Сложение скоростей и ускорений при сложном движении точки
Не останавливаясь на доказательстве, сформулируем и обсудим содержание двух основных теорем теории сложного движения точки. (Доказательства этих теорем приведены в учебнике.....)
Для вычисления абсолютной скорости точки получается вполне ожидаемый результат:
абсолютная скорость точки равна геометрической сумме относительной и переносной скоростей:
 (3.1)
(3.1)
Абсолютное ускорение точки вычисляется при помощи теоремы Кориолиса:
 (3.2)
(3.2)
где вектор
 (3.3)
(3.3)
называется ускорением Кориолиса.
Таким образом,
абсолютное ускорение точки равно геометрической сумме относительного, переносного и кориолисова ускорений.
Как видно, абсолютное ускорение содержит несколько неожиданное слагаемое – ускорение Кориолиса. Поясним причину возникновения ускорения Кориолиса на простейшем примере. Пусть стержень  вращается вокруг оси
вращается вокруг оси  . Вдоль стержня движется точка
. Вдоль стержня движется точка  .
.

|

| |
| Рис.3.2 | Рис.3.3 |
Абсолютная производная от вектора относительной скорости характеризует изменение с течением времени вектора  по отношению к неподвижной системе координат. Вектор относительной скорости может изменяться в ходе относительного движения в силу кривизны относительной траектории или неравномерности относительного движения. Эти изменения учитывает вектор относительного ускорения. Но вектор относительного ускорения не может учесть поворот вектора , происходящий вместе с поворотом подвижного пространства (Рис. 3.2). Это изменение, наблюдаемое только из неподвижной системы отсчета, учитывает половина ускорение Кориолиса.
по отношению к неподвижной системе координат. Вектор относительной скорости может изменяться в ходе относительного движения в силу кривизны относительной траектории или неравномерности относительного движения. Эти изменения учитывает вектор относительного ускорения. Но вектор относительного ускорения не может учесть поворот вектора , происходящий вместе с поворотом подвижного пространства (Рис. 3.2). Это изменение, наблюдаемое только из неподвижной системы отсчета, учитывает половина ускорение Кориолиса.
|
|
|
С другой стороны, абсолютная производная от вектора переносной скорости характеризует изменение с течением времени вектора  по отношению к неподвижной системе координат. Вектор переносной скорости может изменяться в ходе переносного движения. Эти изменения учитываются ускорением точки
по отношению к неподвижной системе координат. Вектор переносной скорости может изменяться в ходе переносного движения. Эти изменения учитываются ускорением точки  , т.е. переносным ускорением. Но переносное ускорение не может учесть изменение переносной скорости, происходящее за счет относительного движения. Дело в том, что, совершая относительное движение, точка
, т.е. переносным ускорением. Но переносное ускорение не может учесть изменение переносной скорости, происходящее за счет относительного движения. Дело в том, что, совершая относительное движение, точка  переходит из точки
переходит из точки  стержня в другую точку
стержня в другую точку  , где переносная скорость уже другая (Рис. 3.3). Это изменение учитывает вторая половина ускорение Кориолиса.
, где переносная скорость уже другая (Рис. 3.3). Это изменение учитывает вторая половина ускорение Кориолиса.
|
|
|
Один из сомножителей ускорения Кориолиса  – вектор угловой скорости подвижной системы отсчёта. Введение в рассмотрение вектора угловой скорости связано со многими обстоятельствами, важнейшее из которых – стремление использовать аппарат векторной алгебры для описания движения.
– вектор угловой скорости подвижной системы отсчёта. Введение в рассмотрение вектора угловой скорости связано со многими обстоятельствами, важнейшее из которых – стремление использовать аппарат векторной алгебры для описания движения.
Вектор угловой скорости должен задавать положение оси вращения в пространстве. Для этого договоримся располагать этот вектор вдоль оси вращения. Чтобы по направлению вектора угловой скорости можно было судить о направлении вращения тела, будем направлять вектор угловой скорости так, чтобы с его конца вращение тела было бы видно происходящим против хода часовой стрелки. Итак,
вектор угловой скорости тела расположен вдоль оси вращения и направлен в ту сторону, откуда вращение тела видно происходящим против хода часовой стрелки.
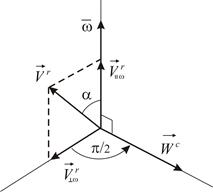
Как следует из определения (3.3), вектор ускорения Кориолиса перпендикулярен плоскости, содержащей вектор угловой скорости подвижной системы отсчета и вектор относительной скорости точки, причем направлен в ту сторону, откуда кратчайший поворот от вектора  к вектору виден против хода часовой стрелки (Рис. 3.4). Модуль ускорения Кориолиса определяется по формуле:
к вектору виден против хода часовой стрелки (Рис. 3.4). Модуль ускорения Кориолиса определяется по формуле:
|
|
|
 где
где  (4.4)
(4.4)
|
| |
| Рис. 3.4 | Рис. 3.5 |
Правило Жуковского (Рис. 3.4):
для определения направления ускорения Кориолиса необходимо проекцию вектора относительной скорости на плоскость, перпендикулярную вектору угловой скорости подвижной системы отсчета, повернуть в сторону вращения на угол  .
.
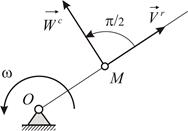
Особенно удобно применять правило Жуковского в тех часто встречающихся случаях, когда вектор относительной скорости перпендикулярен вектору угловой скорости подвижной системы отсчета (Рис. 3.5).
ВОПРОСЫ ДЛЯ САМОКОНТРОЛЯ
- Что называется сложным движением точки?
- Что называется относительной скоростью и относительным ускорением точки?
- Что называется переносной скоростью и переносным ускорением точки?
- В чём состоит теорема сложения скоростей?
- В чём состоит теорема сложения ускорений?
- Как вычисляется ускорение Кориолиса?
- В чём состоит правило Жуковского?
ПРАКТИЧЕСКОЕ ЗАНЯТИЕ № 1(9)
КИНЕМАТИКА ТОЧКИ
Дата добавления: 2019-09-02; просмотров: 242; Мы поможем в написании вашей работы! |

Мы поможем в написании ваших работ!