Принцип действия судового приёмоиндикатора
Хотя для навигационных целей в данной РНС могут использоваться две несущие частоты (150 и 400 МГц), в подавляющем большинстве случаев в приёмоиндикаторах, предназначенных для торгового флота, применяются одноканальные приёмники, работающие на частоте 400 МГц.
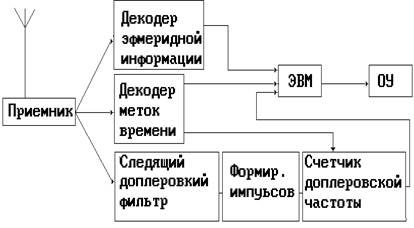
Обобщенная структурная схема одноканального судового приёмоиндикатора показана на рис. 19.
Первоначальную обработку (усиление и преобразование) сигнал спутника проходит в приёмнике супергетеродинного типа с двухступенчатым преобразованием частоты. После обработки из него необходимо выделить следующую полезную информацию: сообщения об альманахе и эфемеридах, что необходимо для расчёта координат спутника; метки времени и синхроимпульсы для управления счётчиком доплеровских частот; собственно доплеровскую частоту, интегрирование которой по времени позволит определить навигационный параметр (разность расстояний до спутника в различные моменты его положения на орбите). Эта информация выделяется в декодерах эфемеридной информации, меток времени и следящем доплеровском фильтре соответственно.
|
Рис. 19. Схема приёмоиндикатора доплеровской спутниковой РНС
Причём декодеры преобразуют её непосредственно в импульсы, а фильтр выдаёт аналоговый сигнал, который преобразуется в импульсный в соответствующем формирователе импульсов.
Управление работой приёмоиндикатора, расчёты по заложенным алгоритмам, обмен данными с периферийными устройствами осуществляется через ЭВМ. Перед началом работы в память ЭВМ необходимо ввести счислимое место, высоту антенны над уровнем моря, а также дату и время.
Типы судовых приёмоиндикаторов
Судовые приёмоиндикаторы кроме определения геодезических координат и времени обеспечивают вождение судна по локсодромии или ортодромии в точку с заданными координатами, вычисление пройденного расстояния, расчет суммарного сноса и т.д.
Типовые приёмоиндикаторы показаны в табл. 8.
Таблица 8
Типы приёмоиндикаторов РНС Транзит
| Модель | Фирма, страна |
| FSN–70 MX–1102 MX–1142 MX–4102 MX–1107 RS 5000 DS SIMRAD NX | Furuno,Япония Мagnavox, США –"– –"– –"– Delta Marine Ltd, Великобритания Норвегия |
РНС ГЛОНАСС и GPS
Состав систем
Спутниковые РНС ГЛОНАСС (ГЛОбальная НАвигационная Спутниковая Система) и GPS – Global Position System – глобальная система местоопределения (другое её название NAVSTAR – Navigation Satellite Time and Ranging – спутники для измерения времени и дистанции) относятся к системам, использующим в основном псевдодальномерный способ определения, а для решения дополнительных задач (определение скорости) – доплеровский.
Они являются РНС второго поколения взамен системам типа Транзит и Цикада, которые обладают рядом недостатков: большой дискретностью в определениях и их недостаточной точностью при решении ряда навигационных задач; невозможностью определения, если судно находится в плоскости орбиты ИСЗ; слабой помехозащищенностью сигналов.
Разработка ГЛОНАСС начата в СССР в 1970 году, однако она полностью ещё не развёрнута. Сеть должна состоять из 24 навигационных спутников (3 из которых – запасные), по 8 спутников на трёх орбитах. Высота круговых орбит 18840–19940 км, угол наклона – около 65°, их плоскости разнесены по долготе на 120°. На орбитах спутники размещены равномерно, угол между соседними составляет 45°. Время обращения спутников вокруг Земли 11 час. 16 мин.
Разработка GPS начата в США в 1973 г. и к 1995 г. она была полностью введена в эксплуатацию. В настоящее время в ее состав входит 24 основных и несколько дополнительных ИСЗ, расположенных на 6 наклонных круговых орбитах высотой 20200 км. Орбиты равномерно разнесены по долготе. Углы наклонения плоскостей орбит относительно экватора составляют 55°. В каждой из 6 орбитальных плоскостей спутники расположены равномерно. Время обращения спутников вокруг Земли 12 час.
Подобный выбор параметров орбит этих систем позволяет обеспечить в любой точке Земли приём радиосигналов не менее четырёх спутников и тем самым решить задачу непрерывного глобального навигационного обеспечения пользователей. Кроме того, период обращения ИСЗ подобран таким, что каждый спутник проходит над одной и той же точкой земной поверхности раз в сутки. Благодаря этому отпала принципиальная необходимость разворачивания глобальной сети станций слежения.
Частотный диапазон
Несущие частоты сигналов ГЛОНАСС расположены в двух полосах частот: первая – в пределах от 1602.5625 МГц до 1615.5 МГц с величиной шага 0.5625 МГц и вторая – от 1246.4375 МГц до 1256.5 МГц с шагом 0.4375 МГц. Каждый спутник работает на двух собственных несущих частотах. Все частоты, излучаемые каждым спутником когерентны, и формируются от высокостабильного атомного стандарта частоты, что обеспечивает одновременное излучение сигналов спутниками.
Каждый спутник GPS излучает сигналы на двух несущих частотах: L1=1575.42 МГц и L2=1227.60 МГц (L–начальная буква слова LINK–мера длины около 20 см).
Формат сигналов
В ГЛОНАСС и GPS для передачи навигационной и специальной информации используются шумоподобные сигналы. Они отличаются малой величиной пиковой излучаемой мощности, высокой скрытностью и помехозащищенностью.
В ГЛОНАСС для передачи точной навигационной информации обе несущие частоты манипулируются по фазе псевдослучайной двоичной последовательностью (ПСП) с тактовой частотой 5.11 МГц (точный канал), для передачи грубой навигационной информации по фазе манипулируется только вторая несущая частота, причем другим видом ПСП с тактовой частотой 0.511 МГц (грубый канал). ПСП, которые использует ГЛОНАСС, получили название последовательностей максимальной длины (МД). Точный канал является закрытым и предназначен для использования в военных целях. Использование двух частот в нём, помимо прочего, позволяет устранить ионосферные погрешности.
В GPS в качестве ПСП используются так называемые М–последовательности. При этом на каждом спутнике также формируется два кодированных сигнала: PPS – Precision Position Sign – сигнал точного положения; SPS – Standart Position Sign – сигнал стандартного (грубого) положения.
PPS защищен от несанкционированного доступа сторонними потребителями и позволяет производить навигационные измерения высокой точности. Он имеет тактовую частоту 10.23 МГц и период используемой кодовой последовательности 267 сут. Поэтому, не зная установленного начального состояния этого кода, раскрыть его, а значит, и воспользоваться им для навигационных целей практически невозможно. Каждому спутнику выделяется свой индивидуальный семисуточный интервал этой последовательности, что позволяет однозначно идентифицировать его сигнал в судовом ПИ среди прочих спутников. В конце каждой недели начальное состояние кода на каждом спутнике изменяется по команде наземного комплекса управления. В соответствии с кодом PPS производится манипуляция фазы колебаний обеих частот L1 и L2. Для использования этого сигнала потребители должны предварительно засинхронизировать с высокой точностью свой эталон времени с единым временем GPS, а счислимое место указать с точностью не хуже 2–3 миль.
SPS открыт для использования всеми потребителями навигационной информации, и по своей структуре он является кодом Голда. SPS также устанавливается индивидуально для каждого спутника, но в отличие от PPS имеет существенно более короткий период равный 1 мс при тактовой частоте 1.023 МГц. В силу этого псевдодальномерные измерения с его использованием не вызывают затруднений даже при существенных расхождениях счислимого и действительного места объекта, а также его эталона времени и времени системы. Кроме того, кодом SPS каждые 30 с передается ключевое слово HOW, указывающее текущее состояние PPS кода. Поэтому в бортовых ПИ, имеющих дешифратор этого слова (допущенных к использованию навигационной информации повышенной точности), можно осуществить достаточно быстрое вхождение в код PPS. Фазовая манипуляция в соответствии с кодом SPS осуществляется только на одной несущей частоте L1.
Защищенный код обеспечивает точность определения места не хуже 10 м, стандартный – в пределах 100–300 м.
Специальная информация в ГЛОНАСС кодируется методом относительной фазовой телеграфии (ОФТ) со скоростью передачи 50 Бод (1 Бод = 1 двоичному знаку/сек). В GPS для этого по фазе манипулируется SPS код на частоте L1, при этом скорость передачи та же.
Специальная информация делится на оперативную и неоперативную. В ГЛОНАСС оперативная информация передается каждым спутником и содержит следующие данные: метки времени; текущее время (год, месяц и дата не передаются); сдвиг шкалы времени спутника относительно шкалы времени системы; сдвиг шкалы времени системы относительного государственного эталона времени и частоты; эфемериды спутника. Оперативная информация передается каждые 30 с и меняется каждые 30 мин.
Неоперативная информация (альманах) также передается каждым спутником и содержит данные обо всех спутниках системы: дата закладки альманаха; номера рабочих спутников и их частоты; параметры положения спутников на орбитах; пригодность спутников для навигационных измерений. Неоперативная информация передается каждые 2.5 мин.
В GPS специальная информация передается субкадрами продолжительностью по 6 с, 5 субкадров образуют кадр продолжительностью 30 с, и, наконец, 25 субкадров образуют суперкадр продолжительностью 12.5 мин. В первом субкадре передаются частотно–временные поправки, ключевое слово для синхронизации по PPS коду, во втором и третьем субкадрах – эфемериды, в оставшихся двух субкадрах – системные данные: состояние ионосферы, готовность спутника к работе, год, месяц, дата, 1/25 часть альманаха. Таким образом, оперативная информация передается циклом 30 с, неоперативная (альманах) – циклом 12.5 мин.
Геометрические факторы
В ГЛОНАСС и GPS введено понятие нескольких видов геометрических факторов. Геометрический фактор представляет собой относительную (безразмерную) величину, которая показывает во сколько раз среднеквадратическая ошибка позиционирования или определения скорости объекта превосходит среднеквадратическую ошибку измерений дальности и скорости изменения дальности.
В свою очередь, суммарную погрешность измерений определяют три следующих вида погрешностей: погрешности, связанные с источниками излучения – погрешности эфемерид, временные и частотные погрешности радионавигационных сигналов;
погрешности на условия распространения радиоволн – ионосферные и тропосферные погрешности, влияющие на задержку сигналов и изменение их несущей частоты, а также погрешности многолучёвости, возникающие вследствие отражения сигналов от палубных устройств и морской поверхности;
шумовые и инструментальные погрешности измерений радионавигационных параметров – временных интервалов и доплеровской частоты в судовых приёмоиндикаторах.
Среди ряда геометрических факторов следует выделить основные:
ГФП – геометрический фактор определения координат места на плоскости. В GPS ему соответствует HDOP – Horisontal Delution Of Precision – горизонтальная потеря точности;
ГФПр – геометрический фактор определения координат места в пространстве. В GPS ему соответствует PDOP – Position Delution Of Precision – позиционная потеря точности.
Величины геометрических факторов зависят только от взаимного расположения потребителя навигационной информации и видимых спутников. Оптимальным (обеспечивающим минимальное значение геометрических факторов) считается такое созвездие спутников, в котором относительно объекта они равномерно разнесены по горизонту (как минимум три спутника с азимутом 120°), а один спутник находится в зените. Современные приёмоиндикаторы постоянно оптимизируют созвездие используемых спутников по геометрическому фактору, и в реальных условиях это значение редко превышает 5. Число это по желанию оператора может быть индицировано и, таким образом, для него будет существовать возможность постоянного контроля ошибки позиционирования и скорости, если известно, что суммарная погрешность измерения дальности (по грубому каналу) равна 10.7 м и 25.3 м, а скорости – 20.6 см/с и 36.4 см/с соответственно для ГЛОНАСС и GPS. В GPS эти величины больше потому, что в грубый канал дополнительно ПРЕДНАМЕРЕННО вводится случайная погрешность, устранить которую возможно только при знании специального кода доступа (Y–код).
Дата добавления: 2020-04-08; просмотров: 244; Мы поможем в написании вашей работы! |

Мы поможем в написании ваших работ!