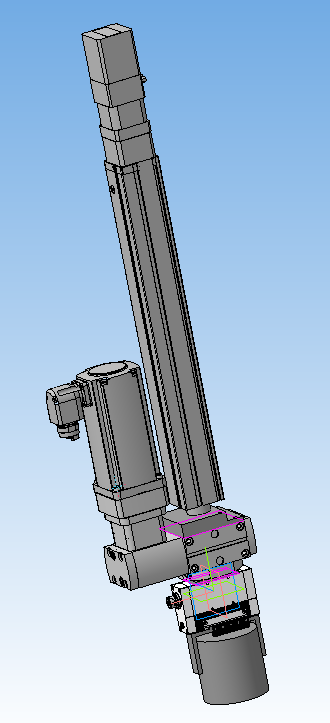
Рисунок 1.4.4 - Линейный привод в сборе
Проверочный расчёт выбранного двигателя
Фаза  . Каретка движется с постоянной скоростью. Статическая сила сопротивлению движения каретки при горизонтальном положении направляющей равна
. Каретка движется с постоянной скоростью. Статическая сила сопротивлению движения каретки при горизонтальном положении направляющей равна

 - КПД шариковых направляющих, в зависимости от требований точности
- КПД шариковых направляющих, в зависимости от требований точности  .
.
Приведенный к входному валу привода статический момент учитывает потери в шариковой винтовой паре и равен

 - КПД шариковой винтовой пары.
- КПД шариковой винтовой пары.  ;
;
 - шаг шариковой винтовой пары привода.
- шаг шариковой винтовой пары привода.
Фаза  .Каретка разгоняется с заданным ускорением. Приведенный к входному валу привода момент равен
.Каретка разгоняется с заданным ускорением. Приведенный к входному валу привода момент равен

 - динамический момент, приведенный к входному валу привода;
- динамический момент, приведенный к входному валу привода;
 .
.
Динамический момент

 - массовый момент инерции каретки, груза
- массовый момент инерции каретки, груза  и винтовой шариковой пары, приведенный к входному валу привода;
и винтовой шариковой пары, приведенный к входному валу привода;
|
|
|
 - момент инерции двигателя с присоединительной муфтой;
- момент инерции двигателя с присоединительной муфтой;
 - ускорение входного вала привода,
- ускорение входного вала привода,  ;
;

 - ускорение каретки,
- ускорение каретки,  .
.
Фаза  . Питание с двигателя снимается, момент нагрузки отсутствует.
. Питание с двигателя снимается, момент нагрузки отсутствует.
Как видно из приведенных расчетов, максимальный момент действует при разгоне двигателя.
Каталожный момент удержания  для шагового двигателя EMMS-ST-42-S-SB-G2 составляет 0.5 Нм.
для шагового двигателя EMMS-ST-42-S-SB-G2 составляет 0.5 Нм.
При заданной постоянной скорости движения каретки равной для фазы 2 угловая скорость двигателя

Выбранный двигатель удовлетворяет нагрузочным и скоростным режимам работы привода.
Электромеханический привод поступательного движения по Y -координате
Масса рассчитанного в прошлом пункте модуля с двигателем:


Согласно ТЗ, выбран линейный привод HME-16, данные которого приведены на рисунке 1.4.1.
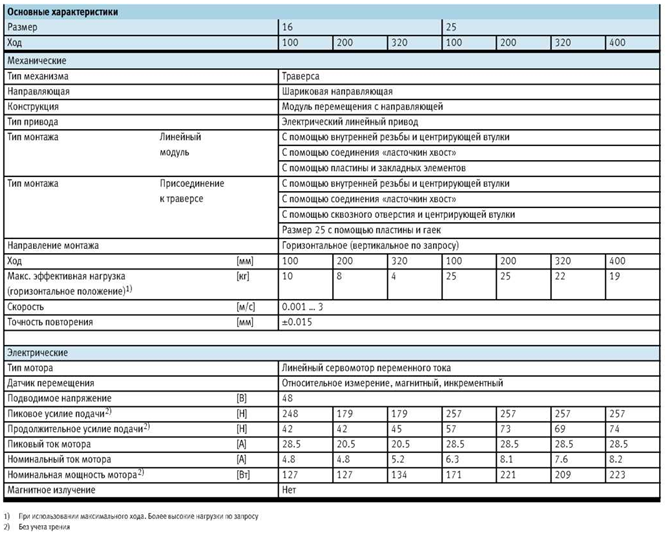
Рисунок 1.4.1 - Данные линейного привода
Линейный модуль HME-16-200 изображён на рисунке 1.4.2.
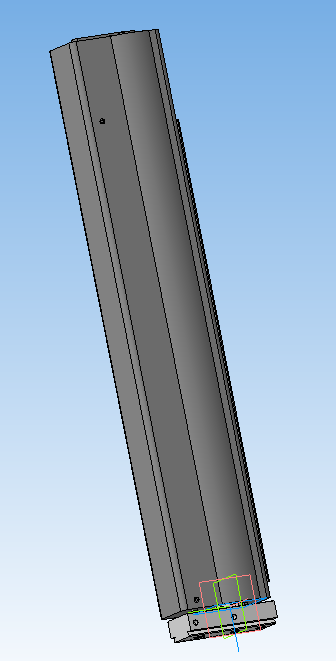
Рисунок 1.4.2 - HME-16-200
Расчёт времени выполнения операции
В соответствии с формулой:

| |
| где | |
|
| |
 – длина штока, м;
– длина штока, м; – скорость, м/с.
– скорость, м/с.
В соответствии с формулами:

| (19) | ||
| где
| |||
|
| |||
 принимается равным 1 м/с2;
принимается равным 1 м/с2; – заданная в ТЗ скорость движения каретки.
– заданная в ТЗ скорость движения каретки.

| (20) |
Принимая  и
и  в соответствии с заданным в ТЗ ходом каретки
в соответствии с заданным в ТЗ ходом каретки  определяется путь
определяется путь  , пройденный кареткой с постоянной скоростью, и время :
, пройденный кареткой с постоянной скоростью, и время :

Время цикла перемещения в соответствии с формулой:

Относительное время перемещения:
В соответствии с графиком (четвертая штриховая линия на рис. 1.4.3 ) при ходе, равном 200 мм в соответствии с ТЗ, минимальное время позиционирования составляет 330 мс, что удовлетворяет расчетным данным.
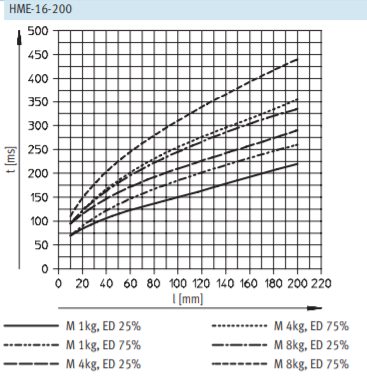
Рисунок 1.4.3 - График времени позиционирования линейного привода
Дата добавления: 2021-06-02; просмотров: 137; Мы поможем в написании вашей работы! |

Мы поможем в написании ваших работ!