Инструментальный и аппаратный массаж
Инструменты массажиста
Еремушкин М.А
Рука, безусловно, является основным средством (инструментом) в работе профессионального массажиста. Однако зачастую оказывается чрезвычайно затруднительно или утомительно для самого массажиста использование мануальных (ручных) способов массажа. В таких ситуациях на помощь массажисту приходят инструментальные виды массажа. Широко использующиеся в практике различные массажные приспособления (массажеры) позволяют значительно улучшить лечебную помощь больным и увеличить производительность труда специалистов по массажу.
Классифицируют инструментальные виды массажа по следующим критериям:
1) применяются профессионально – массажистом или в быту, в качестве пособия для самомассажа;
2) оказывают механическое (деформирующее) или вибрационное воздействие;
3) имеют механический или электропривод;
4) цельные или сборные конструкции;
5) используют действие жестких (плотных) искусственных или природных материалов (камни, веники и др.), водную среду (гидромассаж) или смену воздушного давления (баро‑, пневмомассаж);
6) восполняют арсенал приемов поглаживания, растирания, разминания, вибрации или комбинируют воздействие;
7) применимы для общего или локального массажа или для конкретной части тела, анатомической структуры (для кожи, мышц, соединительной ткани, надкостницы и т. п.) или полости (ротовая полость и т. п.) и др.
|
|
|
Возможно сочетание в одном приспособлении разных характеристик, соответственно с чем и будет определяться назначение массажера.
Если тенденция развития аппаратных массажных устройств идет в сторону бытового их применения, то массажеры все больше и больше входят в повседневный арсенал рабочих инструментов профессиональных массажистов.
Как правило, группы механических инструментов для массажа активно применяются в рефлексотерапевтической практике. Для врача‑рефлексотерапевта или медицинской сестры рефлексотерапевтического кабинета это повседневная рутинная работа. Однако следует помнить, что к массажному воздействию относятся только методы поверхностной рефлексотерапии, к тому же без проникновения (травматизации) через кожные покровы.
Наиболее широко сегодня представлены механические массажеры из плотных искусственных или природных материалов.
Известно, что умеренная болезненность при надавливании на надкостницу у клинически здоровых лиц возникает при воздействии на нее с силой (9,25±0,17) кг/см2. В зонах автономной иннервации ирритированных задних корешков при спондилогенных заболеваниях периферической нервной системы ощущение боли у пациентов появляется при надавливании с силой (1,49±0,12) кг/см2. Сила давления (6±0,66) кг/см2 вызывает боль в пальце массажиста, которым осуществляется пальпация. Эти данные показывают, что периостальный метамерный массаж проводить руками физически довольно трудно, так как сила воздействия при массаже должна составлять от 1 до 15 кг/см2. Поэтому возникает необходимость в применении специальных массажеров (Исаев).
|
|
|
Как правило, к массажерам предъявляются следующие требования: массажер не должен травмировать ткани и в то же время должен быть умеренно упругим; плотность массажера должна незначительно превосходить плотность кожи человека; теплопроводность массажера должна быть незначительной.
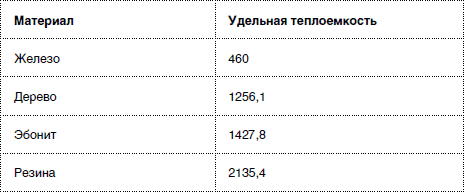
С учетом указанных требований считается, что наиболее приемлемыми для изготовления массажеров являются: по плотности – дерево, эбонит, янтарь, в меньшей степени – кость; по коэффициенту теплопроводности – дерево, эбонит, резина (табл. 11, 12).
Таблица 11. Плотность материала для изготовления массажеров (по Ю.Г. Гофману, 1977)
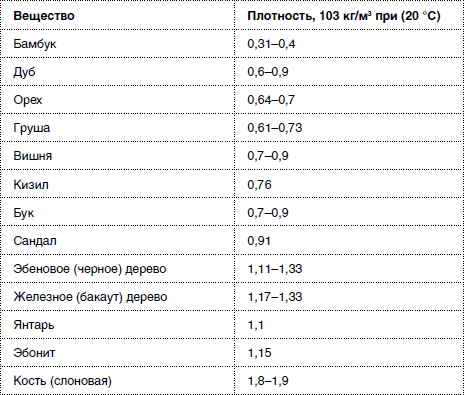
Таблица 12. Удельная теплоемкость материала для изготовления массажера (при 298, 15 К и 1,013–105 Па, Дж/кг К)
Форма, внешний вид массажеров, конечно, могут быть самыми разнообразными (валики, ролики, веники и т. п.), но суть их, как и столетия назад, остается прежней – попытка заменить или дополнить возможности рук профессионального массажиста.
|
|
|
Роботные системы для массажа
Еремушкин М.А., Головин В.Ф
Использование приемов мануальной техники массажа является важной составной частью процесса восстановительного лечения, что связано с высокой терапевтической эффективностью данных манипуляций.
Однако сама по себе массажная процедура – чрезвычайно трудоемкое и утомительное для оператора (массажиста) занятие и требует от него не только значительного физического, но и психического напряжения. Именно по этой причине попытки заменить руку манипулятора каким‑либо инструментом или аппаратом стали предприниматься с тех пор, как массаж оформился в один из самых необходимых, доступных и часто применяемых способов лечения широкого спектра заболеваний.
Еще отец русской школы современного классического массажа И.З. Заблудовский в конце XIX века указывал на перспективность использования технических средств в процессе массажного воздействия: «Нельзя ли воспользоваться новейшими усовершенствованиями механики для устройства таких машин, которые заменили бы действие рук, или не будет ли даже действие машин предпочтительнее действия рук? Стоило бы только изобрести такую машину, силу которой можно было бы в каждый данный момент определять в цифрах и, таким образом, вместо неопределенной работы массера, зависящей от субъективного мышечного чувства, иметь дело с работой, выраженной в цифрах; другими словами, вместо того, чтобы количество целебного средства взять на глазомер, – взвешивать его на точных весах».
|
|
|
Однако за всю долгую историю массажа ни одно из предложенных массажных устройств так и не смогло полностью заменить действие рук массажиста.
С середины ХХ века, благодаря развитию таких научных дисциплин, как бионика и биокибернетика, моделирование живых систем, на основе высокотехнологических процессов и компьютерных технологий широким фронтом начало входить в медицинскую практику. Данный процесс ознаменовался созданием первых медицинских роботов и роботных систем. По архитектуре конструкций они стали делиться на антропоморфные , напоминающие по форме человеческое тело или его части, и техногенные , отдающие приоритет подобию функциональных возможностей человека, а не структуре. Клиническое использование роботов связалось с тремя традиционными видами медицинской деятельности – уход , диагностика и лечение отдельных заболеваний и патологических процессов.
Особое медико‑социальное значение приобрели вопросы, связанные с применением разработок медицинской робототехники, пытающихся реализовать некий аналог «электронного помощника врача», который был бы не только советником, но и активным манипуляционным ассистентом.
Если использование хирургических или реанимационных роботов в сфере процедур, связанных с пространственными манипуляциями (инъекции, операционные разрезы и т. п.), сегодня стало обыденным фактом, то до недавнего времени считалось, что современная техника пока не в состоянии в полном объеме заменить координационные и чувствительные способности человеческой руки. Тем не менее, рассматривая массаж как форму механического воздействия, состоящего из трения, смещения, давления и колебаний, – факторов, вызывающих механические деформации мягких тканей, но использующегося с лечебнопрофилактическими целями, вполне обоснованно звучит предложение данное воздействие реализовать аппаратным способом. За счет изменения таких показателей, как время (t), частота воспроизведения приемов (ν), сила давления (F), коэффициент трения (k), направление, траектория движения (Х), площадь воздействия (S), и ряда других механических характеристик, которые могут быть заданы программно, в свою очередь, опосредованно представляется возможным влиять на изменения физических параметров биологических тканей, подлежащих массажному воздействию – напряжение (σ), относительная продольная деформация (ε), значения коэффициента продольного растяжения (Δl), модуль продольной упругости (E), тем самым непосредственно оказывая дозированное вмешательство.
Впервые идея управления аппаратными средствами для массажа с использованием робота была предложена российскими учеными на II симпозиуме по медицинской робототехнике в Гейдельберге в 1997 году. Шестизвенный промышленный робот Puma 560, предназначенный для сборки и дуговой сварки, был дополнен силовым датчиком для измерения усилия взаимодействия инструмента робота с мягкими тканями пациента. Робот «чувствовал» пациента, запоминал его рельеф, упругость, затем вычислял массажные траектории и воспроизводил их своими приводами. Штатная система управления робота, предназначенная для позиционного и контурного управления, соответственно могла реализовать алгоритмы раздельного позиционно‑силового управления. Робот выполнял отдельные приемы техники классического массажа и акупрессуры на манекенах, собаках и людях‑волонтерах. Данный метод массажа был защищен российским патентом.
Позже аналогичную идею реализовали голландские конструкторы E. Drissens и M. Ferstappen (2003), разработав серию роботов для массажа «Tickle».
Первый из роботов имеет металлический корпус, два электромоторчика с напряжением питания 5 В, аккумуляторную батарею и четыре датчика, позволяющих следить за наклоном поверхности, по которой передвигается робот‑массажист. Движение осуществляется с помощью двух силиконовых гусениц, покрытых выступами и непосредственно создающих массажный эффект. Робот весит всего 165 г и способен передвигаться по телу человека со скоростью 1,2 см/с.
Второй робот является более интеллектуальным, но для его использования необходима стационарная массажная установка «Tickle Salon». Она состоит из робота, жидкокристаллического монитора и кровати, на которую ложится человек. Передвигаясь по человеческому телу, датчик постепенно сканирует его, создает карту тела, с помощью которой управляющий элемент робота может определять наиболее чувствительные точки, которые затем робот и будет массировать. Изображение карты тела выводится на монитор, к которому подключена электронная начинка робота.
Другие эксплуатируемые роботные системы, имеющие аналогично предыдущим конструкциям техногенную архитектуру (например, экспериментальный образец робота‑медбрата, разработанный специалистами института автоматизации при Академии наук КНР), или антропоморфное строение, такие, как промышленные модели Sony SDR‑4X, Kawada HPR‑2P, Fejitsu HOAP‑1, J SK H7, MIT Cog и др., на сегодняшний день не в состоянии конкурировать со специально разработанными манипуляционными роботами в совершенстве владения сочленениями «верхних конечностей», так как способны выполнять только грубые функции захвата предметов и переноса грузов, а соответственно, могут быть использованы исключительно в качестве помощников по уходу за больными.
Однако, несмотря на все положительные стороны и потенциальные возможности технической идеи по созданию манипуляционного помощника врача‑массажиста, она имеет ряд слабых мест.
1. Экономическая эффективность робота для массажа в ближайшее время не сможет превзойти ручную работу человека‑манипулятора. Сумма, затрачиваемая на подготовку массажиста и периодическое повышение его квалификации, несоразмеримо меньше, чем производство, покупка, амортизация и обслуживание данной конструкции.
2. К тому же психологический барьер, который возникает у большинства пациентов перед использованием аппаратного воздействия в процессе лечебных процедур (тем более робота), может служить значительным препятствием для широкого применения данной технической разработки в клинической практике.
Таким образом, логично напрашивается вывод о сомнительных перспективах только лечебного использования в клинической практике аналогичных роботных систем в ближайшем будущем.
Тем не менее в ведущих отечественных научноисследовательских центрах в последние годы проводится разработка нового поколения медицинских роботов для массажа и мануальной терапии. Основным отличием от прежних моделей и научной новизной данной системы является попытка полностью заменить мануальную работу специалиста аппаратом с обратной связью и программированными функциями, максимально приблизив его воздействие к мануальным приемам, выполняемым массажистом или врачом и имеющим как лечебное, так и диагностическое назначение.
Наличие обратной связи в устройстве данной системы предоставляет возможность математического или визуального, в графической форме, отображения воздействия, т. е. определив механические свойства мягких тканей, подлежащих массажному воздействию, и задав определенные параметры этого воздействия, в результате можно определить динамику изменений биомеханических показателей массируемых структур как в процессе, так и после массажа. К тому же, как известно, на сегодняшний день нет промышленных образцов специализированной медицинской аппаратуры, способной в каком‑либо наглядном виде отразить совокупный результат массажного воздействия (тонус кожи, тонус мышц, толщину кожной складки, ее подвижность, индексы Кетле, В.В. Бунака и др.).
Помимо этого, воздействие данного робота в сравнении с актом мануального воздействия обладает целым рядом отличительных особенностей, имеющих непосредственное клиническое применение.
Точность воздействия. В ряде случаев в процессе массажной процедуры возникает необходимость оказать чрезвычайно детализированное воздействие на ограниченном локальном участке поверхности тела пациента. Так, при массаже послеоперационного соединительно‑тканного рубца с целю косметической минимизации кожного дефекта или профилактики спаечного процесса массажисту следует производить манипуляции в зависимости от хода линий напряжения Лангера. Невнимание к индивидуальным особенностям анатомического строения кожного покрова, недостаточные знания траектории проведения данных манипуляций и ряд других причин способны привести к нежелательным результатам массажной процедуры, выполняемой руками массажиста. Мехатронная система, предварительно определив степень напряжения тканей, позволяет более точно воздействовать на рубцовую и околорубцовую ткани в соответствии с линиями напряжения, не хаотичными, а ритмичными и строго направленными движениями.
Дозирование воздействия. Нередко в лечебной практике возникает необходимость оказывать дозированное воздействие на те или иные мягкотканные структуры, например при парезах, чтобы не переутомить мышцу механической стимуляцией и не вызвать снижения биоэлектрической активности мышечных волокон. В данном случае, не располагая системами обратной связи, массажист практически никаким способом не может дозировать свои манипуляции, а врач, назначающий эту процедуру, его контролировать. Имея возможность воспроизводить аналоги массажных приемов, таких как поглаживания, растирания, разминания и вибрации, «Мехатронная система для манипуляции на мягких тканях» способна выполнить данное задание с помощью устройства обратной связи, а также строго установив количество выполняемых движений, их интенсивность.
Надежность. Там, где есть однообразные технические приемы массажа или требуется приложение значительных мышечных усилий со стороны массажиста при наличии постоянного потока пациентов, а это прежде всего центры лечебного питания, занимающиеся лечением ожирения, целлюлита, косметические салоны, фитнес‑центры, мехатронная система может стать достойной заменой ручной работы. Если качество массажной процедуры с каждым следующим пациентом у массажиста (любой квалификации) убывает в арифметической прогрессии в течение рабочего дня, то данный недостаток абсолютно отсутствует у роботной системы.
Исключение или минимизация человеческого фактора. Наличие высококонтагиозных заболеваний (корь, краснуха, дифтерия, менингококковая инфекция), а также чрезвычайно опасных болезней, передающихся через кровь и другие биологические жидкости (ВИЧ‑инфекция, вирусные гепатиты В, С, Д, SARS), окончательное излечение от которых пока невозможно, в ряде случаев не исключают использование в процессе лечебных мероприятий процедур массажа для этой категории пациентов. В некоторых случаях существует насущная необходимость проводить процедуры массажа во вредных условиях внешней среды, включая зоны повышенной радиации и запыленности. В подобных ситуациях повышенной эпидемиологической и экологической опасности использование робота для массажа является безальтернативным вариантом, так как работа человека‑массажиста в таких условиях представляет для него определенную опасность.
Тем самым выигрыш робота в процедурах достигается за счет более точных, строго дозированных, многократно повторяющихся однообразных монотонных движений, независимых от утомляемости и субъективных оценок человека‑манипулятора (врача, массажиста), в условиях, несущих определенную долю опасности для него. Особо следует выделить то, что использование рассматриваемой мехатронной системы в качестве лечебно‑диагностического комплекса является особенно перспективным и, по‑видимому, единственным направлением для практического внедрения данной технической идеи роботостроительства – создание робота‑массажиста в медицинской практике. Тем более что потребность в подобных устройствах имеет насущную необходимость как для практической деятельности реабилитационных кабинетов, отделений, центров, санаторно‑курортных учреждений, так и для работы научных институтов, занимающихся проблемами изучения действия массажных манипуляций.
Разрабатываемый медицинский робот является прежде всего умелым и умным помощником. Это – квалифицированный, хорошо обучаемый массажист, выполняющий движения с дозированным усилием, неутомимый, без халтурных движений. Он может заменить массажиста, но не профессионального. Чувствительность рук, тонкая диагностика состояния мягких тканей присущи только профессионалу и недоступны пока для робота. Профессионал может быть мастером, передающим ученику тонкости своего искусства и контролирующим работу. Поэтому проблема грядущей безработицы массажистов является надуманной. Аналогичная «проблема» встречается при внедрении автоматизации в любую область, ранее обслуживаемую низкоквалифицированными рабочими. Выход в повышении квалификации с освоением робототехники.
Разрабатываемый медицинский робот запатентован и представляет приоритет российской медицины и робототехники. Поэтому реализация этой идеи в стране имеет большую экономическую выгоду. Приходится сожалеть, что в России может появиться медицинский робот после закупки его на Западе. Если год назад идея была уникальна, то сейчас на Западе появляются разработки медицинских комплексов для мануальной терапии с использованием промышленного робота Пума, российский аналог которого, РМ‑01, для массажа и мануальной терапии был предложен в России еще в 1997 году.
Таким образом, дальнейшее создание и совершенствование роботных систем для манипуляции на мягких тканях в качестве лечебно‑диагностического комплекса способно открыть новый подход к дозированному, а соответственно и строго научному применению мануального воздействия в клинической практике, что, в свою очередь, открывает новые горизонты в развитии и совершенствовании как техники, так и методологии массажа и мануальной терапии.
Глава 4
Массажные технологии в спа
Сырченко А.И
История «спа»
Вплоть до середины ХХ века под «спа» в основном подразумевалось исключительно гидролечение. «Вода» было ключевым и центральным понятием. Откуда произошло само слово «спа»?
До наших дней дошла правдоподобная легенда, объясняющая происхождение слова «спа» в том значении, которое близко нашему сегодняшнему пониманию этого явления. Во времена Великой Римской империи один из легионов подавлял в низовьях гор Арденн, практически в самом центре Европы, бунт непокорного племени. Нелегкая победа была за римлянами, и в результате тяжелых боев многие легионеры оказались ранеными, а остальные – крайне утомлены. Обычно на восстановление боевого порядка уходило несколько недель. Но в этот раз, выражаясь современном языком, процесс реабилитации раненых и истощенных солдат завершился в течение нескольких дней.
Когда информация о «чудесном исцелении и восполнении сил» дошла до столицы, сенат решил изучить причины «арденнского феномена». Этими причинами оказались несколько факторов, примененных комплексно и систематично в одном месте и последовательно во времени. Умеренное питание (пророщенные злаки, оливковое масло, фруктовые соки), тепловая детоксикация (термы), массаж и масляные растирания во время банного процесса, разумная гимнастика и, самое главное, купание в местных природных источниках минеральной воды и прием ее вовнутрь – вот основные инструменты восстановления, которые «поставили в строй» римских легионеров. Особенно сенат вдохновил факт использования природных минеральных источников. Затрат никаких – а эффект очевиден. И далее последовало «системное решение» (прообраз современного закона о курортах) – римским войскам предписывалось в приграничных территориях природные минеральные источники включать в состав Римской империи, а также минеральные источники, уже находящиеся на территории Римской империи, использовать в оздоровительных и реабилитационных целях. Место, где впервые был получен массовый оздоровительный эффект от комплексного воздействия природных факторов, называлось «спа» (этимология этого слова от английского spaw , которое, в свою очередь, происходит от espa, что на валлонском диалекте означает «фонтан»). Во времена Древнего Рима это было именно место, город Спа возник значительно позже (в 1326 году).
В XIV столетии Спа превратился в гостеприимный курорт, а в XVI веке воды Спа в кувшинах продавали уже во многие страны Европы. С водами модного курорта слово «spa» в буквальном смысле было перенесено в Северную Англию, что на северном диалекте как раз и зазвучало как «spaw». В 1596 году придворный врач королевы Елизаветы I доктор медицины Т. Брайт предложил использовать слово «spaw» для обозначения вод, пригодных для питьевого лечения. Так в XVI веке слово «spa» вошло в английский язык как обозначение места, где лечат целебными водами. Еще Петр Андреевич Вяземский в своей «Записной книжке» за сентябрь 1838 г. писал: «Англичане уморительны со своими иностранными наименованиями. У них все минеральные воды Спа…»
В 1717 г. на водах в Спа лечился Петр I. Как писал в своих записках «Pierre le Grand aux eaux de Spa» Альбин Боди, «непомерные труды последних лет и полное пренебрежение своим здоровьем не остались без вреднаго влияния на богатырскую натуру царя». По совету доктора Арескина (лейб‑медик Петра I Роберт Эрскин) Петр Алексеевич отправился на лечение водами целебных источников в Спа в австрийских Нидерландах (нынешняя Бельгия).
В течение четырех недель (с 24 июня по 25 июля 1717 г.) Петр Алексеевич пил целебные Пуонские воды, кстати, «pouhon» – валлонское слово – «минеральный источник». Вернувшись домой, государь повелел искать лечебные воды, коих немало было найдено на бескрайних просторах Российской империи, а место, где возможно было проходить лечение водами, было названо лейб‑медиком Петра I доктором Готлибом Шобером (немцем по происхождению) курортом – «лечебным местом».
На целебных водах, найденных по Указу великого государя всея Руси, были построены курорты, и на карте России появились Марциальные воды, Липецкие воды, Сергиевские воды, Кавказские Минеральные Воды, Столыпинские воды (ставшие впоследствии Чапаевскими).
Петр Великий пожелал увековечить память о пребывании своем в городе Спа. По распоряжению царя в Спа был поставлен памятник работы одного амстердамского скульптора, на котором начертана на латинском языке следующая надпись, сочиненная одним из приближенных царя: «Божией Милостию Петр I, царь всероссийский… ознакомившись с нравами различных европейских народов, посетив Францию, Намюр и Люттих, прибыл к этим водам в Спа, как к источнику спасения; после успешнаго лечения этими целебными водами, главным образом водами Жеронстерскаго источника, он вновь получил свои прежния силы и здоровье; июля 22‑го дня 1717 года отправился в Голландию и, возвратившись в свою империю, повелел воздвигнуть здесь этот памятник в знак своей вечной признательности, в 1718 году».
Существует и еще одна популярная версия происхождения слова «спа» как аббревиатуры латинского «sanus per aqua» – «здоровье через воду». Однако, несмотря на то что именно эта версия считается почти канонической, популярна она стала лишь в конце XX века, когда латынь как язык общения уже умерла. На латыни к этому времени говорили лишь медики и юристы. Поэтому, скорее всего, попытка прибегнуть к латинскому языку в ХХ веке – это проверенный маркетинговый прием «искусственного старения», призванный увеличить добавленную стоимость спа‑процесса как бизнеса.
В любом случае смысловое значение «спа» до второй половины ХХ века было связано исключительно с загородными курортами и гидролечением. Официальная медицина в разных странах и в разное время по‑разному относилась к спа. От откровенных гонений до включения методов спа‑терапии в общую систему реабилитации и профилактической медицины.
В нашей стране, обладающей своими собственными разнообразными минеральными природными источниками, на протяжении многих лет велась серьезная исследовательская работа, сформировалась научная платформа отечественной курортологии, были изучены лечебные эффекты природных факторов. Можно утверждать, что роль России и СССР в мировом спа‑движении до конца ХХ века сказывалась именно в научном обосновании многих методов и средств, применяемых в спа. Именно по этой причине спа в России рассматривается наряду со спортивной медициной, медицинской реабилитацией в качестве составной части системы здравоохранения, а именно «рекреационной медицины». Рекреация (от лат. recreatio – восстановление) – комплекс оздоровительных мероприятий, осуществляемых с целью восстановления нормального самочувствия и работоспособности здорового, но утомленного человека. Понятие охватывает все виды отдыха – санаторно‑курортное лечение, туризм. Восстановление эмоциональных и психологических сил, здоровья и трудоспособности путем отдыха вне жилища: на лоне природы, в туристической поездке и т. п. Специализированными предприятиями для рекреации считаются санатории, профилактории, пансионаты и др. Понятие стало использоваться в 60‑х годах XX века в физиологической, медицинской, социальноэкономической литературе, по проблемам восстановления сил и здоровья рабочих. В последние годы XX века категорию активной рекреации стали наименовать велнес направлением, а пассивной – спа.
Рекреация в научном смысле имеет свои функции, в том числе медико‑биологическую, воспитательную (социальнокультурную) и экономическую. В медико‑биологической функции различают два аспекта: санаторно‑курортное лечение и оздоровительный отдых. Оба предполагают восстановление работоспособности и снятие у человека нервно‑психического напряжения с помощью естественных факторов природы, средствами физической культуры, психотерапевтическими и физиотерапевтическими методами оздоровления, а также культурно‑развлекательными мероприятиями.
Воспитательная функция определяет познавательную рекреационную деятельность, связанную с осмотром новой территории, природного ландшафта, предполагает знакомство с памятниками и другими культурно‑историческими ценностями.
Экономическая функция – это возможность, вследствие рекреационных мероприятий, обеспечивать простое расширенное воспроизводство рабочей силы. Благодаря активному отдыху, у пользующегося санаторными услугами повышается производительность труда, увеличивается период сохранения полной работоспособности, снижается уровень заболеваемости.
Ключевой девиз современного спа в контексте рекреационной медицины – «здоровье здоровых».
Дата добавления: 2019-09-13; просмотров: 188; Мы поможем в написании вашей работы! |

Мы поможем в написании ваших работ!