Судовые приёмоиндикаторы РНС Лоран-с
Приёмоиндикаторы по степени автоматизации процессов измерений подразделяют на 3 группы: неавтоматизированные, с визуальным поиском сигналов и производством измерений вручную; полуавтоматические, в которых поиск и начальное совмещение сигналов выполняется вручную, а дальнейшее слежение автоматическое; автоматические, в которых все процессы поиска, совмещения и слежения автоматизированы.
Принцип действия полуавтоматического приёмоиндикатора (КПИ–5Ф)
Приёмное устройство принимает и усиливает сигналы станций, после чего они попадают в индикатор. В индикаторе осуществляются импульсные и фазовые измерения, причём перед точными фазовыми измерениями, выполняющимися автоматически, необходимы импульсные измерения для разрешения многозначности. Последние проводятся полуавтоматически в следующем порядке.
Устанавливается частота повторения развертки, равная частоте повторения периодов импульсов принимаемой пары станций. В результате сигналы выбранных станций становятся неподвижными относительно развёртки. Специальные измерительные импульсы совмещаются с сигналами станций выбранной пары. Для этого, кратковременно изменяя частоту развёртки, перемещают сигналы станций до совмещения сигнала ведущей с неподвижным измерительным импульсом. Затем, передвигая подвижный измерительный импульс, совмещают его с сигналом ведомой станции.
|
|
|
После выполнения этих операций временная задержка между измерительными импульсами, отображающаяся на табло, будет равна разности времени прихода сигналов ведущей и ведомой станций. Затем включается фазовая система автоматического слежения, поддерживающая совмещение измерительных импульсов с импульсами береговых станций и осуществляющая автоматическое выполнение фазовых измерений.
Типы судовых приёмоиндикаторов
Все устаревшие модели приёмоиндикаторов обеспечивают только выдачу гиперболических координат, современные преобразуют их в геодезические и, кроме этого, производят решения ряда дополнительных навигационных задач.
Типовые приемоиндикаторы приведены в таблице 7.
Таблица 7
Типы приёмоиндикаторов РНС Лоран–с
| Модель | Фирма, страна | Вид |
| КПИ–5Ф | Россия | Полуавтоматический |
| Балтика | –"– | Автоматический |
| LRX 22 P | MLR electronique, Влкбр | –"– |
| DXL 6500 | Apelco,США | –"– |
| Loran 2550 A | Data marine int.,США | –"– |
| Loran–C 604 L | Kelvin Hughes, Великбр. | –"– |
| Skipper taiyo TL 888 | Skipper electronics, Норв. | –"– |
| Vigil RX | Vigil RX Navigator, Фран | –"– |
| LR–770,771,791 | Koden, Япония | –"– |
| LP–1000 | Furuno, Япония | –"– |
Принцип действия спутниковой РНС
|
|
|
Спутниковой называют РНС, в которой роль навигационных ориентиров выполняют искусственные спутники Земли (ИСЗ), снабжённые специальной бортовой навигационной аппаратурой. В состав системы входят навигационные спутники, судовая навигационная аппаратура и система наземного обеспечения, включающая космодром, командно–измерительный комплекс и центр управления. Космодром обеспечивает выполнение всех операций по подготовке навигационных спутников и выводу их на орбиту. Командно-измерительный комплекс с помощью системы телеметрии контролирует состояние спутников, управляет их работой, определяет параметры движения и снабжает всей информацией, необходимой для функционирования в качестве средства радионавигации. Центр координирует и управляет деятельностью всей системы в целом.
Для того, чтобы по навигационному спутнику можно было определиться, надо с высокой степенью точности знать место спутника на момент обсервации. Решить эту задачу можно разными способами. Например, зная параметры движения спутника, можно на судне при помощи судовой ЭВМ вычислять место спутника на заданный момент. Однако этот путь наталкивается на серьезные препятствия: так как учёт ряда факторов, воздействующих на спутник, весьма сложен, то на судне необходимо иметь ЭВМ с широкими возможностями. Второй путь – решение задачи предвычисления координат спутника на самом спутнике – требует наличия на нём сложного вычислительного комплекса.
|
|
|
Поэтому в настоящее время задачу предвычисления координат и параметров движения спутника решает обеспечивающий наземный комплекс. Это производится с определённой частотой, вся информация передаётся на спутник, где хранится в его запоминающем устройстве до очередного обновления. С установленной дискретностью эта информация транслируется спутником для её использования потребителями. Таким образом, сам спутник передаёт информацию о своих координатах и, кроме того, излучает сигнал, позволяющий определить радионавигационный параметр.
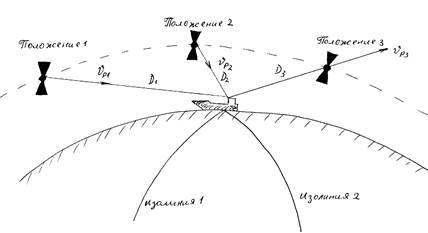
Знание места спутника и величины радионавигационного параметра позволяет определить поверхность положения, на которой находится судно. Несколько таких измерений в разные моменты времени по одному спутнику или одновременно по разным позволяют определить несколько поверхностей положения и в итоге – место судна (рис. 18). В зависимости от вида системы могут измеряться различные радионавигационные параметры. В системах первого поколения (Транзит, Цикада) измеряется доплеровская частота, в системах второго поколения (GPS, ГЛОНАСС) для нахождения координат объекта производятся дальномерные измерения, а для решения некоторых дополнительных задач – доплеровские. Следует также отметить, что большой объем обрабатываемой информации в судовом приёмоиндикаторе, сложность вычислительных моделей требуют обязательного наличия в составе судовой аппаратуры ЭВМ.
|
|
|
|
Рис. 18. Принцип работы спутниковой РНС
Итак, при работе спутниковой РНС происходят следующие основные процессы: наземный комплекс обеспечивает спутник периодически обновляющейся информацией о его координатах, спутник с определённой частотой передает эту информацию и навигационный сигнал, судовая аппаратура принимает информацию о месте спутника, одним из способов измеряет радионавигационные параметры и вычисляет место судна.
Орбиты ИСЗ
Орбита спутника в значительной степени определяет как возможности, так и методы его навигационного использования. При движении спутника по круговой орбите его линейная скорость равна:
| _____ V=7.91/√1+h/R , | (59) |
где h–высота ИСЗ;
R–радиус Земли.
Конкретная величина скорости и время его обращения зависят от высоты спутника. В общем случае спутник двигается по эллиптической орбите, один из фокусов которой совпадает с центром масс Земли. Характеристики ИСЗ и орбиты могут быть определены шестью кеплеровскими элементами, пять из которых характеризуют положение орбиты, а шестой – положение и направление движения ИСЗ.
Орбиты в зависимости от наклонения к плоскости экватора подразделяются на экваториальные, полярные и наклонные. По высоте их делят на низкие (до 5000 км), средние (5000–20000 км) и высокие (более 20000 км).
Выбор высоты орбиты зависит от метода навигационного использования. Так в системах первого поколения, использующих доплеровские измерения, применяются низкоорбитальные спутники. Обусловлено это тем, что для яркого проявления эффекта Доплера необходима большая скорость сближения (удаления) спутника и потребителя. А это достигается только на малых высотах. Однако на системы с низкими орбитами значительно влияют аномалии гравитационного поля Земли и сопротивление атмосферы. Поэтому в системах второго поколения уже используются среднеорбитальные спутники (высота около 20000 км). Но увеличение высоты повело за собой и изменение метода измерения. В этих системах используется дальномерный способ.
Дата добавления: 2020-04-08; просмотров: 241; Мы поможем в написании вашей работы! |

Мы поможем в написании ваших работ!