V. Таблицы результатов измерений.
Данные установки:
Масса стержня: (_________ ± _____) г.
Длина стержня: (_________ ± _____) мм.
Масса груза на стержне: (________ ± _____) г.
Диаметр малого шкива (________ ± _____)мм.
Диаметр большого шкива (________ ± _____)мм.
Масса основного груза (________ ± _____)г.
Масса разновесов (________ ± _____)г.
(________ ± _____)г.
(________ ± _____)г.
Масса наборного груза: m = ________, Δm = __________
Измерение R:
a) Грузы на концах стержней:
ℓ1 = ____________ , ℓ2 = ____________ , ℓ3 = ____________ , ℓ4 = ____________
R1 = R2 = __________.
б) Грузы посередине стержней:
ℓ1 = ____________ , ℓ2 = ____________ , ℓ3 = ____________ , ℓ4 = ____________
R3 = _________________
ΔR1 = ΔR2 = ΔR3 = 4 мм.
Измерение времени падения грузов:
| № опыта | Большой шкив | Малый шкив | Малый шкив | |||
| Грузы на концах | Грузы на концах | Грузы посередине | ||||

| 
| 
| 
| 
| 
| |
| Среднее значение | ||||||
Приборная погрешность времени: Δtприб = 5·10-3 с
Для каждой серии измерений рассчитать средние значения времени и их случайные погрешности. Конечное значение случайной погрешности в серии принимается равным наибольшему ее значению в данной серии.
|
|
|
VI. Обработка результатов измерений.
1. По формулам (3) и (7) рассчитать ε1/ε2 и М1/М2.
Рассчитать относительные погрешности этих отношений по формулам:
 ;
;  .
.
Рассчитать «абсолютные» погрешности Δ(ε1/ε2) и Δ(M1/M2). Записать результаты расчетов по п.п. 1-2 в виде:
 ;
;  .
.
2. Найти разность  и сравнить ее с суммой «абсолютных» погрешностей соотношений. Сделать вывод о качестве эксперимента.
и сравнить ее с суммой «абсолютных» погрешностей соотношений. Сделать вывод о качестве эксперимента.
3. По формуле (9) рассчитать момент инерции крестовины J0. Определить его относительную погрешность:
 .
.
Рассчитать абсолютную погрешность ΔJ0.
4. Рассчитать моменты инерции системы J2 и J3 по формуле (8). Определить их абсолютные погрешности по формуле:
 .
.
8. Записать результаты в виде:
 ;
;  .
.
9. По формулам (4) и (10) рассчитать отношение угловых ускорений ε2/ε3 и моментов инерции J3/J2.
Рассчитать относительные погрешности этих отношений:
 ,
,  .
.
Рассчитать «абсолютные» погрешности Δ(ε2/ε3) и Δ(J3/J2). Записать результаты расчетов в виде:
 ;
;  .
.
Рассчитать разность  и сравнить ее с суммой «абсолютных» погрешносей соотношений. Сделать вывод о полученном результате.
и сравнить ее с суммой «абсолютных» погрешносей соотношений. Сделать вывод о полученном результате.
Контрольные вопросы.
1. Законы Ньютона. Физический смысл массы и силы.
|
|
|
2. Момент инерции: определение, физический смысл. От чего зависит момент инерции твердого тела?
3. Теорема Штейнера.
4. Понятие момента силы относительно точки и оси.
5. Основной закон динамики вращательного движения.
6. Запишите основной закон динамики поступательного движения и основной закон динамики вращательного движения в применении к маятнику Обербека.
7. Почему в том случае, когда грузы расположены ближе к оси вращения, время движения меньше?
8. При любом ли расположении грузов на стержнях можно пользоваться формулой (8) для вычисления момента инерции?
9. Какая сила создает вращающий момент в данной работе? От каких параметров системы она зависит?
10. Для чего необходимо отбалансировать маятник?
11. Меняется ли вращающий момент при изменении положения грузиков на стержнях? при изменении шкива? при изменении движущей массы?
12. Каковы должны быть разности  и
и  , если опыты проведены правильно?
, если опыты проведены правильно?
12.
№ 1.8а « ИЗУЧЕНИЕ ЗАКОНОВ СОХРАНЕНИЯ ЭНЕРГИИ И МОМЕНТА ИМПУЛЬСА С ПОМОЩЬЮ БАЛЛИСТИЧЕСКОГО МАЯТНИКА»
(вариант 1)
I. Цель работы : ознакомление с принципом работы баллистического крутильного маятника; определение скорости полета пули, попавшей в него.
|
|
|
II. Описание установки
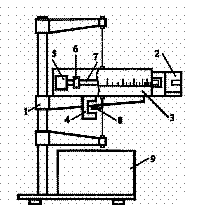
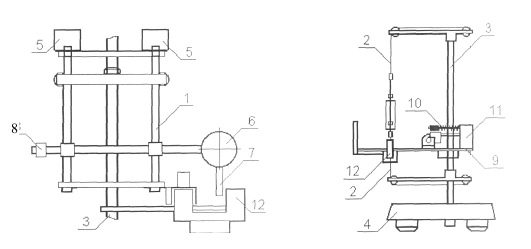 Рисунок 15 – Общий вид установки ФМ-15 Рисунок 15 – Общий вид установки ФМ-15
|
Работа выполняется на установке ФМ-15, общий вид которой представлен на рисунке 15. Основным элементом установки является крутильный маятник, представляющий собой металлическую рамку 1, подвешенную на стальной нити 2. Нить подвеса закреплена вертикально в натянутом состоянии на стойке 3 с основанием 4. Рамка может совершать крутильные колебания вокруг вертикальной оси, проходящей через ее ось симметрии. На ней имеются места для крепления двух дополнительных грузов 5 симметрично относительно оси. К ней же крепится «мишень» 6 в виде диска, поверхность которого покрыта тонким слоем пластилина, флажок 7 для контроля ее колебаний и противовес 8. «Пулей» служит металлическая втулка. К стойке на кронштейне 9 крепится «пистолет», состоящий из направляющего стержня с пружиной 10 и спускового устройства 11. К стойке также на кронштейне крепится фотодатчик 12. Регистрация числа и времени колебаний осуществляется блоком электронным ФМ-1/1 (на рис.15 не показан).
Если освободить пулю от стреляющего устройства, то она вклеится в пластилин на мишени крутильного маятника и вызовет отклонение последнего на некоторый угол от положения равновесия. Кинетическая энергия маятника, полученная им от пули, постепенно будет переходить в потенциальную энергию упругой деформации закручивающейся нити. Затем начнется процесс перехода потенциальной энергии в кинетическую и т.д. Маятник будет совершать гармонические крутильные колебания, период которых значительно больше времени соударения.
|
|
|
III. Методика измерений и расчетные формулы.
Систему пуля – маятник можно считать замкнутой. Применим к ней закон сохранения момента импульса:
 ,
,
где m и υ– масса и скорость пули соответственно; r– расстояние от оси вращения маятника до центра масс пули в месте ее вклеивания; J– момент инерции маятника; Jп– момент инерции пули относительно оси вращения маятника; ω0– начальная угловая скорость маятника.
Поскольку Jп<<J, то
 . (1)
. (1)
Из (1) следует, что для определения скорости пули необходимо найти момент инерции и начальную угловую скорость маятника; величины m и r могут быть измерены прямо.
Для определения ω0 воспользуемся законом сохранения механической энергии и основным законом динамики вращательного движения.
Маятник совершает крутильные колебания под действием момента силы упругости нити, пропорционального углу поворота маятника φ:
 ,
,
где k – модуль кручения. Знак минус указывает на то, что псевдовектор М направлен против псевдовектора φ отклонения маятника.
Элементарная работа против сил упругости по закручиванию нити на малый угол dφ равна:
 .
.
После интегрирования получаем:  .
.
Если пренебречь незначительными потерями на трение, то можно записать:
 , или
, или  , (2)
, (2)
где φmax — максимальный угол отклонения маятника от положения равновесия.
По основному закону динамики вращательного движения:
 , или
, или  .
.
Частным решением этого уравнения является
 ,
,
в чем можно убедиться непосредственной подстановкой.
Величина  в последнем выражении является циклической частотой колебаний, которая по определению равна
в последнем выражении является циклической частотой колебаний, которая по определению равна  . Поэтому маятник будет совершать гармонические колебания с периодом
. Поэтому маятник будет совершать гармонические колебания с периодом
 . (3)
. (3)
Подставив в формулу (3) выражение для  из формулы (2), получим следующее выражение для начальной угловой скорости маятника:
из формулы (2), получим следующее выражение для начальной угловой скорости маятника:
 . (4)
. (4)
Для определения скорости пули требуется также найти момент инерции, для определения которого, в свою очередь, необходимо найти жесткость подвеса k. Величину k можно исключить, если измерить сначала период колебаний пустой рамки (T0), а затем установить на рамку цилиндрические грузы 5 (см. рис. 1) и измерить период колебаний рамки с грузами (T1). Решая совместно уравнения вида (3) для пустой и нагруженной рамки, получим момент инерции пустой рамки:
 , (5)
, (5)
где mгр – масса груза, r1 – радиус груза, ℓ1 – расстояние от оси вращения рамки до оси груза.
Момент инерции нагруженной рамки составляет:
 . (6)
. (6)
IV. Порядок выполнения работы.
1. Установить «мишень» на рамке. Убедиться, что «мишень» находится на линии «выстрела» и перпендикулярна ей, а флажок пересекает при колебаниях рамки оптическую ось фотодатчика.
2. Установить «пулю» на направляющий стержень «пистолета», взвести пружину и произвести «выстрел».
3. Визуально определить угол φmax максимального отклонения рамки по шкале угловых перемещений с помощью флажка, закрепленного на рамке. Измерить штангенциркулем или линейкой расстояние r от оси вращения рамки до центра отпечатка «пули» в мишени. Результаты записать в таблицу 1.
4. Повторить измерения по п.4 не менее пяти раз.
5. Включить электронный блок. Отклонить рамку с грузами на угол 30° и зафиксировать с помощью электромагнита. Нажать на электронном блоке кнопку «СБРОС», при этом должны обнулиться показания счетчиков колебаний и времени.
6. Нажать кнопку «ПУСК», при этом выключится электромагнит, и начнутся крутильные колебания рамки. Определить время t, за которое происходит N = 10 колебаний рамки. (Кнопку «СТОП» нажать на девятом колебании). Результат записать в таблицу 2.
7. Пункт 6 повторить 5 раз.
8. Установить грузы на рамке и измерить времяt1, за которое происходит N1 = 10 колебаний рамки с грузами.
V. Таблицы результатов измерений.
Данные установки:
Масса груза: mгр = ___________; Δmгр = ___________.
Радиус груза: r1 = ____________; Δr1 = ____________.
Масса пули: m = ____________; Δm = ____________.
Расстояние от оси вращения маятника до оси груза: ℓ1 = ______; Δℓ1 = ______.
Измерение r и φ.
Приборные погрешности: Δrприб = _____________; Δφприб = _____________.
Таблица 1.
| № опыта | r, мм | Δr, мм | φ, град. | Δφ, град. |
| 1 | ||||
| 2 | ||||
| 3 | ||||
| средние значения |
Окончательные результаты записать в виде:
r = rср ± Δr ; φ = φср ± Δφ.
3. Измерение периода колебаний (две серии опытов).
Приборная погрешность времени: Δtприб = 5·10-4 с.
Таблица 2.
| № опыта | Рамка без грузов | Рамка с грузами | ||
| Т0 | ΔТ0 | Т1 | ΔТ1 | |
| Средние значения | ||||
VI. Обработка результатов измерений.
1. Используя формулу (4), определить угловую скорость. Определить относительную погрешность:
 .
.
Определить абсолютную погрешность Δω. Записать окончательный результат в виде:  .
.
2. По формуле (5) рассчитать момент инерции J рамки без грузов.
3. Рассчитать относительную погрешность по формуле:
 .
.
4. Определить абсолютную погрешность и записать окончательный результат в виде:
J = Jрасч ± ΔJ.
5. По формуле (1) рассчитать скорость пули. Рассчитать относительную погрешность по формуле:
 .
.
Рассчитать абсолютную погрешность и записать окончательный результат: υ = υср ± Δυ.
6. Сделать вывод о качестве проведенных опытов.
Контрольные вопросы.
1. Законы Ньютона. Физический смысл массы и силы.
2. Закон сохранения механической энергии.
3. Момент инерции: определение, физический смысл. От чего зависит момент инерции?
4. Теорема Штейнера.
5. Понятия момента силы и момента импульса относительно точки и оси.
6. Основной закон динамики вращательного движения.
7. Закон сохранения момента импульса.
8. Какие колебания называются гармоническими? Какие силы участвуют в создании гармонических колебаний крутильного маятника?
9. Как рассчитывается момент инерции системы?
10. Каким способом меняется момент инерции?
11. Для определения скорости пули «выстрелы» производились по пустой рамке, т.е. требовалось определить момент инерции пустой рамки. Для чего же проводились измерения периода колебаний нагруженной рамки?
12. Поясните вывод формул (1),(4),(5) и (6).
№ 1.8 «ИЗУЧЕНИЕ ЗАКОНОВ СОХРАНЕНИЯ ЭНЕРГИИ ИМОМЕНТА ИМПУЛЬСА С ПОМОЩЬЮ БАЛЛИСТИЧЕСКОГО МАЯТНИКА»
(вариант 2)
I . Цель работы: ознакомление с принципом работы баллистического крутильного маятника; определение скорости полета пули, попавшей в него.
II . Описание установки.
Общий вид баллистического крутильного маятника представлен на рисунке 16. К кронштейну 1 прикреплены: стреляющее устройство 2, прозрачный экран с нанесенной на него угловой шкалой 3 и фотоэлектрический датчик 4. Маятник состоит из двух мисочек, наполненных пластилином 5, двух перемещаемых грузов 6, двух стержней 7 и флажка 8.
 Если освободить пулю от стреляющего устройства, то она вклеится в пластилин, находящийся в мисочках крутильного маятника, и вызовет отклонение последнего на некоторый угол от положения равновесия. Кинетическая энергия маятника, полученная им от пули, постепенно будет переходить в потенциальную энергию упругой деформации закручивающейся нити.
Если освободить пулю от стреляющего устройства, то она вклеится в пластилин, находящийся в мисочках крутильного маятника, и вызовет отклонение последнего на некоторый угол от положения равновесия. Кинетическая энергия маятника, полученная им от пули, постепенно будет переходить в потенциальную энергию упругой деформации закручивающейся нити.
Затем начнется процесс перехода потенциальной энергии в кинетическую и т.д. Маятник будет совершать гармонические крутильные колебания, период которых значительно больше времени соударения.
| Рисунок 16 – Маятник баллистический (общий вид) |
Дата добавления: 2019-09-02; просмотров: 311; Мы поможем в написании вашей работы! |

Мы поможем в написании ваших работ!