Высокоскоростной железнодорожный транспорт

| Рис. 13.91. Первый опытный японский поезд GCT на испытаниях в Центре транспортных технологий в Пуэбло, штат Колорадо, США. 2000 г. |

| Рис. 13.92. Поезд GCT: тележка типа «А» (вид снизу). Япония. 2008 г. |
ных, электротехнических и других компаний образовали консорциум «Gauge Change Train» — GCT («Поезд изменяемой колеи»).
Первый опытный поезд GCT, состоящий из трех моторных вагонов (двух концевых и одного промежуточного), был изготовлен в октябре 1998 г. Он имеет габарит обычных вагонов для узкоколейных железных дорог Японии. В 1999—2001 гг. поезд прошел испытания в США на полигоне в г. Пуэбло (рис. 13.91), во время которых развил максимальную скорость 246 км/ч. Во время опытных поездок был осуществлен пробег более 600 тыс. км, поезд свыше 2 тыс. раз совершил переход через стационарное устройство с одной колеи на другую. Затем до 2006 г. поезд испытывался в Японии на узкоколейных железных дорогах и на ВСМ.
Вагоны поезда оснащены двумя типами тележек: так называемый тип «А» с прямым приводом от синхронного двигателя и тип «В» — с асинхронным двигателем и редуктором. В тележках типа «А» внешний ротор синхронного тягового двигателя с возбуждением от постоянных магнитов непосредственно прикреплен к колесу колесной пары, образуя колесно-моторный блок (рис. 13.92, 13.93), а статор, находящийся внутри ротора, насажен на неподвижную
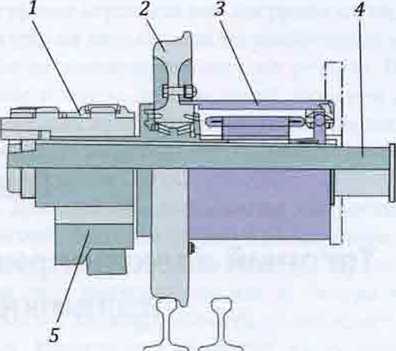
Рис. 13.93. Колесно-моторный блок тележки типа «А» (показано одно колесо): 1 — буксовые подшипники; 2 — колесо; 3 — внешний ротор тягового двигателя, 4 — неподвижная ось колесной пары; 5 — стопорный механизм, фиксирующий положение колеса на оси
|
|
|
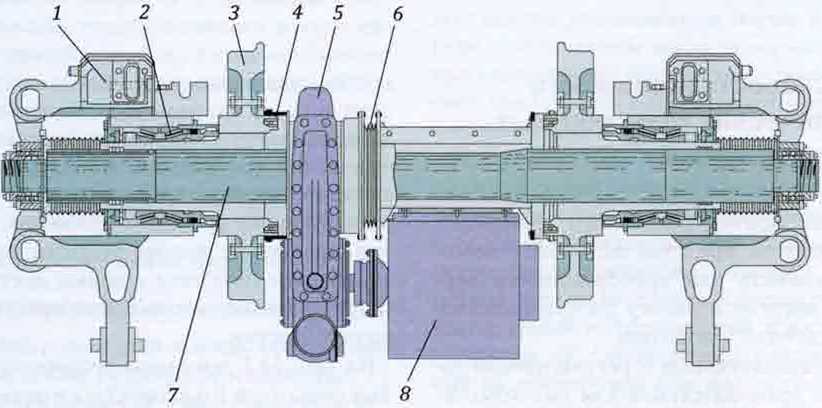
| Рис. 13.94. Колесная пара тележки типа «В» (вид сверху): 1 — стопорный механизм фиксации положения колеса на оси; 2 — буксовый подшипник; 3 — колесо; 4 — подвижная муфта и карданный вал передачи вращающего момента от редуктора к оси; 5 — редуктор; 6 — защитный кожух в виде резиновой гармошки; 7 — ось колесной пары; 8 — тяговый двигатель |
ось колесной пары. На нее с помощью конических подшипников также насажены и колеса (рис. 13.93).
Переход тележки с колеи одной ширины на колею другой ширины осуществляется с помощь устройства, в котором, как в системах Talgo или CAF, происходит разгрузка колесной пары, деблокируются колеса на оси, переводятся в новое положение и блокируются в этом положении.
В тележках типа «В» (рис. 13.94) крутящий момент от асинхронного двигателя, подвешенного на раме тележки, передается на ось через муфту и карданный вал. Колеса насажены на ось, имеющую длинные промежуточные шлицевые втулки, и вращаются вместе с ней. Колесные пары напоминают обычные, но имеют возможность двигаться по шлицам оси и фиксируются в положении, соответствующем ширине той или иной колеи. Переход с колеи одной ширины на колею другой осуществляется по такому же устройству, как и для тележки типа «А».
|
|
|
В 2006 г. в Японии был изготовлен и передан на испытания второй опытный поезд такой же конфигурации, как и первый, но с промежуточным вагоном, имеющим устройство для наклона кузова. В 2009 г. на одной из ВСМ поезд развил скорость 270 км/ч. Испытания поезда с новыми тележками облегченной конструкции продолжаются.
Глава 14
Тяговый электропривод высокоскоростного
подвижного состава
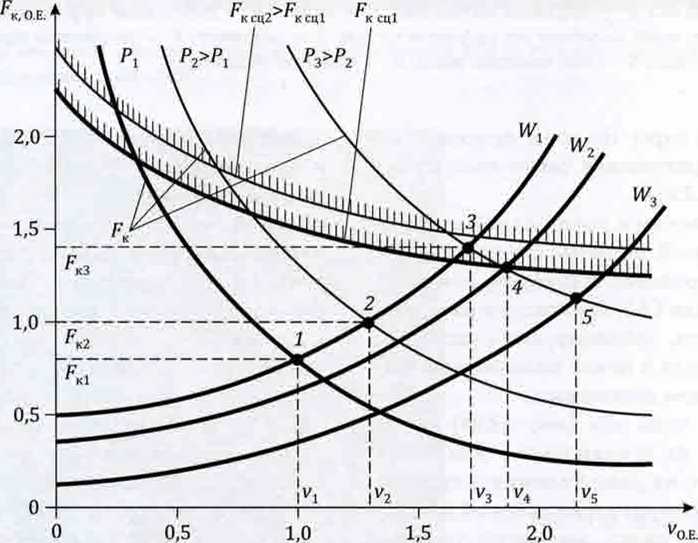
| Рис. 14.1. Графическое отображение условий реализации повышенной скорости движения |
14.1. Скорость и мощность электрических транспортных средств
Тяговый привод рельсового транспортного средства представляет собой комплекс устройств для преобразования первичной энергии в работу по преодолению сопротивления движению.
Преобразовательные и регулирующие устройства привода служат для видоизменения электрической энергии, получаемой тяговым подвижным составом из контактной сети или от автономного первичного источника энергии. Преобразованный электрический ток должен отвечать принятому типу тягового электродвигателя, соответствующему уровню напряжения, частоте и направлению потока энергии, заданной скорости и силе тяги с целью достижения рациональных тяговых и энергетических характеристик.
|
|
|
На рис. 14.1 показаны графические кривые силы тяги Fи скорости vв относительных значениях. С повышением скорости
движения тягового подвижного состава сила сцепления FKсц колеса с рельсом уменьшается. Если при низкой скорости v коэффициент сцепления ц/сц = 0,3—0,35, то при v = 200—250 км/ч его значение снижается до 0,15 и менее. Сила сопротивления движению И/, зависящая от основного удельного сопротивления iv0и массы поезда тц увеличивается пропорционально степенной зависимости от скорости vвследствие увеличения аэродинамического сопротивления, а сила тяги FKпри заданной мощности Р тяговых двигателей уменьшается обратно пропорционально скорости v.Уравнение движения поезда, представленного в виде сосредоточенной массы тп, в соответствии со вторым законом Ньютона имеет вид:
где — — ускорение (замедление) движения dt
поезда.
Из этого соотношения следует, что в ре-
жиме установившейся скорости — = 0 dt
|
|
|
FK= W.Например, для поезда, оснащенного двигателями суммарной мощностью Р} и имеющего сопротивление движению Wv режим равновесного состояния для скорости Vj будет соответствовать точке 1 (см. рис. 14.1).
Рассмотрим увеличение скорости до значения v2для поезда той же массы. Это возможно за счет соответствующего повышения силы тяги до Ек2 в точке 2, что достигается увеличением мощности, реализуемой тяговыми двигателями, до Р2. Дальнейшее повышение скорости до v3при сопротивлении IVj можно обеспечить при мощности Р3. Однако равновесного состояния в точке 3 может и не наступить из-за ограничения по силе сцепления FKсц1 движущих колес с рельсами. Обеспечение необходимой силы тяги Fk3(в точке 3) возможно при условии, если масса поезда, приходящаяся на моторные (движущие) оси т3, будет увеличена. Это может быть достигнуто за счет увеличения доли моторных осей (например, переход от локомотивного варианта поезда к моторвагонному варианту) при ограничении нагрузки от колесной пары на рельсы или же увеличении нагрузки от движущих колес на рельсы. Последнее условие при высокой скорости движения, как правило, является неприемлемым из-за отрицательного динамического воздействия на путь.
Дальнейшее повышение скорости до v4 может быть получено при снижении силы сопротивления движению до IV2(точка 4} за счет уменьшения массы поезда и улучшения ходовых качеств подвижного состава. Увеличение скорости до v5(точка 5) при сохранении мощности Р3 может быть достигнуто уменьшением массы поезда и (или) увеличением числа моторных осей, а при повышенной мощности против Р3 — за счет увеличения массы, приходящейся на моторные оси.
Таким образом, максимальная скорость на линии скоростного (высокоскоростного) движения непосредственно увязывается с основными техническими параметрами скоростного подвижного состава: общей массой поезда, мощностью тяговых двигателей; долей моторных осей и их распределением по длине поезда (сосредоточение на локомотиве или распределение по моторным вагонам, т.е. сосредоточенный (централизованный) или распределенный тип тягового обеспечения); вместимостью вагонов; сопротивлением движению поезда, в том числе связанным и с аэродинамическими характеристиками, которые были подробно рассмотрены в п. 13.1. Особенно важен их учет для высокоскоростного подвижного состава, поскольку, как известно, сопротивление воздуха движущемуся телу возрастает пропорционально квадрату скорости. Так, если при скорости 100 км/ч оно составляет около 35 % общего сопротивления движению, то при скорости 200 км/ч— уже около 70 %, а при 300 км/ч — свыше 90 %.
Учитывая все вышеизложенное номинальную силу тяги Екн выбирают, исходя из проведенных расчетов, с некоторым запасом по сцеплению (например, точка 2 на рис. 14.1); при заданной силе тяги FKH= Fk2 тяговая мощность Ртн двигателя (на ободе колеса) определяется заданной расчетной
Дата добавления: 2019-11-16; просмотров: 511; Мы поможем в написании вашей работы! |

Мы поможем в написании ваших работ!