IV .Порядок выполнения работы
1.
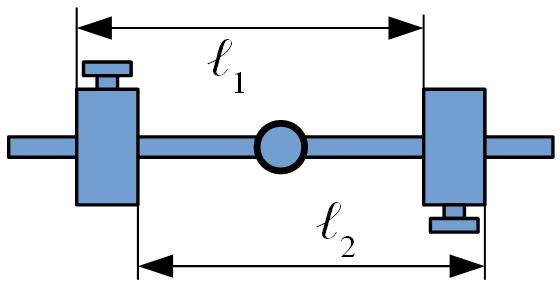 Рисунок 17 – К определению величин R1 и R2 Рисунок 17 – К определению величин R1 и R2
|
 .
.
Принять погрешность ΔR1 = 1 мм.
2. Обнулить, если это необходимо, маятник: черта на мисочке должна показывать угол α = 0.
3. Выстрелить пулю из стреляющего устройства и измерить максимальный угол отклонения маятника αmax от положения равновесия, а также расстояние от оси вращения до места вклеивания пули r. Опыт повторить 3-5 раз.
4. Нажать кнопку "Сеть".
5. Отклонить рукой маятник на небольшой угол α< αmax, нажать кнопку "Сброс" и отпустить маятник.
6. Измерить время t десяти колебаний: кнопку "Стоп" нажать в момент появления на счетчике периодов цифры "9".
7. Повторить измерения по п.п. 5, 6 не менее 5 раз.
8. Максимально отдалить грузы от оси колебаний (R 2 = Rmax). Измерить R2 аналогично п.1. Измерить время 10 колебаний аналогично п.6.
V. Таблицы результатов измерений
1. Данные установки:
Масса груза  =______________;
=______________;  = ____________.
= ____________.
Масса пули  =______________;
=______________;  = ____________.
= ____________.
2. Измерение R, r, αmax:
 ________; (Δr)приб=__________; (Δαmax)приб =______________.
________; (Δr)приб=__________; (Δαmax)приб =______________.
Расчет: (Δr)случ=__________; (Δαmax)случ =______________.
3. Измерение периода колебаний (две серии опытов).
Δtприб = 5·10-4 с.
Расчет: Δtслуч =___________.
Период колебаний: T = t/n; ΔT = Δt/n.
|
|
|
Результаты измерений свести в таблицу вида:
R = _______________±_______
| № опыта | α, град. | Δα, град. | t, с | Δt, с |
| 1 | ||||
| 2 | ||||
| 3 | ||||
| 4 | ||||
| 5 | ||||
| Средние значения |
α = __________±_____; t = __________±______; T = _________±________
VI. Обработка результатов измерений
1. Используя формулу (4), определить угловую скорость.
2. Рассчитать относительную погрешность угловой скорости Δω0/ω0 по формуле:
 .
.
Рассчитать абсолютную погрешность Δω. Записать окончательный результат с учетом округления:
ω0 = ____________±______.
3. По формулам (10) и (11) рассчитать моменты инерции J 1 и J 2.
Рассчитать относительную погрешность момента инерции по формуле:

Рассчитать абсолютную погрешность момента инерции ΔJ. Записать окончательный результат с учетом округления:
J1 = ___________±______; J2 = _____________±________.
4. По формуле (1) рассчитать скорость пули.
5. Рассчитать относительную погрешность Δυ/υ по формуле:
 .
.
6. Определить абсолютную погрешность скорости пули:
Δυ = υср·(Δυ/υ)max.
Записать окончательный результат с учетом округления:
 .
.
7. Сделать вывод о качестве проведенных опытов.
|
|
|
Контрольные вопросы
1. Законы Ньютона. Физический смысл массы и силы.
2. Закон сохранения механической энергии.
3. Момент инерции: определение, физический смысл. От чего зависит момент инерции?
4. Теорема Штейнера.
5. Понятия момента силы и момента импульса относительно точки и оси.
6. Основной закон динамики вращательного движения.
7. Закон сохранения момента импульса.
8. Какие колебания называются гармоническими? Какие силы участвуют в создании гармонических колебаний крутильного маятника?
9. Как рассчитывается момент инерции системы?
10. Каким способом меняется момент инерции?
11. «Обстрел» маятника производился с одним вариантом расположения грузов на стержне. Для чего же определяются периоды колебаний при двух вариантах расположения грузов?
12. Поясните вывод формул (1),(4),(10) и (11).
№ 1.9а « ИЗУЧЕНИЕ ЗАКОНА СОХРАНЕНИЯ МОМЕНТА КОЛИЧЕСТВА ДВИЖЕНИЯ С ПОМОЩЬЮ ГИРОСКОПА »
I .Цель работы: изучение законов сохранения момента импульса, определение угловой скорости прецессии гироскопа.
II .Описание установки
Для выполнения работы используется установка «Гироскоп ФМ-18M», общий вид которой представлен на рисунке 18. В состав установки входят:
|
|
|

| Рисунок 18 – Общий вид установки ФМ-18М |
2) корпус 4 с узлом подшипников, вертикальным валом с винтом фиксации 13 и коллектором. На валу установлены лимб 12 и вилка 6. Лимб и указатель 5, установленный на корпусе 4, предназначены для определения угла поворота гироскопической системы во время прецессии. На вилке 6 установлена гироскопическая система 8, которая состоит из электродвигателя-маховика с встроенным датчиком скорости вращения и стержней 7, 11.Гироскопическая система настроена так, что центр тяжести маховика находится точно над точкой опоры гироскопа O. При этом ℓ = 0. Поскольку стержни 7, 11 совершенно одинаковые, то суммарный момент внешних сил равен нулю. На стержни в процессе работы устанавливается противовес 10 с фиксирующим винтом 9;
3) электронный блок, который подключается к разъему 14 гироскопа с помощью кабеля (на рис. 18 не показан).
Дата добавления: 2019-09-02; просмотров: 198; Мы поможем в написании вашей работы! |

Мы поможем в написании ваших работ!