Структурная схема судового приёмоиндикатора
Известно множество структурных схем судовых приёмоиндикаторов, однако, каждую из них можно условно разделить на аналоговую и цифровую части. В аналоговую составляющую входит приёмное устройство с опорным генератором, в цифровую – вся последующая, наибольшая часть схемы. Усилия разработчиков в последние годы сводятся к стремлению максимально уменьшить аналоговую часть, как наиболее сложно поддающуюся микроминиатюризации. Что касается цифровой части, то сейчас разработаны и серийно выпускаются ЧИПы, позволяющие обеспечивать параллельную обработку до 12 каналов приёма при высокой степени надежности, помехозащищенности и точности измеряемых параметров. Габаритные размеры современных судовых приёмоиндикаторов определяются только размерами дисплея, информация на котором должна быть легко читаема.
На рис. 20 приведена упрощенная структурная схема одного канала приёмоиндикатора GPS, отвечающего вышеперечисленным требованиям.

|
Рис. 20. Схема приёмоиндикатора GPS/ГЛОНАСС
Его аналоговая часть образована приёмником супергетеродинного типа, в качестве гетеродина у которого выступает опорный генератор. Работа такого канала происходит следующим образом.
На основании априорных данных о местоположении судна и данных альманаха в вычислителе рассчитывается частота Доплера, после чего устанавливается соответствующее значение частоты тактового генератора. Под управлением последнего в генераторе ПСП формируется псевдослучайная последовательность, которая подается на один вход анализатора. На другой его вход поступает принятый и преобразованный в приёмнике сигнал спутника. Если фазы принятой и сгенерированной ПСП не совпадают хотя бы на одну элементарную посылку кода Голда (для SPS канала), то включается система поиска ПСП по частоте и времени. При этом через вычислитель дается команда на "сбой" тактового генератора, в результате чего генератор ПСП формирует новую последовательность, смещенную относительно предыдущей на одну посылку.
|
|
|
Сбои тактового генератора будут происходить до тех пор, пока фаза псевдослучайной последовательности на выходе генератора ПСП не совпадет с фазой ПСП принимаемого сигнала. После этого начинает работать система слежения за временным и частотно–фазовым положением ПСП, по результатам измерений квазидальностей и приёма эфемерид в вычислителе определяются координаты судна, время и индицируются на дисплее с тактом 1 с.
Структурная схема приёмоиндикатора ГЛОНАСС может отличаться лишь тем, что на вход приёмника должны подаваться разные частоты, т.к. каждый спутник имеет собственную несущую частоту.
|
|
|
Типы судовых приёмоиндикаторов GPS
Более 60 зарубежных фирм разрабатывают приёмоиндикаторы GPS. Наиболее широко на судах используются приёмоиндикаторы следующих фирм: Furuno, Koden, Si–tex, Raytheon, Northstar, Garmin, Echotec, Magellan. Каждая фирма выпускает несколько типов приборов с различными эксплуатационно-техническими характеристиками. В настоящее время число типов судовых приёмоиндикаторов составляет более 200. ММО подготовлена новая редакция главы 5 Конвенции СОЛАС, согласно которой все суда вместимостью более 150 регистровых тонн будут обязаны иметь приёмоиндикаторы ГЛОНАСС/GPS, причем работающие в дифференциальном режиме.
Типовые приёмоиндикаторы показаны в таблице 9.
Таблица 9
Типы приёмоиндикаторов РНС GPS
| Фирма, модель | Количество каналов | Работа в DGPS | Электронные карты |
| Koden, KGP 931 –'–, KGF 960 Furuno, GP 30 –'– , GP 80 Garmin, GP MAP 130 Magellan,NAV 6500 Raytheon,Raychart Si–tex,NAV–Add 1000G | 12 6 6 8 12 10 12 6 | да –'– –'– –'– –'– –'– –'– –'– | нет –'– –'– –'– есть –'– –'– –'– |
МССС КОСПАС–SARSAT
Данная система используется не только для определения координат потребителей, но и передачи их аварийной информации спасательным службам. (КОСПАС – космическая система поиска и спасания аварийных судов, SARSAT – Search And Rescue Satellite of Aided Tracking). В реализации этого проекта помимо СССР и США приняли участие Канада и Франция.
|
|
|
Система состоит из четырех основных частей:
1. Аварийные радиобуи (АРБ).
2. ИСЗ.
3. Пункты приёма информации (ППИ).
4. Центры управления системой (ЦУС).
АРБ предназначен для передачи информации о бедствии. Он работает на частоте 406.025 МГц, передавая следующие данные:
1. Регистрационные характеристики АРБ (номер, тип).
2. Код страны.
3. Тип судна и его опознаватели (название, позывной, опознаватель МПС).
4. Количество членов экипажа.
5. Судовладелец.
6. Адрес, телефон и телекс судовладельца.
7. Если имеется устройство ввода информации, то возможна передача характера бедствия.
В состав АРБ включён передатчик, работающий на частоте 121.5 МГц, который предназначен для окончательного привода спасательных средств к месту АРБ с помощью УКВ-радиопеленгаторов.
ИСЗ предназначены для приёма, обработки и ретрансляции сигналов АРБ в ППИ. В данной системе используются околополярные спутники, запущенные на орбиту высотой 850–1000 км. Информация, принятая от АРБ, хранится в запоминающем устройстве ИСЗ и сбрасывается в ППИ на частоте 1544.5 МГц. Сброс информации производится по команде ППИ, когда спутник находится в зоне его видимости. В настоящее время на четырех орбитах вращаются спутники типов "Надежда" и "NOAA". В американских ИСЗ предусмотрена ретрансляция сигналов АРБ на геостационарные ИСЗ системы INMARSAT.
|
|
|
ППИ (их около 30) обеспечивает приём, обработку, сортировку сигналов ИСЗ с целью определения координат АРБ. Для этого в ППИ с ЦУС ежесуточно поступают параметры орбитального движения ИСЗ. Обработанная информация по наземным каналам связи направляется в ЦУС.
Основными задачами ЦУС являются координация и управление элементами системы, приём, обработка и обмен аварийной и служебной информацией с ППИ, поисково-спасательными службами и зарубежными ЦУС (всего их 5), планирование работы системы, учет и регистрация АРБ, осуществление контроля над прохождением информации.
РАДИОЛОКАЦИЯ
Общие положения
Радиолокацией называется процесс обнаружения и определения характеристик движения объектов, способных отражать радиоволны сверхвысокочастотного (СВЧ) диапазона. Когда на пути распространения такой волны возникает тело, физические характеристики которого отличны от окружающей среды, то в его поверхностных слоях наводятся токи. Эти токи порождают вторичное электромагнитное поле, которое, распространяясь во всех направлениях, частично возвращается к зондирующей радиолокационной станции (РЛС) и становится источником обнаружения этого объекта.
В настоящее время используются четыре вида радиолокации:
1. Непрерывная радиолокация с активным ответом.
2. Непрерывная радиолокация с пассивным ответом.
3. Импульсная радиолокация с активным ответом.
4. Импульсная радиолокация с пассивным ответом.
Для решения навигационных задач на водном транспорте в основном используются третий и четвёртый виды, причём последний – в подавляющем большинстве случаев. При активном ответе объект (цель) после облучения его зондирующим импульсом сам становится излучателем СВЧ-энергии, т.к. в его состав входит собственный СВЧ-генератор. При пассивном ответе объект является обычным отражателем.
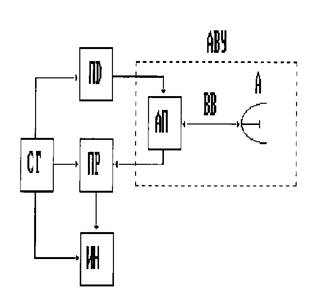
Импульсная РЛС (рис. 21) включает в свой состав следующие элементы:
1. Синхронизирующий генератор (СГ).
2. Передатчик (ПД).
3. Приёмник (ПР).
4. Индикатор (ИН).
5. Антенно-волноводное устройство (АВУ), объединяющее в себе антенный переключатель (АП), волновод (ВВ) и антенну (А).
Общую согласованность работы основных устройств РЛС обеспечивает синхронизирующий генератор. По его команде запускаются передатчик, приёмник и индикатор. Передатчик формирует мощные СВЧ-импульсы, которые направляются антенным переключателем по волноводу в антенну и излучаются в окружающее пространство.
|
Рис. 21. Общее устройство РЛС
Т.к. антенна вращается, то периодически облучается всё окружающее пространство вокруг РЛС. В перерывах между излучениями антенна улавливает отражённые от целей импульсы. По волноводу через антенный переключатель они направляются в приёмник. Запертый на время излучения приёмник открывается, преобразует, усиливает и детектирует отражённый сигнал, после чего посылает его на отображение в индикатор. Индикатор формирует радиально-круговую развёртку луча в такт с вращением антенны с целью создания изображения окружающего пространства в определённом масштабе (этот масштаб принято называть шкалой дальности). Кроме этого в его задачу входит построение вспомогательных меток (подвижные и неподвижные кольца дальности, электронные визиры направления, курсовая линия, индексные линии, марки и пр.), облегчающих решение той или иной навигационной задачи.
По времени запаздывания отражённых импульсов можно судить о дальности до цели, т.к. скорость распространения электромагнитной волны в окружающей среде известна. Кроме этого антенна РЛС имеет очень узкую диаграмму направленности в горизонтальной плоскости, что позволяет точно определить угловое положение цели относительно зондирующей РЛС. Таким образом, импульсная РЛС определяет положение целей в полярной системе координат – по пеленгу и дистанции.
Отражающие свойства объектов
Отражение радиоволн от целей по своему характеру может быть зеркальным или рассеянным (диффузным). Зеркальное отражение возникает при гладкой отражающей поверхности, когда размеры объекта и радиусы кривизны участков его поверхности во много раз больше длины волны облучающего поля. В этом случае отражение происходит по законам близким к оптическим (угол падения равен углу отражения; луч падающий, луч отраженный и перпендикуляр, восстановленный в точке падения лежат в одной плоскости). Поэтому за исключением случая нормального падения отраженная волна не возвращается к РЛС.
Рассеянное отражение вызывает шероховатая поверхность цели, когда радиусы кривизны её участков соизмерима с длиной волны облучения. В этом случае из–за различного расположения элементов отражающей поверхности относительно фронта падающей волны электромагнитная энергия отражается в различных направлениях.
Отражающие свойства объекта кроме характера отражения зависят от его материала, размеров, формы, ракурса (направления прихода волны облучения) и параметров электромагнитного поля облучения. Количественно отражающие свойства цели оцениваются ЭПО – эффективной поверхностью отражения. ЭПО – это некоторая условная эквивалентная площадь, которая, будучи помещённой в точку нахождения объекта перпендикулярно направлению распространения волны, создаёт на входе антенны РЛС плотность мощности отражённого сигнала равную плотности мощности, отражённой от реального объекта.
Определим аналитическую зависимость для ЭПО.
Пусть на объект воздействует электромагнитное поле. Тогда при отсутствии потерь в объекте он будет переизлучать в окружающее пространство мощность:
| P=Srп, | (70) |
где S–площадь объекта;
rп–плотность мощности падающего потока.
Часть этой мощности, достигая РЛС, создает у её антенны плотность мощности отраженного потока:
| PGo rпSGo ro= ¾¾ = ¾¾¾ , 4pD2 4pD2 | (71) |
где Go–коэффициент направленности излучения объекта в сторону РЛС;
D–расстояние от РЛС до объекта;
В выражении (71):
| SGo=Sэ | (72) |
является эффективной поверхностью отражения, т.е.:
| ro Sэ = 4pD2 ¾ rп | (73) |
Аналитически ЭПО может быть выражена только для предметов простой формы. При этом предполагается, что они выполнены из однородного идеально проводящего материала, т.е. не имеют потерь. Приведём примеры аналитических зависимостей для некоторых из них.
Шар:
| Sэ=pR2, | (74) |
где R–радиус шара.
Пластина:
| Sэ=4p S2/l2, | (75) |
где S–площадь пластины;
l–длина волны облучения.
Уголковый отражатель:
| Sэ=4p a4/3l2, | (76) |
где a–длина стороны треугольной пластины уголкового отражателя.
ЭПО объектов сложной формы (суда, знаки навигационной обстановки) определяются эмпирически. Так для судов существует формула:
Sэ = 52 f0.5 W1.5,
где f–частота поля облучения, МГц;
W–водоизмещение судна, тыс. тонн.
Дата добавления: 2020-04-08; просмотров: 249; Мы поможем в написании вашей работы! |

Мы поможем в написании ваших работ!