Опыт показал, что при одновременной работе 50 станций полоса частот линейного тракта должна быть порядка 3 МГц.
ОСНОВНЫЕ ПОНЯТИЯ И ОПРЕДЕЛЕНИЯ СИСТЕМ ПЕРЕДАЧИ ИНФОРМАЦИИ
1.1. СООБЩЕНИЕ, СИГНАЛ, КАНАЛ, СИСТЕМА СВЯЗИ.
Под связью понимается передача информации от отправителя (источника) к получателю. В дальнейшем будем рассматривать только электросвязь, при которой передача информации осуществляется электрическими сигналами. Слово информация латинское и переводится как "сведения". Применительно к связи под информацией понимают те сведения, которые являются объектом передачи, переработки и хранения. Само понятие информации неотделимо от понятия системы, например, управления или связи. Применительно к таким системам информация есть не что иное, как новые сведения об объекте управления или связи, которые заключены в передаваемом сообщении. Сообщением называют совокупность сведений о состоянии некоторого материального объекта. Для передачи сообщения на расстояние необходимо применить какой-либо физический процесс, в изменений параметров которого было бы заключено сообщение. Преобразованный к такому виду физический процесс называется сигналом. Таким образом, передача сообщений от отправителя (источника) к получателю осуществляется с помощью сигналов, которые являются материальными переносчиками информации в системе связи.
В самом общем случае система связи - это часть системы управления, представляющая собой организационно-техническое объединение сил и средств связи, предназначенная для обмена сообщениями между абонентами. Абонентом может быть человек, автомат, электронно-вычислительная машина и т.п., использующие оконечные абонентские устройства типа телефонных и телеграфных аппаратов, дисплеев, передающихкамер в телевидении и др.
Обобщенная структурная схема системы связи (системы передачи) показана на рис. 1.1. Здесь абоненты обозначеныкак источник и получатель сообщений.
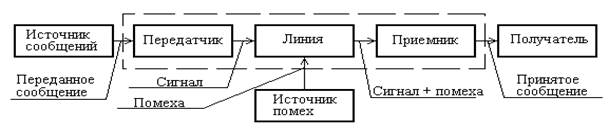 Рис.1.1
Рис.1.1
Процесс передачи сообщения от источника к получателю осуществляется следующим образом. Сообщение поступает от источника в передатчик, в котором осуществляется его преобразование в электрический сигнал, удобный для передачи по линии связи. На другой стороне в приемнике производится обратное преобразование электрического сигнала в исходное сообщение. В идеальном случае так оно и происходит. Однако, реально на передаваемый сигнал в линии связи, да и в самих передатчике и приемнике, действуют сторонние возмущения, которые его искажают. Все эти сторонние возмущения называется помехами. Их условно включают в источник помех.
В связи с действием помех на приемник поступитискаженныйсигнал, который после обратного преобразования будет превращен в сообщение. Степень совпадения передаваемого и принятого сообщения будет определяться характером и интенсивностью помех в канале связи.
Каналом связи (каналом передачи) называется совокупность технических средств и среды распространения, обеспечивающая при подключении абонентских оконечных устройств передачу сообщений от источника к получателю. Канал связи в зависимости от вида передаваемых сообщений может называться телефонным, телеграфным, телевизионным и др. В его состав входит линия связи, которая и представляет собой среду распространения сигналов. Это может быть либо проводная линия (пара проводов, кабель, волновод), либо радиолиния. Радиолиния включает в себя средства радиосвязи, а также область пространства, в котором распространяются радиоволны от передатчика к приемнику.
Системой связи (системой передачи) называется совокупность технических средств и среда распространения, обеспечивающая формирование каналов связи и передачу поним различного рода сообщений между абонентами.
Наиболее дорогостоящей частью системы связи является линия связи, поэтому ее стараются использовать наилучшим образом. Это достигается либо увеличением скорости передачи, либо одновременной передачей по линии нескольких независимых сообщений. В последнем случае система связи называется многоканальной. Такая система требует специальной каналообразующей аппаратуры для формирования, а затем разделения сигналов отдельных сообщений на приемной стороне по некоторым отличительным признакам (частотным, временным и др.).
Любая система связи характеризуется несколькими показателями, главными из которых является пропускная способность, достоверность передачи и помехоустойчивость.
Пропускная способность характеризует максимальную скорость передачи информации, которая может быть достигнута при условии, что канал связи не вносит искажений и ошибок.
Достоверность передачи определяется степенью искажения сигнала, т.е. тем, насколько принятый сигнал соответствует переданному.
Помехоустойчивость характеризует способность системы связи противостоять вредному действию помех при передаче сообщений.
Рассмотрим первоначально обобщенные физические характеристики сигналов, которые являются материальным носителем сообщений. Ранее уже отмечалось, что сообщение - это то, что подлежит передаче. В качестве сообщения может выступать речь, музыка, письменный текст, цифровые данные, телевизионное изображение и т.п. Уже из этого перечня сообщений видно, что одни сообщения являются непрерывными (речь, музыка), а дру-гие - дискретными (текст, цифры). Источником и получателем сообщений могут быть человек, автомат, электронно-вычислительная машина и т.п. Для того, чтобы передать сообщение на расстояние, необходимо преобразовать его в некоторый физический процесс, параметры которого изменялись бы по закону передаваемого сообщения. Таким образом, сигнал есть процесс, отображающий сообщение в форме определенного электрического возмущения. Это позволяет по принятому сигналу восстановить переданное сообщение.
Необходимо четко усвоить, что сигналом является не сам физический процесс, а изменяющиеся его параметры, которые определяются характером самого сообщения. Рассмотрим, каким образом формируется непрерывные и дискретные сигналы.
В качестве непрерывного сообщения может выступать звуковое давление, яркость свечения и т.п., которые изменяют свои значения на определенном интервале времени. Сообщения такого типа преобразуются в оконечных абонентских устройствах в электрический первичный сигнал. Так при формировании речевого сигнала в качестве электроакустического преобразователя используется микрофон, который превращает звуковые колебания речи в низкочастотный непрерывный электрический сигнал (видеосигнал). На небольшие расстояния этот сигнал может передаваться непосредственно по линиям телефонной связи. Однако, если речевой сигнал необходимо передавать на значительные расстояния, то его необходимо преобразовать в высокочастотный сигнал (радиосигнал). В этом случае этот сигнал передается по кабелю или радио. Преобразование непрерывного сообщения A(t) в видеосигнал u(t), а затем в высокочастотный сигнал S(t), иллюстрируется рис.1.2,а.
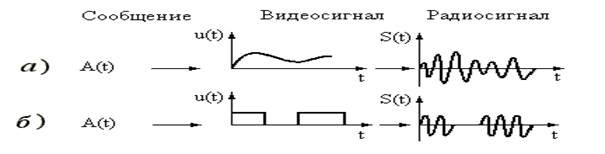
Рис.1.2
На приемной стороне производится обратное преобразование сигнала в сообщение, но теперь уже в качестве оконечного абонентского устройства используется телефон или громкоговоритель, превращающий электрические колебания в звуковые.
При передаче дискретных сообщений, которые широко используются в телеграфии и вычислительной технике, в качестве преобразующих оконечных абонентских устройств применяются телеграфный или фототелеграфный аппараты. Сигнал в данном случае представляет собой также дискретную последовательность элементов. Так, если сообщением является текст, состоящий из букв, то сигналы будут представлять собой кодовые комбинации, соответствующие этим буквам. Подобно непрерывным сигналам дискретное сообщение может быть представлено как видео -, так и радиосигналом (рис.1.2,б). Обратное преобразование сигнала в сообщение осуществляется телеграфным аппаратом, который принятую комбинацию сигнала преобразует в отпечатанную на ленте букву.
Необходимо отметить, что не всегда дискретные сообщения преобразуются в дискретные сигналы, а непрерывные сообщения - в непрерывные сигналы. В зависимости от конкретных условий могут применяться любые варианты преобразования сообщений в сигналы.
Передаваемое сообщение лишь тогда несет информацию, когда отражает случайное событие. Поэтому и сигнал, отражающий сообщение, носит случайный характер. Сделанное замечание имеет существенное значение в теории передачи сообщений. Дело в том, что в процессе передачи на сигнал действуют различного рода помехи, которое также носят случайный характер. А раз так, то принятое сообщение не в полной мере будет соответствовать переданному. Степень соответствия принятого сообщения переданному характеризует достоверность передачи. Понятно, что для ее повышения необходимо принимать специальные меры, по возможности исключающие действие помех. Для этого нужно четко знать, какие параметры сигнала являются основными и какой функцией можно описать информационный сигнал, который сам носит случайный характер. Вот почему в теории связи главенствующую роль играют теория случайных процессов и теория вероятностей, базирующиесяна современной высшей математике.
Любой сигнал, представляющий собой изменяющуюся во времени величину, может быть описан некоторой функцией времени. Очень важно при описании сигнала выделить те его показатели, которые являются главными с точки зрения условий его передачи. В теории связи такими главными показателями сигнала приняты следующие его параметры:
- длительность сигнала Тс;
- динамический диапазон сигнала Dс;
- ширина спектра сигнала Fс.
Длительность сигнала Тс определяет интервал времени существования сигнала, а значит, и время занятости канала передачи системы связи.
Динамический диапазон Dс определяется отношением наибольшей мощности сигнала к наименьшей. Он измеряется логарифмической мерой и выражается в децибелах (дБ). Динамический диапазон речи диктора равен около 30 дБ, а оркестра - около 70 дБ.
Наименьшая мощность сигнала Pcmin выбирается такой, чтобы она несколько превышала мощность помех Pп. На практике широко используется такой показатель, как отношение мощностей сигнала и помехи. Логарифм этого отношения называют превышением сигнала над помехой или кратко - отношением сигнал/помеха.
Динамический диапазон сигнала определятся формулой
Dс=log Pc/Pп .
Ширина спектра сигнала Fс характеризует скорость изменения сигнала на интервале его существования. Ширина спектра различных сигналов отличается весьма существенно. Некоторые сигналы имеют бесконечный спектр. На практике ширину спектра любого сигнала ограничивают полосой частот, в которой сосредоточена его основная энергия.
Этот факт является очень важным, поскольку полоса пропускания частот различных каналов связи существенно зависит от типа используемой аппаратуры и линий связи. Поэтому не всякий сигнал можно передавать по любому каналу связи. Следовательно, ограничение спектра сигнала технически выгодно.
Главным критерием при ограничении ширины спектра являются допустимые искажения сигнала. Покажем это на примере речевого сигнала. Из акустики известно, что спектр речи занимает полосу от нескольких десятков герц до 16 кГц. Основная же энергия этого сигнала распределена в пределах от 200-300 Гц до 3-4 кГц. При определении допустимых ограничений спектра речи в телефонии ставят два условия: во-первых, речь должна иметь высокую разборчивость; во-вторых, она должна быть естественной настолько, чтобы корреспонденты могли узнавать друг друга по голосу. Эксперимент показал что этим условиям удовлетворяет спектр речевого сигнала с полосой 300-3400 Гц. Типовой канал передачи с эффективно передаваемой полосой частот 300-3400 Гц называется каналом тональной частоты или каналом ТЧ. Этот канал является в системах связи основным.
Ширина спектра телеграфного сигнала зависит от скорости его передачи  , которая оценивается количеством элементарных импульсов, передаваемых в 1 секунду. За единицу скорости передачи принят один Бод. Обычно при вычислении ширины спектра телеграфного сигнала пользуются соотношением Fс
, которая оценивается количеством элементарных импульсов, передаваемых в 1 секунду. За единицу скорости передачи принят один Бод. Обычно при вычислении ширины спектра телеграфного сигнала пользуются соотношением Fс 
 . Так, при типовой скорости передачи =100 Бод, ширина спектра телеграфного сигнала Fc = 150 Гц.
. Так, при типовой скорости передачи =100 Бод, ширина спектра телеграфного сигнала Fc = 150 Гц.
Таким образом, рассмотрение основных параметров сигналов Тс, Dс и Fс позволяет любой сигнал представить геометрически в виде объема сигнала Vc = Тc Dc Fc (рис.1.3).
 |
Рис. 1.3
Подобно сигналу, канал связи также можно описать тремя параметрами Тк, Dк, Fк и емкостью канала Vк = Тк Dк Fк. Однако эти параметры могут быть как постоянными, так и переменными. Отсюда различают каналы связи с постоянными и переменными параметрами. К каналам связи с постоянными параметрами относятся проводные каналы передачи и некоторые каналы радиосвязи ультракоротковолнового диапазона. К каналам связи с переменными параметрами относятся практически все каналы радиосвязи. Это вызвано тем, что область свободного пространства, в котором распространяются электромагнитные волны, меняет свои показатели под действием внешних условий. Поэтому сигнал на выходе канала радиосвязи все время случайным образом изменяется по уровню в широких пределах. Отсюда следует, что канал радиосвязи находится в более трудных условиях по отношению к каналу проводной связи и такой показатель, как достоверность передачи у канала радиосвязи хуже [1,7].
1.2. НЕПРЕРЫВНЫЕ СИГНАЛЫ
Простейшим непрерывным сигналом можно считать колебание синусоидальной формы  Параметрами этого колебания являются амплитуда U, частота f и начальная фаза
Параметрами этого колебания являются амплитуда U, частота f и начальная фаза  .
.
Однако реальные непрерывные сигналы, которые являются результатом преобразования, например, речевых сообщений, представляют собой сигналы сложной формы. Эти сигналы содержат большое число составляющих в виде простейших синусоидальных колебаний, каждое из которых имеет свою амплитуду, частоту и начальную фазу.
Для каждого звука характерна своя форма сигнала. Амплитуда определяет громкость звука, а частота - его тон. Из рассмотрения эпюр сигналов (рис. 1.4), отображающих звук "У" и звук "Ш", видно, что звук "У" должен быть более громким и звучать ниже по частоте, чем звук "Ш".
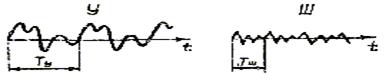
Рис.1.4
Гласные звуки более громкие и низкочастотные, чем согласные звуки. Каждый звук речи имеет свое типизированное начертание, которое называется фонемой. Эпюры на интервале Т (рис. 1.4.) -это и есть фонемы звуков "У" и "Ш". В звуке от 10 до 30 повторяющихся фонем. Минимальная длительность звука 20 мс, а максимальная - 350 мс. Самый длинный звук "А", самый короткий звук "П".
В русском языке насчитывается 40-41 фонема, что превышает количество букв в алфавите. Это объясняется тем, что некоторые буквы соответствуют двум звукам.
Сложная форма фонем указывает на то, что звуки - это не простые синусоидальные колебания, а их совокупность в определенном сочетании. Любой звук речи состоит из суммы гармонических колебаний, которые образуют определенный спектр частот. Подобно тому, как каждая фонема имеет свое начертание, так и спектр каждого звука чисто индивидуален. Эта индивидуальность выражается в специфической концентрации энергии в области определенных частот, которые в спектре звука называются формантами (рис.1.5).
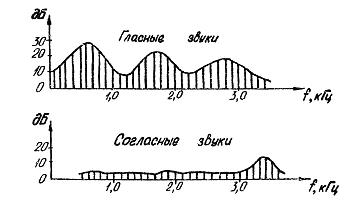
Рис. 1.5
Число формант у различных звуков колеблется от одной до пяти. У гласных звуков чаще всего наиболее выражены три форманты, а у согласных - одна. По положению формант на частотной оси и по их интенсивности можно опознать, какому звуку они соответствуют. В целом же существует однозначная взаимосвязь между временным начертанием фонемы и частотным представлением форманты для каждого звука речи.
Если усреднить форманты всех звуков, то они воссоздадут спектр речи (рис.1.6).
По существу спектр речи представляет собой зависимость средней за длительное время мощности речи от частоты.
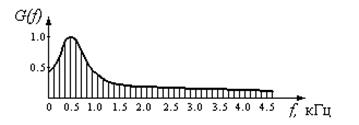
Рис.1.6
Естественная речь занимает диапазон частот от десятков герц до более, чем 10 килогерц. Однако энергия речи в этом диапазоне распределена неравномерно. Наибольшая ее концентрация приходится на полосу 200-600 Гц, но этого диапазона недостаточно для воспроизведения разборчивости и естественности звучания речи.
Уже отмечалось, что для восстановления высокой разборчивости и натуральности звучания речи ширина ее спектра может быть ограничена полосой канала ТЧ, равной 0,3-3,4кГц. Это было установлено артикуляционным методом, при котором разборчивость речи определяется путем вычисления отношения правильно принятых элементов речи к их общему числу переданных по каналу связи с изменяемой полосой пропускания.
Для техники связи важное значение имеют такие характеристики непрерывных сигналов, как средняя мощность, динамический диапазон и энергетический спектр.
Однако при построении систем связи необходимо учитывать также и характеристики слуха человека. Слуховой аппарат способен воспринимать звуковые колебания с частотами от 16 до 20000 Гц. Острота слуха зависит от частоты звуков. Ухо наиболее чувствительно к частотам 2000-3000 Гц. Зависимость чувствительности уха от частоты называется порогом слышимости и выражается в децибелах. Усредненная для многих людей кривая порога слышимости  показана на рис.1.7. С увеличением интенсивности звука колебания могут восприниматься как болевые ощущения. Зависимость величины давления, вызывающего болевые ощущения, от частоты называется порогом болевого ощущения (рис. 1.7, кривая
показана на рис.1.7. С увеличением интенсивности звука колебания могут восприниматься как болевые ощущения. Зависимость величины давления, вызывающего болевые ощущения, от частоты называется порогом болевого ощущения (рис. 1.7, кривая  ). Этот порог равен примерно 130 дБ. Напомним, что динамический диапазон речи диктора составляет около 30 дБ, а оркестра - около 70 дБ.
). Этот порог равен примерно 130 дБ. Напомним, что динамический диапазон речи диктора составляет около 30 дБ, а оркестра - около 70 дБ.
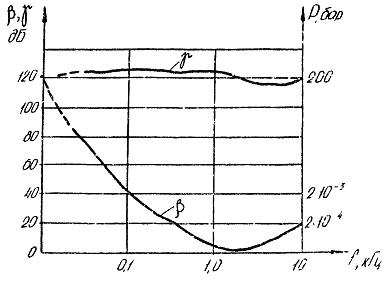
Рис. 1.7
Мерой громкости звука является уровень громкости. Звуковые колебания различных частот при одинаковойих интенсивности воспринимаются ухом как звуки разной громкости. Например, при одинаковой интенсивности колебание частоты 100 Гц будет находиться на пороге слышимости, а колебание частота 1000 Гц будет слышно громко,
Свойство уха изменять порог слышимости, т.е. приспосабливаться к громкости звука, называется адаптацией слуха. Этот процесс требует 3-5 секунд. Если на ухо действуют два звука разной громкости, то оно воспринимает не два, а один более громкий звук. Это явление называется маскировкой звука.
Помимо частотной зависимости органы слуха обладают некоторыми временными свойствами. Так, ухо способно воспринимать слитно лишь те звуки, интервал между которыми не более 30-50 мс.
Применительно к речевым сигналам на практике широко используется так называемая компрессия. Основной целью компрессии речевого сигнала является повышение пропускной способности канала связи при сохранении высокой достоверности передачи речевого сообщения. Компрессия - это такое преобразование речевого сигнала, в результате которого сжимается один или все его параметры. К этим параметрам относятся динамический диапазон (амплитуда) Dс , полоса частот (частота) Fс и время существования речевого сигнала Тс. В связи с этим различают амплитудную, частотную и временную компрессию. При этих видах компрессии речевой сигнал несет явные признаки речи. Фактически здесь компрессия сводится к трансформации речевого сигнала по параметрам Dс, Fc и Тc.
Кроме того, существует еще один вид компрессии, основанный на функциональном преобразовании речи. В таком сигнале явные признаки речи в канале связи отсутствуют. Формирование сигнала и его прием осуществляется устройствами, которые называются вокодерами. Их принцип действия основан на замене мгновенных (быстрых) параметров речевого сигнала его медленно меняющимися во времени информационными параметрами. Для передачи такого сигнала требуется более узкая, иногда в десятки раз, полоса, чем полоса канала ТЧ. Применение вокодеров позволяет более эффективно использовать канал связи.
1.3. ДИСКРЕТНЫЕ СИГНАЛЫ
Дискретные сигналы, как правило, формируются на основе дискретных сообщений. Вместе с тем часто прибегают к преобразованию непрерывного сообщения в дискретный сигнал. Этот вопрос будет рассмотрен в параграфе 1.6.
К дискретным сигналам относятся телеграфные сигналы, сигналы передачи данных для ЭВМ и др. Дискретные сигналы обычно представляют собой импульсные последовательности с определенной длительностью импульсов (рис. 1.8,а).
Период следования импульсов Тм определяет постоянную составляющую импульса (рис.1.8,б) и частоты его гармонических составляющих (рис.1.8,в). Известно [2,4], что для последовательности импульсов, приведенной на рис.1.8,а, будет иметь место множеств гармонических составляющих (гармоник) нечетного порядка – Fм, 3Fм, 5Fм и т.д. Частота первой (основной) гармоники (частота манипуляции) определяется из выражения Fм=  , где Тм - период следования импульсов. Постоянная составляющая и нечетные гармоники, убывающие по амплитуде с ростом номера гармоники, образуют спектр импульсной последовательности (рис.1.9).
, где Тм - период следования импульсов. Постоянная составляющая и нечетные гармоники, убывающие по амплитуде с ростом номера гармоники, образуют спектр импульсной последовательности (рис.1.9).
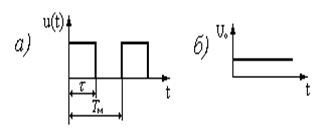
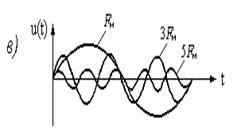
Рис.1.8
При этом, чем короче импульс, т.е. чем меньше  , тем шире спектр частот дискретного сигнала.
, тем шире спектр частот дискретного сигнала.
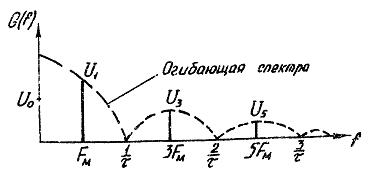
Рис. 1.9
Для того, чтобы восстановить прямоугольную форму дискретного сигнала, необходимо сложить все гармоники и постоянную составляющую импульса. Ранее уже отмечалось, что канал связи имеет ограниченную полосу пропускания. Значит, на приемной стороне не все гармоники будут приняты, а это приведет к искажению формы телеграфного сигнала.
В телеграфных каналах связи полосу пропускания рассчитывают из условия  F=
F=  , где
, где  - длительность импульса. Этого оказывается достаточно, чтобы по принятому сигналу восстановить передаваемое сообщение. В этой полосе сосредоточенно 90 0/0 энергии сигнала.
- длительность импульса. Этого оказывается достаточно, чтобы по принятому сигналу восстановить передаваемое сообщение. В этой полосе сосредоточенно 90 0/0 энергии сигнала.
Телеграфные сигналы обычно представляются в виде кодовых групп.
К основным методам телеграфной связи относится телеграфирование постоянным током и телеграфирование переменным током.
Информация о передаваемом сообщении может быть заложена в изменениях амплитуды или полярности кодовых импульсов постоянного тока, либо в изменениях амплитуды, частоты или фазы переменного тока.
В настоящее время наибольшее применение получил двоичный код, при котором амплитуда кодовых импульсов имеет лишь два фиксированных значения: 1 и 0. Сигналы такого вида можно передавать лишь на небольшие расстояния, а излучать в свободное пространство вообще нельзя из-за их сильного затухания. Поэтому как в проводных системах связи, так и в системах радиосвязи исходный спектр сигнала необходимо перенести в область более высоких частот. Эта операция преобразования низкочастотного сигнала (видеосигнала) в высокочастотный сигнал (радиосигнал) называется модуляцией.
Вопросы кодирования и модуляции сигналов излагаются соответственно в параграфах 1.4. и 1.5.
Таким образом, превращение дискретного сообщения в сигнал состоит из трех операций: преобразования, кодирования и модуляции.
Это справедливо для любого вида сообщений. Просто в случае непрерывных сигналов операция кодирования может осуществляться автоматически в устройстве преобразования сообщения в первичный электрический сигнал. Действительно, фонема звука - это уже закодированный сигнал, форма которого отличается от всех других фонем. А вот для дискретных сообщений нужно применять специальные кодирующие устройства (кодеры). При кодировании происходит процесс преобразования элементов сообщения в соответствующие им кодовые комбинации. Устройство, преобразующее кодовые комбинации в высокочастотный модулированный сигнал, называется модулятором.
На приемной стороне восстановление переданного сообщения осуществляется в обратном порядке. Сначала производится процесс демодуляции высокочастотных сигналов в демодуляторе, при котором выделяются кодовые сигналы. Затем осуществляется процесс декодирования этих сигналов в декодере и преобразования кодовых комбинаций в элементы сообщения.
Функциональная схема системы передачи дискретных сообщений приведена на рис. 1.10.
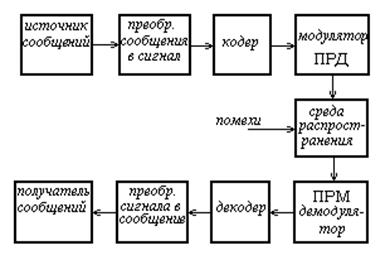
Рис.1.10
1.4. КОДИРОВАНИЕ СИГНАЛОВ
Остановимся теперь кратко на кодировании дискретных сообщений.
Операция кодирования состоит в преобразовании сообщения в код. Основным требованием к коду является его полная обратимость. Это достигается за счет обеспечения однозначного соответствия между элементами сообщения и символами кода.
В качестве элементов дискретного сообщения могут выступать буквы или цифры, образующие алфавит сообщения. При кодировании каждому элементу приписывается конкретная комбинация кодовых символов, состоящих либо из точек и тире, либо из нулей и единиц и т.д. Например, в коде Морзе букве "а" соответствует комбинация - "точна" и "тире".
Совокупность кодовых символов образует кодовые комбинации, а последние в свою очередь образуют код. Количество кодовых комбинаций соответствует алфавиту кодируемых сообщений. Количество кодовых символов m называется основанием кода. Число разрядов n, которое образует кодовую комбинацию, называется значностью кода. Длина кодовой комбинации определяется значностью кода. Количество кодовых комбинаций находится из выражения N = mn .
На практике могут применяться двоичные (m=2) и недвоичные коды (m>2). В настоящее время наибольшее применение получил двоичный код, при котором амплитуда кодовых импульсов имеет лишь два значения (1 или 0, токовая или бестоковая посылка).
Применительно к русскому алфавиту, состоящему из 32 букв, целесообразно применить пятизначный двоичный код (n=5, m=2). В этом случае количество кодовых комбинаций будет равно N = mn = 25 = 32, т.е. количеству букв.
У неравномерных кодов комбинации содержат неодинаковое количество символов, а значит, имеют неодинаковую длину.
Для повышения помехоустойчивости связи могут применяться так называемые корректирующие коды. Они позволяют обнаружить, а при определенных условиях и исправить искаженные символы сигнала.
Устройство, которое осуществляет кодирование сообщения и преобразует его в электрический сигнал или видеосигнал (рис.1.11.) называется кодером, а устройство, выполняющее обратное действие - декодирование, называется декодером. В системах связи кодер и декодер часто объединяется в одно устройство, которое называется кодеком. Первичные сигналы (видеосигналы) непосредственно в канал связи не передаются.

Рис.1.11
Ранее уже отмечалось, что передача сообщений по каналу связи осуществляется с помощью какого-либо физического процесса, который является материальным переносчиком информации.
При этом сигналом является не сам переносчик, а изменения его отдельных параметров в соответствии с передаваемым сообщением, преобразованным в видеосигнал.
Для того чтобы сформировать сигнал, который должен передаваться по каналу связи, необходимо осуществить операцию, называемую модуляцией.
1.5. МОДУЛИРОВАННЫЕ СИГНАЛЫ
В системах связи в качестве переносчика могут использоваться синусоидальные колебания высокой частоты, периодические последовательности импульсов и даже некоторые случайные процессы.
Модуляция гармонического высокочастотного сигнала.
Независимо от вида сообщения, любой сигнал, поступающий в канал связи, получается путем модуляции. Для пояснения процесса модуляции выберем в качестве переносчика колебание высокой частоты вида
 (1.1)
(1.1)
где  - амплитуда;
- амплитуда;
 - несущая частота;
- несущая частота;
 - начальная фаза,
- начальная фаза,
Для немодулированного колебания амплитуда, частота и фаза постоянны. Они известны заранее, поэтому немодулированный переносчик не несет информации.
Модуляция заключается в том, что один из параметров переносчика – амплитуда , частота или фаза изменяется под действием первичного сигнала  , однозначно отображающего сообщение. Каждый из этих параметров можно промодулировать и получить соответственно амплитудную модуляцию (AM), частотную модуляцию (ЧМ) и фазовую модуляцию (ФМ). При этом модулируемый параметр будет иметь приращение, пропорциональное величине первичного сигнала
, однозначно отображающего сообщение. Каждый из этих параметров можно промодулировать и получить соответственно амплитудную модуляцию (AM), частотную модуляцию (ЧМ) и фазовую модуляцию (ФМ). При этом модулируемый параметр будет иметь приращение, пропорциональное величине первичного сигнала  :
:
при AM  ; (1.2)
; (1.2)
при ЧМ  ; (1.3)
; (1.3)
при ФМ  . (1.4)
. (1.4)
Независимо от вида модуляции процесс модуляции можно представить в виде произведения несущего колебания f ( t ) на модулирующую функцию, представляющую собой первичный сигнал u(t), т.е.  .
.
Амплитудная модуляция
При амплитудной модуляций изменяется амплитуда высокочастотного несущего колебания (1.1) пропорционально u(t).
С учетом (1.2), вынося U0 зa скобки, выражение (1.1) можно представить в следующем виде:
 (1.5)
(1.5)
Выражение (1.5) описывает амплитудно-модулированный (AM) сигнал. Если до модуляции амплитуда колебаний (1.1) была постоянна, то теперь она будет изменяться по закону низкочастотного первичного сигнала u(t). Поэтому сигнал u(t) называют модулирующей функцией. Она может быть непрерывной или дискретной. Для непрерывного сообщения функции u(t), f ( t ) и u АМ ( t ) приведены на рис. 1.12, а.
Для дискретного сообщения, если оно закодировано двоичным кодом, модулирующая функция u(t) будет принимать только два значения: 1 или 0. В этом случае амплитудную модуляцию называют амплитудной манипуляцией (рис. 1.12, б).
Модуляция осуществляется в устройстве, называемом амплитудным модулятором. При подаче на один его вход напряжения несущей частоты, а на другой вход - низкочастотного первичного сигнала u(t), на выходе модулятора образуется амплитудно-модулированный или амплитудно-манипулированный сигнал.
Амплитудно-манипулированные сигналы чаще всего применяются в каналах слухового телеграфирования. Поэтому амплитудную манипуляцию называют амплитудным телеграфированием (AT). Режим AT относится к видам работы с пассивной паузой и обладает низкой помехоустойчивостью. В связи с этим его не применяют в каналах приема на автоматическую регистрирующую аппаратуру. В то же время режим AT весьма эффективен в слуховых каналах приема, использующих код Морзе. В силу физиологических особенностей слухового аппарата человека прием телеграфных сигналов оператором возможен даже в тех случаях, когда уровень сигнала соизмерим с уровнем помех или даже ниже его. Поэтому режим AT применяется в самых современных системах связи.
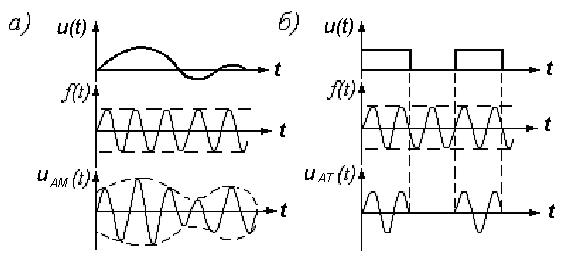
Рис.1.12
Перейдем теперь к рассмотрению спектра амплитудно-модулированного непрерывного сигнала. Для краткости в дальнейшем будем называть его спектром AM сигнала. Ранее уже отмечалось, что всякое колебание несинусоидальной формы имеет сложный спектр, поскольку содержит множество гармоник. Сигнал АМ является сигналом сложной формы, что видно из рис.1.12,а. Для того чтобы разобраться, что же собой представляет спектр AM сигнала, максимально упростим задачу. Начнем с простейшего случая, когда модулирующая функция u(t) представляет собой косинусоидальное колебание низкой частоты  , которое можно записать в виде
, которое можно записать в виде  .
.
Подставляя это выражение в (1.5) и полагая начальную фазу  , получим следующую формулу для AM сигнала
, получим следующую формулу для AM сигнала
 , (1.6)
, (1.6)
где  - коэффициент глубины модуляции;
- коэффициент глубины модуляции;
 - частота несущей;
- частота несущей;
 - частота модулирующего сигнала u ( t ) ,
- частота модулирующего сигнала u ( t ) ,
Для непрерывных сигналов выбирают  , чтобы исключить специфические искажения - перемодуляцию. На практике у речевого сигнала величина m=0,3-0,5. В случае же дискретных сигналов при передаче посылки (1) величина
, чтобы исключить специфические искажения - перемодуляцию. На практике у речевого сигнала величина m=0,3-0,5. В случае же дискретных сигналов при передаче посылки (1) величина  , а при передаче паузы (0) величина
, а при передаче паузы (0) величина  . Но здесь модулирующая функция u ( t ) будет более сложной, а не синусоидальной.
. Но здесь модулирующая функция u ( t ) будет более сложной, а не синусоидальной.
Вернемся к случаю, когда  . После соответствующих перемножений формула (1.6) преобразуется к следующему виду
. После соответствующих перемножений формула (1.6) преобразуется к следующему виду
 . (1.7)
. (1.7)
Из этой формулы видно, что такой AM сигнал содержит три составляющих: колебание несущей частоты  и две боковые частоты:
и две боковые частоты:  и
и  . Это и есть спектр AM сигнала (рис.1.13,а).
. Это и есть спектр AM сигнала (рис.1.13,а).
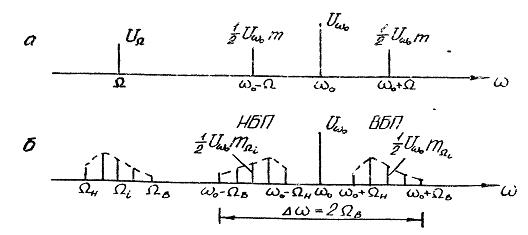
Рис. 1.13
Амплитуды боковых частот одинаковы и пропорциональны коэффициенту глубины модуляции m .
Мощность AM сигнала зависит от величины m . При этом мощность несущей частоты, равная  , неизменна, а мощность каждой боковой частоты равна
, неизменна, а мощность каждой боковой частоты равна  .
.
Интересно отметить, что боковые частоты и представляют собой зеркальное отображение друг друга по отношению к несущей частоте . Они несут одну и ту же информацию о передаваемом сигнале. Несущая же частота вообще не несет никакой информации, хотя и потребляет 50 0/0 мощности. То, что именно боковые составляющие несут информацию , подтверждает следующий факт. При отсутствии модулирующего сигнала m=0 и боковые составляющие  исчезают, а остается только колебание несущей частоты . Это и есть исходный материальный носитель, у которого параметры
исчезают, а остается только колебание несущей частоты . Это и есть исходный материальный носитель, у которого параметры  , и
, и  постоянны, а значит, не несут никакой информации. Этот принцип сохраняется и для тек случаев, когда модулирующая функция имеет любую форму. При рассмотрении непрерывных сигналов было установлено, что речевой сигнал представляет собой сложную модулирующую функцию. Это видно из начертания фонем и спектрального состава формант. Даже при ограничении полосы спектра речи рамками канала ТЧ, модулирующая функция будет содержать множество колебаний с частотами от
постоянны, а значит, не несут никакой информации. Этот принцип сохраняется и для тек случаев, когда модулирующая функция имеет любую форму. При рассмотрении непрерывных сигналов было установлено, что речевой сигнал представляет собой сложную модулирующую функцию. Это видно из начертания фонем и спектрального состава формант. Даже при ограничении полосы спектра речи рамками канала ТЧ, модулирующая функция будет содержать множество колебаний с частотами от  300 Гц до
300 Гц до  3400 Гц (
3400 Гц (  и
и  - соответственно нижняя и верхняя частота канала ТЧ). Даже не производя математических выкладок, можно увидеть, что, подставляя в формулу (1.5) модулирующую функцию , содержащую множество колебаний в диапазоне частот от до , в результате будет получено то же самое колебание несущей частоты
- соответственно нижняя и верхняя частота канала ТЧ). Даже не производя математических выкладок, можно увидеть, что, подставляя в формулу (1.5) модулирующую функцию , содержащую множество колебаний в диапазоне частот от до , в результате будет получено то же самое колебание несущей частоты  и две боковые полосы частот вида
и две боковые полосы частот вида  и
и  . Колебания
. Колебания  называют верхней боковой полосой(ВБП), а колебания
называют верхней боковой полосой(ВБП), а колебания  - нижней боковой полосой(НБП). Таким образом, спектр непрерывного AM сигнала в общем случае состоит из двух боковых полос, несущих одну и ту же информацию, которые расположены симметрично по отношению к несущей (рис.1.1З,б).
- нижней боковой полосой(НБП). Таким образом, спектр непрерывного AM сигнала в общем случае состоит из двух боковых полос, несущих одну и ту же информацию, которые расположены симметрично по отношению к несущей (рис.1.1З,б).
Анализ боковых полос показывает, что каждая из них в отдельности представляет собой колебание с амплитудно-частотной модуляцией (АМ-ЧМ), в то время как сигнал с двумя боковыми полосами – это колебание АМ.
Из рис.1.13,б видно, что полоса, занимаемая спектром непрерывного AM сигнала, равна  . Такой сигнал имеет ряд недостатков. Во-первых, в энергетическом отношении он нерационален, так как половина мощности здесь тратится на несущую, а оставшаяся мощность делится пополам между информационными боковыми полосами. Следовательно, мощность передатчика используется крайне неэффективно. Во-вторых, для передачи такого сигнала полосу пропускания канала связи нужно иметь в два раза больше по сравнению с необходимой полосой для передачи низкочастотного первичного сигнала, в рассматриваемом случае речевого сигнала. В-третьих, при передаче AM сигнала по каналу связи с переменными параметрами в случае замирания несущего колебания
. Такой сигнал имеет ряд недостатков. Во-первых, в энергетическом отношении он нерационален, так как половина мощности здесь тратится на несущую, а оставшаяся мощность делится пополам между информационными боковыми полосами. Следовательно, мощность передатчика используется крайне неэффективно. Во-вторых, для передачи такого сигнала полосу пропускания канала связи нужно иметь в два раза больше по сравнению с необходимой полосой для передачи низкочастотного первичного сигнала, в рассматриваемом случае речевого сигнала. В-третьих, при передаче AM сигнала по каналу связи с переменными параметрами в случае замирания несущего колебания  может произойти полное нарушение связи.
может произойти полное нарушение связи.
Перечисленные недостатки резко ограничили применение этого вида модуляции в системах связи. Однако, именно амплитудная модуляция породила балансную и однополосную модуляцию.
Балансная модуляция (БМ) отличается отAM отсутствием несущего колебания . В этом случае вся мощность передатчика делится поровну между верхней и нижней информационными полосами, что существенно повышает помехоустойчивость связи.
При однополосной модуляции (ОМ) подавляется несущая и одна боковая полоса. Это позволяет весьма экономно использовать отводимую для связи полосу частот, так как ширина спектра однополосного сигнала (ВБП или НБП) равна ширине спектра модулирующей функции  , т.е. речевого сигнала. Теперь вся мощность передатчика тратится только на полезный сигнал. Кроме того, однополосный сигнал более устойчив к замираниям, так как в нем отсутствует несущее колебание с частотой
, т.е. речевого сигнала. Теперь вся мощность передатчика тратится только на полезный сигнал. Кроме того, однополосный сигнал более устойчив к замираниям, так как в нем отсутствует несущее колебание с частотой  . Все это дает возможность в существенной мере улучшить такие показатели системы связи, как помехоустойчивость и достоверность передачи. Вот почему однополосные сигналы находят самое широкое применение в системах проводной и радиосвязи.
. Все это дает возможность в существенной мере улучшить такие показатели системы связи, как помехоустойчивость и достоверность передачи. Вот почему однополосные сигналы находят самое широкое применение в системах проводной и радиосвязи.
Тем не менее следует отметить, что сигнал ОМ – это колебания АМ-ЧМ и для восстановление его на приемной стороне на демодулятор необходимо подавать колебание несущей частоты. А это требует дополнительного усложнения аппаратуры.
Теперь перейдем к рассмотрению вопроса о спектрах дискретных амплитудно-манипулированных сигналов или сигналов амплитудного телеграфирования (AT). При AT возможна работа незатухающими и тональными колебаниями. Случай AT незатухающими колебаниями показан на рис.1.12,б. Остановимся только на этом режиме работы поскольку он является основным в дискретных системах связи. В параграфе 1.3 при рассмотрении последовательности импульсов (рис.1.8,а) было показано, что их спектр состоит из нечетных гармонических составляющих FМ,3 FМ, 5FМ и т.д. Сигнал же амплитудной телеграфии - это высокочастотное колебание с частотой  . Поскольку амплитудная манипуляция есть процесс перемножения колебаний
. Поскольку амплитудная манипуляция есть процесс перемножения колебаний  и FМ, 3 FМ, 5 FМ и т.д., то результирующий сигнал будет представлять собой несущее колебание и ряд боковых составляющих вида
и FМ, 3 FМ, 5 FМ и т.д., то результирующий сигнал будет представлять собой несущее колебание и ряд боковых составляющих вида  FМ, 3FМ и т.д., интенсивность которых быстро убывает с ростом их порядкового номера. На практике полосу спектра сигнала AT ограничивают, исходя из соотношения
FМ, 3FМ и т.д., интенсивность которых быстро убывает с ростом их порядкового номера. На практике полосу спектра сигнала AT ограничивают, исходя из соотношения  , где
, где  FМ - скорость телеграфирования. Этой полосы вполне достаточно, чтобы восстановить на приемной стороне передаваемое дискретное сообщение.
FМ - скорость телеграфирования. Этой полосы вполне достаточно, чтобы восстановить на приемной стороне передаваемое дискретное сообщение.
Частотная модуляция
При частотной модуляции (ЧМ) изменяется частота высокочастотного несущего колебания (1.1) пропорционально . Особенностью частотной модуляций является то, что амплитуда этого колебания остается неизменной во времени. Поэтому формулу для высокочастотного колебания (1.1) с постоянной амплитудой, но переменной частотой теперь можно представить следующим выражением:
 (1.8)
(1.8)
где  - мгновенная фаза.
- мгновенная фаза.
Дело в том, что фаза и частота колебания взаимосвязаны между собой . Для синусоидального колебания  , т.е. фаза растет пропорционально времени. Если колебание представить вектором, то это значит, что он вращается равномерно с постоянной угловой скоростью
, т.е. фаза растет пропорционально времени. Если колебание представить вектором, то это значит, что он вращается равномерно с постоянной угловой скоростью  . В случае же несинусоидального колебания частота непостоянна и вектор вращается с переменной скоростью
. В случае же несинусоидального колебания частота непостоянна и вектор вращается с переменной скоростью  . Мгновенное значение частоты определяется как производная по времени от фазы, т.е.
. Мгновенное значение частоты определяется как производная по времени от фазы, т.е.  . Из этого выражения можно найти переменную фазу колебания. Она равна
. Из этого выражения можно найти переменную фазу колебания. Она равна  . .Если подставить это выражение в формулу (1.8), то получим
. .Если подставить это выражение в формулу (1.8), то получим  . Здесь
. Здесь  определяется выражением (1.3). Подставляя значение
определяется выражением (1.3). Подставляя значение  под знак интеграла, получим
под знак интеграла, получим
 , (1.9)
, (1.9)
где  - частотное отклонение от или девиация частоты.
- частотное отклонение от или девиация частоты.
Выражение (1.9) описывает частотно-модулированный (ЧМ) сигнал. Если до модуляции частота колебания (1.1) была постоянна, то теперь она будет изменяться по закону низкочастотного первичного сигнала или, что тоже самое, модулирующей функции . Она может быть как непрерывной, так и дискретной.
Для непрерывного сообщения функции ,  и
и  приведенына рис.1.14, а.
приведенына рис.1.14, а.
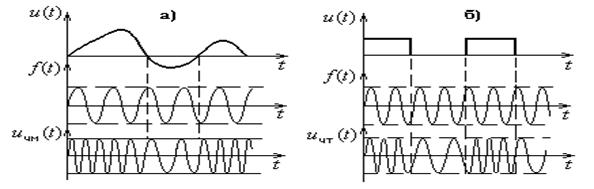
Рис.1.14
Для дискретного сообщения, закодированного двоичным кодом, модулирующая функция будет равна либо 1, либо 0. В этом случае частотную модуляцию называют частотной манипуляцией (рис.1,14,б).
Модуляция несущей частоты производится в устройстве, которое называется частотным модулятором. В состав частотного модулятора входят контур, параметры, а значит, и частота которого меняются под воздействием модулирующего сигнала.
ЧМ сигналы находят широкое применение в каналах телеграфирования, поэтому частотную манипуляцию называют частотным телеграфированием (ЧТ). Режим ЧТ относится к видам работы с активной паузой и обладает повышенной помехоустойчивостью по отношению к AT.
Остановимся несколько подробней на рассмотрение частотного телеграфирования, поскольку оно находит широкое применение в различных системах проводной и радиосвязи.
Принцип ЧТ состоит в том, что при передаче токовой посылки передается колебание с частотой  , а при передачи бестоковой посылки - колебание с частотой
, а при передачи бестоковой посылки - колебание с частотой  . Согласно рекомендациям МККТТ принято, что
. Согласно рекомендациям МККТТ принято, что  >
>  [19].
[19].
В зависимости от вида кода различают:
- простые системы ЧТ, в которых применяется двоичный частотный код (m =2);
- система двойного частотного телеграфирования (ДЧТ) с основанием частотного кода m= 4;
- системы многопозиционного частотного телеграфирования (МЧТ) с основанием частотного кода m > 2.
Отсюда следует, что ДЧТ является частным случаем МЧТ. На практике наибольшее распространение получили системы связи ЧТ и ДЧТ.
Основными параметрами сигнала ЧТ (рис. 1.15) являются:
1. Среднее значение частоты, вокруг которой осуществляется манипуляция частот токовой посылки  и бестоковой посылки
и бестоковой посылки
 . (1.10)
. (1.10)
2. Разнос частот токовой и бестоковой посылки
 . (1.11)
. (1.11)
3. Девиация частоты, характеризующая отклонение частоты от ее среднего значения
 (1.12)
(1.12)
4. Индекс частотной манипуляции
 , (1.13)
, (1.13)
где  - частота манипуляции сигнала, Гц;
- частота манипуляции сигнала, Гц;
 - скорость телеграфирования, Бод.
- скорость телеграфирования, Бод.
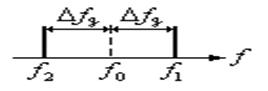
Рис. 1.15
Скорость передачи (телеграфирования) определяет основную частоту манипуляции или частоту следования импульсов (Рис.1.8,а) и связана с ней соотношением
 . (1.14)
. (1.14)
Рассмотрим теперь принцип ДЧТ. Он состоит в том, что один передатчик одновременно передает две различные информации двум корреспондентам. Для этого используют четыре различных частоты.
Если передачу посылки от телеграфного аппарата обозначит (1), а паузу - (0), то при одновременной работе двух аппаратов можно осуществись следующую группировку сигналов (табл.1.1) с точки зрения передачи в канал связи одной из частот.
Таблица 1.1
| 1 канал | 1 | 0 | 1 | 0 |
| 2 канал | 0 | 1 | 1 | 0 |
| Формируемые сигналы |

|
|

|

|
Отсюда следует, что одновременная двухканальная работа при ДЧТ достигается путем передачи в канал связи колебания только одной частоты, на которую расходуется вся мощность передатчика.
При независимой работе двух телеграфных аппаратов в канал связи вместо сигнала одной частоты нужно передавать одновременно сигналы двух частот. В этом случае мощность передатчика делится пополам между передаваемыми сигналами, что ведет к ухудшению такого показателя системы связи, как ее помехоустойчивость,
Нa рис. 1.16 показан сигнал ДЧТ. Из рисунка видно, что при ДЧТ индекс частотной манипуляции в три раза больше, чем при ЧТ.
Рис.1.16
Вернемся теперь к рассмотрению спектров ЧМ сигналов. Для непрерывного сигнала опять возьмем простейший случай, когда модулирующая функция  . Тогда формула (1.9) преобразуется к виду
. Тогда формула (1.9) преобразуется к виду
 (1.15)
(1.15)
где  ;
;
 - индекс частотной модуляции.
- индекс частотной модуляции.
Выражение для индекса частотной модуляции совпадает с формулой (1.13). Действительно,  , где
, где  - частота модуляции (манипуляции).
- частота модуляции (манипуляции).
Вычисление выражения (1.15) показывает, что теоретически спектр ЧМ сигнала бесконечен и состоит из колебаний вида  , где K = I, 2, 3 ... Практически же ширину этого спектра можно ограничите, так как с ростом К амплитуда колебаний быстро убывает. Установлено [2,5], что полоса спектра ЧМ сигнала в общем случае зависит как от девиации частоты
, где K = I, 2, 3 ... Практически же ширину этого спектра можно ограничите, так как с ростом К амплитуда колебаний быстро убывает. Установлено [2,5], что полоса спектра ЧМ сигнала в общем случае зависит как от девиации частоты  , так и от значения модулирующей частоты
, так и от значения модулирующей частоты  . Другими словами, ширина спектра зависит от величины
. Другими словами, ширина спектра зависит от величины  .При индексах частотной модуляции
.При индексах частотной модуляции 
 1 ширина спектра ЧМ сигнала такая же, как у AM сигнала, т.е. равна удвоенной частоте модуляции. Однако, с ростом величины mч ширина спектра ЧМ сигнала начинает возрастать и при
1 ширина спектра ЧМ сигнала такая же, как у AM сигнала, т.е. равна удвоенной частоте модуляции. Однако, с ростом величины mч ширина спектра ЧМ сигнала начинает возрастать и при  >> 1 она равна
>> 1 она равна  , т.е. удвоенной девиации частоты. В процессе модуляции мгновенная частота может принимать любое значение внутри интервала
, т.е. удвоенной девиации частоты. В процессе модуляции мгновенная частота может принимать любое значение внутри интервала  . Следует отметить, что величина
. Следует отметить, что величина  учитывает обе боковые полосы ЧМ сигнала, каждая из которых при больших значениях
учитывает обе боковые полосы ЧМ сигнала, каждая из которых при больших значениях  равна
равна  . Сама же величина
. Сама же величина  выбирается по нашему усмотрению при проектировании системы связи и является некоторой постоянной.
выбирается по нашему усмотрению при проектировании системы связи и является некоторой постоянной.
Перейдем к рассмотрению спектра ЧМ дискретного сигнала. В параграфе 1.3 было показано, что даже при передаче простой последовательности импульсов, спектр сигнала состоит из ряда нечетных гармоник 
 ,
,  и т.д., кратных основной частоте манипуляции
и т.д., кратных основной частоте манипуляции  .
.
Для того, чтобы найти спектр сигнала ЧТ, нужно в формулу (1.9) подставить аналитическое выражение, описывающее импульсный модулирующий сигнал. Опуская математические выкладки, отметим, что спектр такого сигнала состоит из несущей частоты и бесконечного числа частотных составляющих нижней и верхней боковых полос. Амплитуда частотных составляющих и ширина спектра главным образом определяются величиной индекса частотной манипуляции  и номером гармоники модулирующего сигнала.
и номером гармоники модулирующего сигнала.
При 
 спектры сигналов AT и ЧТ почти не отличаются. С ростом величины спектр сигнала ЧТ начинает расширяться.
спектры сигналов AT и ЧТ почти не отличаются. С ростом величины спектр сигнала ЧТ начинает расширяться.
На практике ширину спектра сигнала ЧТ рассчитывают по формуле
 . (1.16)
. (1.16)
Для любого вида ЧМ сигналов помехоустойчивость связи повышается с ростом величины , а это ведет к расширению спектра сигнала. Поэтому частотную модуляцию применяют, как правило, в широкополосных каналах связи.
Фазовая модуляция
При фазовой модуляции (ФМ) под действием модулирующего сигнала  изменяется фаза несущего колебания (1.1), а его амплитуда остается постоянной. Для ФМ сигнала формула (1.1), с учетом (1.4), преобразуется к виду
изменяется фаза несущего колебания (1.1), а его амплитуда остается постоянной. Для ФМ сигнала формула (1.1), с учетом (1.4), преобразуется к виду
 (1.17)
(1.17)
где  - индекс фазовой девиации.
- индекс фазовой девиации.
В формуле (1.17) начальная фаза  отброшена, таккакона является постоянной величиной. Как видно из формулы, модулирующая функция
отброшена, таккакона является постоянной величиной. Как видно из формулы, модулирующая функция  здесь входит под знак косинуса. Выражение (1.17) для ФМ сигнала и (1.9) для ЧМ сигнала отличаются только тем, что в первом случае под знаком косинуса находится сама модулирующая функция, а во втором случае - ее интеграл.
здесь входит под знак косинуса. Выражение (1.17) для ФМ сигнала и (1.9) для ЧМ сигнала отличаются только тем, что в первом случае под знаком косинуса находится сама модулирующая функция, а во втором случае - ее интеграл.
Для непрерывного ФМ сигнала ширина боковой полосы, по аналогии с ЧМ сигналом, находится как произведение индекса фазовой девиации на модулирующую частоту, т.е.  , а полная ширина спектра равна
, а полная ширина спектра равна  . Если для ЧМ сигнала ширина спектра не зависела от значения , то для ФМ сигнала она зависит от него. В этом и состоит различие спектров ФМ и ЧМ сигналов.
. Если для ЧМ сигнала ширина спектра не зависела от значения , то для ФМ сигнала она зависит от него. В этом и состоит различие спектров ФМ и ЧМ сигналов.
Фазовая модуляция не нашла практического применения для передачи непрерывных сообщений. Зато ее широко применяют при передаче дискретных сообщений.
При кодировании дискретных сообщений двоичным кодом (1,0) фазовую модуляцию называют фазовой манипуляцией. Поскольку фазовая манипуляция широко применяется в телеграфных и телекодовых каналах связи, она получила название фазового телеграфирования (ФТ),
Различают несколько способов фазового телеграфирования:
- однократное (ФТ);
- многократное (МФТ);
- относительное (ОФТ).
При ФТ фаза несущего колебания меняется скачком на 180° при переходе от посылки (1) к паузе (0), и наоборот (рис.1.17). Фазовую телеграфию называют режимом работы с активной паузой.
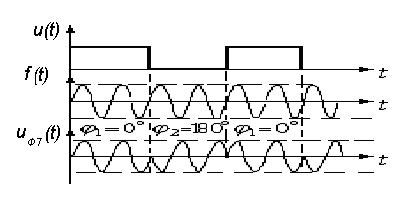
Рис.1.17
Сигналы МФТ используются тогда, когда по каналусвязи передаются одновременно n сообщений. Частным случаем МФТ являетсядвойное фазовое телеграфирование (ДФТ). Здесь есть прямая аналогия с сигналами двойного частотного телеграфирования (ДЧТ). Но там последовательно передавали одну из четырех частот (  или ), а при ДФТ передаются колебания одной и той же частоты, но с четырьмя различными фазами (
или ), а при ДФТ передаются колебания одной и той же частоты, но с четырьмя различными фазами (  или
или  ). Если нужно передавать n сообщений, то понадобится сформировать колебания с n - фазами. Эти фазы находятся по формуле
). Если нужно передавать n сообщений, то понадобится сформировать колебания с n - фазами. Эти фазы находятся по формуле  .
.
В чистом виде сигналы ФТ не применяются из-за явления так называемой "обратной работы". Дело в том, что в отличие от сигналов AT и ЧТ прием сигналов ФТ требует подачи на демодулятор опорного напряжения синхронного и синфазного с принимаемом высокочастотным сигналом. Если произойдет случайный скачок фазы у сигнала или опорного напряжения, то все посылки станут паузами, а паузы - посылками. Это и есть явление “обратной работы”. Для того чтобы избежать этого недостатка, отечествен-ным ученым Н.Т. Петровичем был предложен способ относительного фазового телеграфирования (ОФТ). Он предусматривает определенный алгоритм кодирования и декодированиясигналов, благодаря чему явление обратной работы исключается. По своимосновным параметрам сигналы ОФТ ничем не отличаются от сигналов ФТ.
Принцип ОФТ заключается в сравнении фаз несущего колебания n – й и предыдущий (n –1)–й посылок. В результате носителем информации является не фаза принимаемой посылки, а новый сигнал, полученный по определенному правилу при сравнению фаз последующей и предыдущей посылок. Как правило, этот сигнал формируется до фазового манипулятора, поэтому сигналы на его выходе по виду ничем не отличаются от сигналов ФТ.
При ОФТ в случае передачи бестоковой посылки фаза ее колебаний остается такой же, как и предыдущей посылки, а при передачи токовой посылки изменяется на 180°. В принципе, это правило можно изменить на противоположенное. Но независимо от правила перекодирования в начале сеанса связи нужно передавать вспомогательный сигнал для определения фазы колебаний первой посылки.
Алгоритм перекодирования сигнала на передающей стороне можно записать в виде
 (1.18)
(1.18)
где  - п-я посылка;
- п-я посылка;
 - (n –1)-я посылка;
- (n –1)-я посылка;
 - формируемая в результате перекодирования посылка.
- формируемая в результате перекодирования посылка.
Пользуясь (1.18), легко показать что исходная последовательность  =101101001 в результате перекодирования дает последовательность
=101101001 в результате перекодирования дает последовательность  =110110001. Эта операция иллюстрируется рис. 1.18. Технически перекодирование можно осуществить по схеме, приведенной на рис. 1.19. Посылки, поступающие на манипулятор фазы, одновременно задерживаются на время
=110110001. Эта операция иллюстрируется рис. 1.18. Технически перекодирование можно осуществить по схеме, приведенной на рис. 1.19. Посылки, поступающие на манипулятор фазы, одновременно задерживаются на время  в элементе задержки и подаются на сумматор по модулю два, где и происходит их перекодирование. В модуляторе фаза несущего колебания изменяется только при изменении полярности посылок.
в элементе задержки и подаются на сумматор по модулю два, где и происходит их перекодирование. В модуляторе фаза несущего колебания изменяется только при изменении полярности посылок.
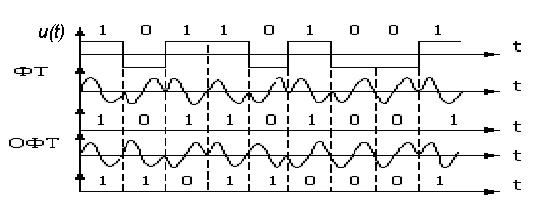
Рис.1.18
На приемной стороне для восстановления исходного сообщения необходимо произвести операцию декодирования по формуле
 (1.19)
(1.19)
Эту операцию можно реализовать, используя схему, приведенную на рис. 1.20.
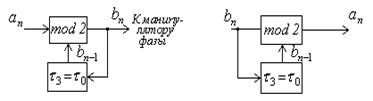
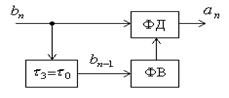
Рис.1.19 Рис.1.20 Рис.1.21
Нетрудно показать, что принятая в этом случае последовательность  будет преобразована в исходную последовательность 101101001.
будет преобразована в исходную последовательность 101101001.
На практике обработку принимаемого сигнала часто ведут не по низкой, а по высокой частоте. При этом посылки переменного тока поступают на входы фазового детектора и схемы задержки на время  , а с нее через фазовращатель ФВ – на другой вход ФД (рис. 1.21). В фазовом детекторе роль опорного напряжения для п-й посылки играет (п – 1)-я посылка. В результате сравнения последующей высокочастотной посылки с предыдущей формируется исходная кодовая комбинация.
, а с нее через фазовращатель ФВ – на другой вход ФД (рис. 1.21). В фазовом детекторе роль опорного напряжения для п-й посылки играет (п – 1)-я посылка. В результате сравнения последующей высокочастотной посылки с предыдущей формируется исходная кодовая комбинация.
Выбранные алгоритмы перекодирования и декодирования сигналов практически устраняют «обратную работу», характерную для ФТ. Изменение полярности посылок на входе сумматора по модулю два не изменяет полярности выходных сигналов, за исключением двух посылок, непосредственно примыкаемых к моменту скачка фазы.
Вид спектров сигнала ОФТ зависит от способа сравнения посылок на приемном конце, т.е. от того, каким способом обрабатывается принятый сигнал – путем сравнения полярностей или путем сравнения фаз. Способ сравнения фаз получил название ОФТ-1, а способ сравнения полярностей ОФТ-2. Что же касается ширины спектра сигналов ОФТ-1 и ОФТ-2, то они почти не отличаются от спектра сигналов ФТ.
При ОФТ, как при ФТ, возможна реализация многократного телеграфирования и, в частности, двукратного ОФТ (ДОФТ). Для этого необходимо на передающей стороне расщепить несущее колебание на два колебания со сдвигами фаз относительно исходного на  . На приемном конце эти колебания анализируются по способу сравнения фаз (ДОФТ-1) или полярностей (ДОФТ-2).
. На приемном конце эти колебания анализируются по способу сравнения фаз (ДОФТ-1) или полярностей (ДОФТ-2).
Следует отметить, что в каналах относительного фазового телеграфирования нужно обеспечит высокую стабильность частоты колебаний, причем эти требования возрастают с повышением рабочей частоты и скорости телеграфирования.
В настоящее время методы относительного фазового телеграфирования находят все большее применение в ряде отечественных и зарубежных систем радиосвязи.
В отличие от сигналов ЧТ, где для передачи информации используются колебания двух частот, сигналы ОФТ передаются колебанием только одной частоты, как при AT. Отсюда следует, что ширина спектра сигналов ОФТ и AT совпадает. Различие состоит лишь в уровнях гармонии. У сигнала ОФТ амплитуды гармоник зависят от значения индекса фазовой девиации  .
.
Спектр сигнала при многократном фазовом телеграфировании по ширине совпадает со спектром сигнала ОФТ. Вторым преимуществом сигналов фазовой телеграфии является работа с активной паузой, при которой лучше реализуется мощность сигнала. И, наконец, третьим преимуществом является то, что за счет когерентной обработки сигналов фазового телеграфирования на приемной стороне их уровень по сравнению с сигналами АТ возрастает в два раза, что эквивалентно увеличению отношения сигнал/помеха по мощности в четыре раза.
Узкополосность сигналов ОФТ и их хорошие энергетические показатели обеспечивают системам связи с относительным фазовым телеграфированием высокую помехоустойчивость, превышающую помехоустойчивость систем связи с ЧТ, а тем более, с АТ. Поэтому сигналы ОФТ считаются весьма перспективными.
Импульсная модуляция
При рассмотрении трех видов модуляции – АМ, ЧМ и ФМ предполагалось, что роль переносчика выполняет синусоидальное колебание высокой несущей частоты. Однако в качестве переносчика может использоваться и периодическая последовательность импульсов одинаковой формы.
Такая импульсная последовательность характеризуется следующими параметрами:
- амплитудой импульсов;
- длительностью импульсов;
- частотой следования импульсов;
- положением импульсов во времени по отношению к положению импульсов немодулированной последовательности – так называемой фазой импульсов.
Сама по себе такая последовательность импульсов не несет никакой информации, как и немодулированный высокочастотный синусоидальный сигнал.
Если изменять один из перечисленных параметров периодической последовательности импульсов по закону модулирующей функции , то можно получить четыре основных вида импульсной модуляции (рис. 1.22):
- амплитудно-импульсную модуляцию – АИМ;
- модуляцию импульсов по длительности – ДИМ;
- фазоимпульсную модуляцию – ФИМ;
- частотно-импульсную модуляцию – ЧИМ.
На рис. 1.22 передаваемый сигнал взят непрерывным, но процесс модуляции будет таким же и для дискретного сигнала. Различия будут заключатся лишь в том, что параметры переносчика при непрерывном сигнале изменяются плавно, а при дискретном – скачком. Вертикальными пунктирными линиями на рисунке отмечено положение немодулированных импульсов. На оси времени пунктир соответствует тактовым точкам.
При АИМ изменяется амплитуда импульса  При ДИМ изменяется длительность импульса
При ДИМ изменяется длительность импульса  где
где  - максимальное отклонение импульса в одну сторону. При ЧИМ по закону
- максимальное отклонение импульса в одну сторону. При ЧИМ по закону  изменяется частота следования импульсов, а при ФИМ – сдвиг импульсов относительно тактовых точек.
изменяется частота следования импульсов, а при ФИМ – сдвиг импульсов относительно тактовых точек.
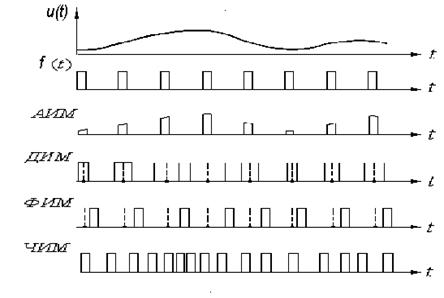
Рис.1.22
Структура спектров этих сигналов различная, а полоса их частот определяется только формой импульса и его длительностью  .
.
Так, для импульсов прямоугольной формы длительностью  , огибающая спектра имеет вид, показанный на рис. 1.23.
, огибающая спектра имеет вид, показанный на рис. 1.23.
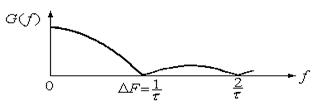
Рис.1.23
В случае передачи импульсных сигналов по каналам радиосвязи производится еще один этап модуляции, а именно, модулированными импульсами теперь модулируется синусоидальное колебание высокой несущей частоты  , подобно тому, как это было при АМ, ЧМ или ФМ. Спектр периодической последовательности полученных радиоимпульсов в два раза шире спектра последовательности видеоимпульсов. Он располагается как два зеркальных отображения вокруг несущей частоты
, подобно тому, как это было при АМ, ЧМ или ФМ. Спектр периодической последовательности полученных радиоимпульсов в два раза шире спектра последовательности видеоимпульсов. Он располагается как два зеркальных отображения вокруг несущей частоты  (рис. 1.24.). Системы связи, использующие двойную модуляцию, обозначаются как системы АИМ-АМ, АИМ-ЧМ, ЧИМ-ФМ,ФИМ-ЧМ, ФИМ-ФМ и т.п.
(рис. 1.24.). Системы связи, использующие двойную модуляцию, обозначаются как системы АИМ-АМ, АИМ-ЧМ, ЧИМ-ФМ,ФИМ-ЧМ, ФИМ-ФМ и т.п.
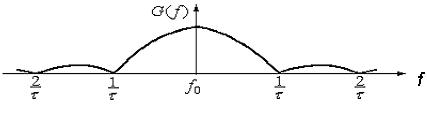
Рис.1.24
Возможны также смешанные виды импульсной модуляции. Например, одновременная модуляция импульсов по амплитуде и временному положению (АВИМ) и другие сочетания.
Шумоподобные сигналы
Остановимся кратко на вопросах использования в качестве переносчика информации шумоподобных сигналов. Оказывается, что для этой цели годятся только такие шумоподобные сигналы, которые не являются случайными. Они формируются по определенному алгоритму. Несмотря на полную схожесть таких шумоподобных сигналов со случайными процессами, их числовые характеристики остаются неизменными во времени. Модуляция в данном случае заключается в воздействии модулирующей функции на какие-либо числовые характеристики этого шумоподобного сигнала.
Шумоподобные сигналы относятся к классу широкополосных сигналов, у которых, так называемая, база больше 1. Их также называют сложными сигналами.
Простые дискретные сигналы относятся к узкополосным, а их база равна 1. База определяется как произведение длительности сигнала на его ширину спектра  . В случае узкополосных сигналов
. В случае узкополосных сигналов  и
и  связаны между собой следующем соотношением:
связаны между собой следующем соотношением:  . Отсюда следует, что для узкополосных сигналов база действительно равна 1
. Отсюда следует, что для узкополосных сигналов база действительно равна 1 
Для получения шумоподного сложного сигнала поступают следующим образом. Сигнал длительностью  разбивают на N бинарных элементов длительностью
разбивают на N бинарных элементов длительностью  . Такое разбиение позволяет получить тот же сигнал длительностью , но его полоса теперь равна
. Такое разбиение позволяет получить тот же сигнал длительностью , но его полоса теперь равна  . Известно, что чем уже импульс, тем шире полоса спектра. Так как
. Известно, что чем уже импульс, тем шире полоса спектра. Так как  , то база шумоподобного сигнала
, то база шумоподобного сигнала  .
.
Широкополосные шумоподобные сигналы (ШШС) обычно имеют базу  Их спектр распределен в широкой полосе частот, а уровень спектральных составляющих может лежать даже ниже уровня шума в канале связи. Применение ШШС в системах связи позволяют повысить их устойчивость к сосредоточенным и импульсным помехам, обеспечить энергетическую скрытность, а также осуществить многоканальную передачу информации [5] .
Их спектр распределен в широкой полосе частот, а уровень спектральных составляющих может лежать даже ниже уровня шума в канале связи. Применение ШШС в системах связи позволяют повысить их устойчивость к сосредоточенным и импульсным помехам, обеспечить энергетическую скрытность, а также осуществить многоканальную передачу информации [5] .
Значительный вклад в теорию систем связи с ШШC внесли Л.Е. Варакин, Н.Т. Петрович, В.Б. Пестряков и др.
1.6. ЦИФРОВЫЕ СИГНАЛЫ
Дискретные системы связи по сравнению с непрерывными имеют ряд преимуществ. К ним относятся высокая достоверность приема сообщений за счет применения помехоустойчивых методов кодирования сигналов, большие скорости передачи информации, более эффективное использование мощности передающих устройств, дешевизна и малые габариты аппаратуры и др. Естественно, возникает вопрос: а нельзя ли использовать дискретные системы для передачи непрерывных сообщений? Оказывается, можно, и вот почему. Любое непрерывное сообщение передается с некоторой необходимой, с точки зрения получателя, точностью. Следовательно, оно может быть заменено конечным числом символов, а это будет уже дискретное сообщение, которое после кодирования можно передать по дискретному каналу связи. Возможность передачи непрерывных сообщений конечным множеством его значений объясняется тем, что все реальные непрерывные сигналы всегда имеют конечные длительности и ограниченные спектры частот. Граничные частоты спектра сигналов определяются свойствами системы связи и самим получателем,
Для сигналов, представляющих собой функции конечной длительности с ограниченным спектром, справедлива следующая теорема В.А. Котельникова: "Функция с ограниченным спектром полностью определяется своими значениями, отсчитанными через интервалы  , где
, где  - верхняя граничная частота спектра функции".
- верхняя граничная частота спектра функции".
Таким образом, согласно теореме В.А. Котельникова, для передачи непрерывной функции с ограниченным спектром достаточно передать ее отдельные мгновенные значения, отсчитанные через интервалы  . Так как непрерывная функция полностью определяется этими значениями, то по ним она может быть восстановлена на приемном конце системы связи.
. Так как непрерывная функция полностью определяется этими значениями, то по ним она может быть восстановлена на приемном конце системы связи.
Теорема В.А. Котельникова лежит в основе дискретизациинепрерывных сигналов. Согласно этой теореме функция, не содержащая частот выше  , полностью определяется последовательностью своих значений в моменты, отстоящие друг от другана интервалы
, полностью определяется последовательностью своих значений в моменты, отстоящие друг от другана интервалы  .
.
Сигнал конечной длительности Т будет определяться  отсчетами, т.е. m числами, соответствующими мгновенным значениям сигнала. Это обстоятельство позволяет единым образом рассматривать передачу любого сигнала как передачу чисел с тактовой частотой
отсчетами, т.е. m числами, соответствующими мгновенным значениям сигнала. Это обстоятельство позволяет единым образом рассматривать передачу любого сигнала как передачу чисел с тактовой частотой  .
.
Рассмотренный вид дискретизации непрерывных сигналов называется дискретизацией по времени. Дискретизация по времени лежит в основе всех видов импульсной модуляции.
Для того, чтобы было удобно представлять значения сигнала при временной дискретизации конечным числом кодовых комбинаций, вводят дискретизацию значений функции по уровню. Эта операция носит название квантования сигнала.
Смысл ее состоит в том, что вместо данного мгновенного значения сигнала  передается ближайшее значение сигнала, согласно выбранной шкале дискретных уровней (рис.1.25). Чаще всего шкала квантования имеет постоянный шаг (
передается ближайшее значение сигнала, согласно выбранной шкале дискретных уровней (рис.1.25). Чаще всего шкала квантования имеет постоянный шаг (  ).
).
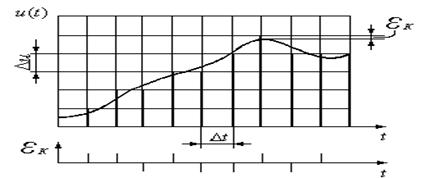
Рис.1.25
При квантовании по уровню сознательно вносится погрешность, так как истинное значение сигнала  заменяется округленным значением
заменяется округленным значением  . Эта погрешность, равная
. Эта погрешность, равная  , называется помехой квантования или шумом квантования. Шаг квантования выбирается таким образом, чтобы случайная помеха в канале связи не превосходила половины шага квантования. Тогда на приемном конце квантованный сигнал, с наложенной на него помехой, можно снова проквантовать и освободить от помехи. Квантование по уровню позволяет предотвратить накопление помех при передаче сигнала по линии связи.
, называется помехой квантования или шумом квантования. Шаг квантования выбирается таким образом, чтобы случайная помеха в канале связи не превосходила половины шага квантования. Тогда на приемном конце квантованный сигнал, с наложенной на него помехой, можно снова проквантовать и освободить от помехи. Квантование по уровню позволяет предотвратить накопление помех при передаче сигнала по линии связи.
Таким образом, дискретизация по времени и квантование по уровню позволяет непрерывное сообщение преобразовать в дискретное, которое затем легко закодировать, превратив в цифровой сигнал, и передать методами дискретной техники. В этом случае при передаче непрерывного сообщения появляется возможность применения помехоустойчивых способов приема и обработки сигналов, а также сопряжения устройств связи с цифровыми вычислительными машинами.
В технике связи из таких систем наибольшее применение получили система с импульсно-кодовой модуляцией (ИКМ).
В системе с ИКМ непрерывный сигнал дискретизируется по времени и квантуется по уровню, а затем кодируется двоичным кодом. Так для передачи речевого сигнала со 128 уровнями достаточно применить семизначный двоичный код (27=128). При этом частота временной дискретизации выбирается из условия  = 6,8 кГц, так как верхняя граничная частота в спектре речевого сигнала, ограниченного полосой канала тональной частоты, равна 3,4 кГц. В реальных системах с ИКМ частота
= 6,8 кГц, так как верхняя граничная частота в спектре речевого сигнала, ограниченного полосой канала тональной частоты, равна 3,4 кГц. В реальных системах с ИКМ частота  выбирается равной 8 кГц. Полученные кодовые комбинации могут передаваться по системе связи любым методом дискретной манипуляции. В большинстве случаев применяется частотная манипуляция (КИМ-ЧМ) или относительная фазовая манипуляция (КИМ-ОФМ).
выбирается равной 8 кГц. Полученные кодовые комбинации могут передаваться по системе связи любым методом дискретной манипуляции. В большинстве случаев применяется частотная манипуляция (КИМ-ЧМ) или относительная фазовая манипуляция (КИМ-ОФМ).
1.7. ПОМЕХИ В КАНАЛАХ СВЯЗИ
Сигналы при передаче от отправителя к получателю изменяет свои параметры из-за искажений, вносимых самим каналом и действия случайных помех. Поэтому на приёмной стороне они воспроизводятся с некоторой ошибкой, что ведёт к понижению верности и скорости передачи.
Помехи подразделяются на внутренние и внешние и их вероятностные характеристики существенно различны.
По характеру спектра помехи подразделяются на флуктуационные, сосредоточенные и импульсные. Эти помехи называются аддитивными. Они воздействуют на вход приёмника и проявляются на его выходе независимо от того есть сигнал или его нет. Аддитивные помехи складываются с сигналом и их часто называют шумом.
Кроме аддитивных помех в канале связи могут действовать мультипликативные помехи, которые непосредственно связаны с прохождением сигнала в канале связи. Мультипликативная помеха перемножается с сигналом и проявляется лишь при наличии сигнала. По сути, это коэффициент передачи канала, который изменяется случайным образом во времени. Мультипликативные помехи часто возникают как результат многолучевого распространения радиоволн.
Каналы связи подразделяются на каналы с постоянными и переменными параметрами. К каналам с постоянными параметрами относятся проводные каналы и радиоканалы УКВ прямой видимости. Практически все каналы радиосвязи относятся к каналам с переменными параметрами. Более подробно эти вопросы излагаются в параграфе 7.4.
1.8. ЭНТРОПИЯ, КОЛИЧЕСТВО ИНФОРМАЦИИ И ИЗБЫТОЧНОТЬ В СООБЩЕНИИ
Из рассмотрения функциональной схемы системы передачи дискретных сообщений (рис. 1.10) видно, что по пути от источника к получателю сообщение претерпевает различные изменения. Процесс преобразования символов одного алфавита в символы другого алфавита называется кодированием, а само правило такого перевода – кодом. Кодирование может быть естественным (в виде букв, цифр, иероглифов) и искусственным (в виде условных сигналов, обозначающих те же буквы, цифры и т.п., точками и тире, единицами и нулями и др.). Код обычно представляют в виде таблицы, в которой каждому сообщению сопоставляется кодовое обозначение.
Для равномерного кода длина всех кодовых комбинаций одинакова, а их общее число выражается формулой
 , (1.20)
, (1.20)
где  – основание кода;
– основание кода;
 – значность кода.
– значность кода.
Если кодовые комбинации имеют различное число знаков, то такой код называют неравномерным.
Всё рассмотренное выше относительно дискретных сообщений справедливо и для непрерывных сообщений. Это показал В. А. Котельников в своей фундаментальной теореме об отсчётах, согласно которой любой непрерывный сигнал, имеющий спектр частот, ограниченный верхней частотой  , полностью определяется последовательностью своих мгновенных значений, отсчитанных через интервал времени
, полностью определяется последовательностью своих мгновенных значений, отсчитанных через интервал времени  [14].
[14].
Поскольку сообщение несёт информацию, то для техники связи очень важно уметь определять количество информации, содержащееся в сообщения.
В формуле (1.20) число комбинаций  это ничто иное, как количество сообщений, сформированных из равновероятных и независимых элементов. С ростом и число сообщений
это ничто иное, как количество сообщений, сформированных из равновероятных и независимых элементов. С ростом и число сообщений  увеличивается. Поэтому величину
увеличивается. Поэтому величину  можно использовать как основу для определения меры количества информации. Это позволит сравнивать различные источники сообщений с точки зрения согласованной передачи их сигналов по каналам связи.
можно использовать как основу для определения меры количества информации. Это позволит сравнивать различные источники сообщений с точки зрения согласованной передачи их сигналов по каналам связи.
Мера количества информации должна удовлетворять условию аддитивности, т.е. более длинное сообщение должно содержать соответственно большее количество информации.
Следовательно, количество информации  , содержащееся в сообщении, должно быть функцией от , т.е.
, содержащееся в сообщении, должно быть функцией от , т.е.  . Так как число элементов n находится в показательной степени, то для определения J лучше применять логарифмическую функцию:
. Так как число элементов n находится в показательной степени, то для определения J лучше применять логарифмическую функцию:
 , (1.21)
, (1.21)
где  – количество элементов в сообщении (значность кода);
– количество элементов в сообщении (значность кода);
 – общее число возможных состояний элемента (основание кода);
– общее число возможных состояний элемента (основание кода);
 – основание логарифма, определяющее количество информации.
– основание логарифма, определяющее количество информации.
Если основание когда m и основание логарифма в выбирать равными 2, то количество информации при таких условиях принимается за единицу, которая называется «бит» (двоичная единица).
Таким образом, формула для количества информации в одном сообщении при взаимонезависимых друг от друга и равновероятных элементах сообщения в «битах» будет иметь вид
 . (1.22)
. (1.22)
Однако, в общем случае вероятность появления различных символов в сообщении может быть неодинаковой. Например, в русском языке чаще всего встречается буква О, а в реже всего – буква Ф.
В этом случае при определении количества информации, нужно применять правило сложения вероятностей. Так как источник сообщения может принять одно из возможных m состояний с присущей ему вероятностью, то полная группа сообщений будет равна
 , (1.23)
, (1.23)
где  – вероятность появления
– вероятность появления  -того элемента.
-того элемента.
Таким образом, количество информации при неравновероятных и взаимонезависимых элементах сообщения находится по формуле
 . (1.24)
. (1.24)
Знак минус определяется тем, что  , а
, а  , т.е. имеет отрицательное значение.
, т.е. имеет отрицательное значение.
Неравновероятность появления элементов сообщения уменьшает количество информации, которое приходится на один элемент сообщения. Отсюда следует, что  .
.
В реальных источниках информации элементы сообщения чаще всего и неравновероятны, и взаимозависимы. Действительно, в тексте буквы появляются не только с разной вероятностью  , но и взаимосвязаны между собой. Значит нужно учитывать условные вероятности
, но и взаимосвязаны между собой. Значит нужно учитывать условные вероятности  , т.е. вероятность появления буквы
, т.е. вероятность появления буквы  , если перед ней была буква . Например, после согласной, как правило, идёт гласная буква, хотя есть исключения.
, если перед ней была буква . Например, после согласной, как правило, идёт гласная буква, хотя есть исключения.
Отсюда следует, что количество информации при неравновероятных и взаимозависимых элементах сообщения может быть найдено из выражения
 , (1.25)
, (1.25)
Здесь количество информации на один элемент сообщения ещё больше уменьшается, чем в предыдущих случаях, т.е.  .
.
Следует обратить внимание на то, что информация, полученная от источника, будет тем ценнее и содержательнее, чем больше была неопределённость до её получения.
В качестве меры априорной (доопытной) неопределённости источника информации принимается энтропия.
Если до принятия информации от источника была полная неопределённость, которая характеризовалась энтропией  , то после получения информации эта неопределённость устраняется и энтропия становится равной нулю. Это значит, что энтропия численно равна количеству полученной информации, приходящейся на один элемент сообщения.
, то после получения информации эта неопределённость устраняется и энтропия становится равной нулю. Это значит, что энтропия численно равна количеству полученной информации, приходящейся на один элемент сообщения.
Это обстоятельство позволяет найти энтропию для трёх ранее рассмотренных источников информации:
¾ при равновероятных и взаимонезависимых элементах сообщения
 , (1.26)
, (1.26)
¾ при неравновероятных и взаимонезависимых элементах сообщения
 , (1.27)
, (1.27)
¾ при неравновероятных и взаимозависимых элементах сообщения
 . (1.28)
. (1.28)
Отсюда следует, что энтропия источника во всех рассмотренных случаях определяется количеством информации, переносимым одним символом сообщения. А так как  , то энтропия
, то энтропия  .
.
Энтропия обладает следующими свойствами:
¾  , если одно из сообщений источника информации достоверно, а другие, образующие полную группу сообщений, невозможны;
, если одно из сообщений источника информации достоверно, а другие, образующие полную группу сообщений, невозможны;
¾  , когда все сообщения источника информации равновероятны (при их конечном числе);
, когда все сообщения источника информации равновероятны (при их конечном числе);
¾ возрастает с увеличением равновероятных сообщений от источника информации;
¾ обладает свойством аддитивности: если несколько независимых источников информации объединяются в один, то их энтропии складываются  .
.
Неравновероятность и взаимозависимость элементов сообщения уменьшает количество информации, а значит и энтропию, на один элемент сообщения. Значит, для передачи одного и того же количества информации потребуется элементов сообщения больше, чем в том случае, когда они равновероятны и взаимонезависимы.
Предположим, что необходимо передать определённое количество информации (  ).
).
Если элементы сообщения равновероятны и взаимонезависимы, то для передачи заданного количества информации потребуется число элементов, равное
 . (1.29)
. (1.29)
Для неравновероятных, но взаимонезависимых элементов сообщения их число будет равно
 . (1.30)
. (1.30)
Так как  , то
, то  , т.е. число элементов для передачи того же количества информации возрастёт.
, т.е. число элементов для передачи того же количества информации возрастёт.
И, наконец, когда элементы сообщения будут неравновероятны и взаимозависимы, для передачи той же информации, потребуется число элементов, равное
 . (1.31)
. (1.31)
Поскольку  , то
, то  .
.
Таким образом, передача одного и того же количества информации во втором и третьем случае потребует затраты соответственно  и
и  избыточных символов.
избыточных символов.
Мерой полной избыточности служит относительное число лишних элементов:
 . (1.32)
. (1.32)
Избыточность можно выразить через энтропию
 . (1.33)
. (1.33)
Помимо полной избыточности, существует понятие частной избыточности, обусловленное неравновероятностью элементов
 , (1.34)
, (1.34)
и частной избыточности, обусловленное только взаимосвязью элементов сообщения
 . (1.35)
. (1.35)
Между (1.33), (1.34) и (1.35) существует следующая зависимость
 . (1.36)
. (1.36)
Если  и
и  невелики, то можно воспользоваться приближённым выражением
невелики, то можно воспользоваться приближённым выражением
 . (1.37)
. (1.37)
1.9. ПРОПУСКНАЯ СПОСОБНОСТЬ КАНАЛА СВЯЗИ
Уже отмечалось, что для техники связи важно определить количество информации в сообщениях, поскольку это даёт возможность не только сравнивать источники сообщений, но и выяснить соотношения между характеристиками сигнала и свойствами канала связи.
В параграфе 1.1 было показано, что физическими характеристиками сигнала являются: его длительность –  , полоса частот –
, полоса частот –  и динамический диапазон –
и динамический диапазон –  , где
, где  – мощность сигнала, а
– мощность сигнала, а  – мощность шума.
– мощность шума.
Произведение этих характеристик – это объём сигнала  .
.
Чтобы решить вопрос о возможностях передачи по данному каналу того или иного сигнала вводят характеристики канала связи:  – время использования канала,
– время использования канала,  – ширина полосы частот канала и
– ширина полосы частот канала и  – динамический диапазон канала. Произведение этих трёх характеристик называется ёмкостью канала –
– динамический диапазон канала. Произведение этих трёх характеристик называется ёмкостью канала –  .
.
Условием неискажённой передачи сигнала по каналу связи являются требования:  ,
,  ,
,  , т.е.
, т.е.  .
.
Понятно, что для выполнения этих требований часто приходится прибегать к операциям согласования сигнала с каналом, путём обмена одной характеристики сигнала на другую.
К. Шеннон показал, что между количеством информации и объёмом сигнала существует зависимость – чем больше объём сигнала  , тем большее количество информации
, тем большее количество информации  в нём содержится при данной удельной содержательности
в нём содержится при данной удельной содержательности  . Если
. Если  , то
, то  .
.
В реальных каналах связи всегда существует шумы (помехи). Поэтому кроме полезной информации  на вход приёмника поступает и «информация»
на вход приёмника поступает и «информация»  от шума.
от шума.
Общую полученную информацию можно записать в виде
 . (1.38)
. (1.38)
Отсюда полезная информация равна
 , (1.39)
, (1.39)
где  – мощность сигнала;
– мощность сигнала;
– мощность шумов.
Полоса  и время
и время  для сигнала и шума соответственно равны, поэтому
для сигнала и шума соответственно равны, поэтому  – это полоса канала
– это полоса канала  .
.
Таким образом полезная информация определяется выражением
 . (1.40)
. (1.40)
Найдём пропускную способность канала связи, определяющую максимальную скорость передачи информации. Она равна максимальному количеству информации, которую можно передать по каналу связи в единицу времени
 . (1.41)
. (1.41)
Подставляя (1.40) в (1.41), получим формулу для пропускной способности канала связи с шумами
 . (1.42)
. (1.42)
Эта формула получена Шенноном и названа его именем.
Поскольку полностью отделить сигнал от шума невозможно, то предельную пропускную способность канала связи практически достичь трудно.
Интересно отметить, что при отношении  , пропускная способность канала
, пропускная способность канала  , а так как
, а так как  , то
, то  , т.е.
, т.е.  , а удельная содержательность
, а удельная содержательность  .
.
Формула Шеннона позволяет сделать важный вывод: при любом уровне шума в канале связи его пропускная способность никогда не будет равна нулю. Это значит, что всегда можно передавать сигналы без искажения, однако для этого необходимо выбирать сигналы особой формы и применять специальные процедуры кодирования сообщений. А это в свою очередь связано с повышением избыточности сообщения.
Так что же, избыточность полезна или вредна?
В зависимости от конкретной ситуации, избыточность рассматривать с двух точек зрения. Если канал без помех, избыточность нежелательна. Чем она больше, тем труднее согласовывать источник информации с каналом связи. Поэтому способы кодирования в каналах без помех направлены на устранение избыточности. При передаче информации по каналу с помехами избыточность полезна, так как она повышает помехоустойчивость. Вот почему способы кодирования в каналах с помехами требуют введения избыточности, чтобы уменьшить вредное действие помех. В этом случае применяются помехоустойчивые коды, обнаруживающие и исправляющие ошибки.
КОНТРОЛЬНЫЕ ВОПРОСЫ
1. Чем отличают канал и система связи?
2. Какими показателями характеризуется любая система передачи информации?
3. Назовите физические характеристики сигнала и канала связи.
4. Чем отличаются непрерывные и дискретные сообщения?
5. Что такое первичный электрический сигнал?
6. Назовите основные характеристики речи и слуха.
7. Поясните термин «канал тональной частоты».
8. Дайте характеристику дискретным сигналам.
9. Какие виды модуляции применяются в непрерывных и дискретных системах связи?
10. Поясните принцип относительной фазовой телеграфии.
11. Что такое шумоподобные сигналы и где они применяются?
12. Какие виды помех Вы знаете?
13. Как определить количество информации в сообщении?
14. Что такое энтропия сообщения?
15. Как определить избыточность в сообщении?
16. Напишите и поясните формулу Шеннона.
Глава 2
СИТЕМЫ КАНАЛООБРАЗОВАНИЯ
2.1. КЛАССИФИКАЦИЯ МНОГОКАНАЛЬНЫХ СИСТЕМ СВЯЗИ
Рост потоков передаваемой информации требует более эффективно использовать дорогостоящие сооружения связи. Эта проблема находит свое решение путем применения многоканальных систем связи [3].
Системой N – канальной связи называется совокупность технических средств и среды распространения, обеспечивающая одновременную и независимую передачу сообщений от N источников к N получателям по одной линии связи.
Функциональная схема многоканальной системы связи представлена на рис. 2.1.
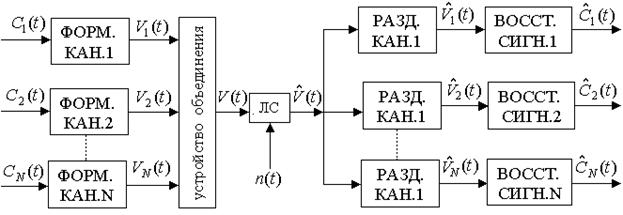
Рис. 2.1
Первичные сигналы  преобразуются в формирователях каналов в сигналы
преобразуются в формирователях каналов в сигналы  , которые называются канальными. Если групповой сигнал V(t) можно получить суммированием, канальных сигналов
, которые называются канальными. Если групповой сигнал V(t) можно получить суммированием, канальных сигналов  , то в этом случае многоканальные системы называются аддитивными.
, то в этом случае многоканальные системы называются аддитивными.
Системы, в которых формирование группового сигнала осуществляется иными способами, называются комбинационными.
В настоящее время наибольшее применение получили многоканальные аддитивные системы как в проводной, так и в радиосвязи.
Задача разделения каналов есть ни что иное, как задача разделения сигналов. Здесь существует некоторая аналогия с отделением сигнала от помехи. Однако, если характеристики помех от нас не зависят, то характеристики сигналов различных каналов могут быть выбраны по нашему усмотрению из условий наилучшего разделения этих сигналов. Для этого сигналы нужно наделить некоторыми вполне определенными признаками, по которым их можно легко разделить.
Вопросы, связанные с приданием отличительных признаков каждому канальному сигналу, решает каналообразующая аппаратура (КОА) или аппаратура уплотнения (АУ).
Для выделения сигнала некоторого канала из смеси сигналов, поступающих из линии связи, необходимо произвести операцию разделения.
Если операция разделения сигналов, принадлежащих различным каналам, происходит посредством линейных фильтров, такая многоканальная система называется линейной. Если же разделение сигналов осуществляется нелинейными фильтрами, то система называется нелинейной. Кроме того, она является синхронной или асинхронной в зависимости от того, являются ли фильтры, разделяющие сигналы, фильтрами с постоянными или переменными во времени параметрами.
В многоканальных системах возникает специфический вид помех: помехи от соседних каналов, которые возникают из-за несовершенства разделения сигналов. Кроме того, на сигнал накладываются помехи  .
.
Для обеспечения максимальной помехоустойчивости многоканальной системы, необходимо и достаточно, чтобы переносчики канальных сигналов были ортогональны.
Различают следующие многоканальные системы передачи:
- с разделением каналов по частоте (ЧРК);
- с разделением каналов по времени (ВРК);
- цифровые многоканальные системы передачи (ЦСП);
- асинхронные адресные системы передачи (ААСП);
- комбинационные системы передачи (КСП);
- нелинейные системы передачи (НСП).
Системы передачи с ЧРК и ВРК относятся к аддитивным линейным системам и находят на практике широкое применение как в проводных системах, так и в системах радиосвязи. Эти многоканальные системы используются в радиорелейной и спутниковой связи, поскольку они работают в диапазонах УКВ с большой частотной емкостью. В этих системах используется двойная, а иногда и тройная модуляция. Поэтому при использовании той или иной многоканальной аппаратуры вводятся специальные обозначения применяемых видов модуляции. Например, в системах с ВРК: АИМ – ЧМ; ШИМ – АМ и т.д. Здесь первичная модуляция АИМ или ШИМ, а вторичная (в радиопередатчике) ЧМ или АМ.
К любой системе многоканальной передачи предъявляются следующие требования:
- обеспечение необходимого числа каналов на требуемую дальность связи;
- высокое качество связи;
- использование в качестве основного канала – канала тональной частоты с полосой 0,3÷3,4 кГц.
Перечисленные методы разделения каналов еще называют первичным уплотнением. Часто каналы тональной частоты уплотняются с помощью аппаратуры вторичного уплотнения десятками телеграфных и телекодовых сигналов, используя принципы частотного или временного разделения каналов.
2.2.СИСТЕМЫ ПЕРЕДАЧИ С РАЗДЕЛЕНИЕМ КАНАЛОВ ПО ЧАСТОТЕ (ЧРК)
В системах передачи с ЧРК каждому каналу отводится своя независимая полоса частот (рис. 2.2).
Рис. 2.2
Общий диапазон частот группового сигнала  . Здесь каждому сигналу Vi(t) соответствует свой канальный спектр Si(f). Спектры канальных сигналов не перекрываются, поскольку сигналы Vi(t) есть также не перекрывающееся по частоте множество.
. Здесь каждому сигналу Vi(t) соответствует свой канальный спектр Si(f). Спектры канальных сигналов не перекрываются, поскольку сигналы Vi(t) есть также не перекрывающееся по частоте множество.
Отсюда следует
 (2.1)
(2.1)
где Bi – некоторая константа, определяющая энергию i –того сигнала Еi.
Из выражения (2.1) видно, что спектры канальных сигналов ортогональны. Пользуясь преобразованием Фурье, можно доказать [3], что и сами временные канальные сигналы также ортогональны, т.е.
 (2.2)
(2.2)
Итак, в системах с ЧРК спектры канальных сигналов размещаются в неперекрывающихся частотных полосах. Размещение спектров первичных сигналов в соответствующих частотных полосах осуществляется при помощи амплитудной, частотной или фазовой модуляции. В качестве переносчиков используются гармонические колебания (поднесущие частоты) вида
 . (2.3)
. (2.3)
Поднесущие частоты выбираются так, чтобы спектры модулированных колебаний не перекрывались. В результате полоса каждого канала  состоит из полосы сигнала
состоит из полосы сигнала  и защитного интервала
и защитного интервала  (рис. 2.2.). На приемной стороне канальные сигналы разделяются частотными фильтрами.
(рис. 2.2.). На приемной стороне канальные сигналы разделяются частотными фильтрами.
Структурная схема многоканальной системы передачи с ЧРК показана на рис. 2.3.
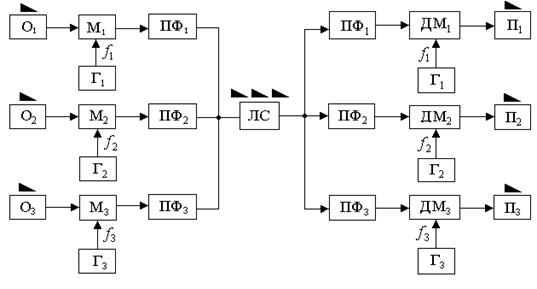
Рис. 2.3
Независимо от выбранного вида модуляции формирование многоканального (в данном случае трехканального) сигнала осуществляется следующим образом. Предположим, что передаче подлежат телефонные сигналы с полосой 0,3-3,4 кГц от отправителей О1-О3. Формирование канальных сигналов в передающей аппаратуре производится модуляторами М1-М3, на второй вход которых подаются поднесущие колебания f1, f2 и f3 такой величины, чтобы спектры модулированных канальных сигналов не перекрывались. Вид модуляции может быть амплитудный, частотный или фазовый. Из рассмотрения всех видов модуляции есть возможность выбрать наиболее экономичный способ использования линейного спектра частот. Так, значительное расширение полосы частот при ЧМ и ФМ существенно сужает область применения этих видов модуляции, особенно в проводной связи. В то же время при передаче по радиорелейным линиям в условиях больших помех целесообразно применять помехоустойчивые виды модуляции ЧМ или ФМ.
С другой стороны из всех возможных методов АМ (передача двух полос и несущей, передача одной боковой полосы и несущей, передача двух боковых полос без несущей и т.д.) метод передачи одной боковой полосы частот (ОБП) посредством однополосной модуляции (ОМ) позволяет наиболее рационально использовать линейный спектр частот, поскольку ширина спектра канального сигнала при ОБП минимальна и равна ширине спектра первичного сигнала  . Кроме того, при ОБП подавляется несущая и вторая боковая полоса, что позволяет, во-первых, значительно увеличить мощность оставшейся боковой полосы, и, во-вторых, вдвое сузить ширину канального сигнала. Все это обеспечивает значительно большую помехоустойчивость ОБП по сравнению с другими методами АМ. И еще, при ОБП отсутствует квадратурные искажения.
. Кроме того, при ОБП подавляется несущая и вторая боковая полоса, что позволяет, во-первых, значительно увеличить мощность оставшейся боковой полосы, и, во-вторых, вдвое сузить ширину канального сигнала. Все это обеспечивает значительно большую помехоустойчивость ОБП по сравнению с другими методами АМ. И еще, при ОБП отсутствует квадратурные искажения.
Восстановление сигнала ОБП на приемной стороне требует применение местного высокостабильного генератора, несущие колебания которого совпадали бы с несущими колебаниями передачи. В противном случае появится сдвиг частот в канале, что понизит качество передачи. Кроме того, расхождение частот генераторов на передающем и приемном конце может привести к неполному подавлению второй боковой полосы, а следовательно, к колебанию остаточного затухания канала и неустойчивости его работы.
В настоящее время системы с ЧРК строятся по индивидуальному и групповому принципу. Рассмотренная на рис. 2.3 система построена по индивидуальному принципу. Здесь каждый канал образуется отдельным оборудованием, что ведет к громоздкости аппаратуры при большом числе каналов. Достоинством такой системы является простота выделения любого канала в промежуточных пунктах.
При групповом принципе все оборудование, кроме индивидуальных преобразователей со своими генераторами и фильтрами на передающем и приемном конце, является общим для всех каналов (рис. 2.4).
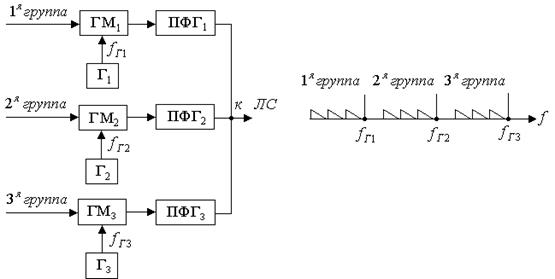
Рис. 2.4
Первоначально создаются первичные группы так, как это показано на рис. 2.3 (передающая часть). Затем спектры таких первичных групп переносятся в отведенный им диапазон частот с помощью групповых модуляторов ГМ1-ГМ3 с поднесущими fГ1-fГ3 (рис. 2.4). Здесь также выделяется однополосный, но групповой сигнал, что позволяет сократить полосу частот передаваемого группового сигнала в два раза.
Для выделения на приемной стороне требуемого канального сигнала, необходимо произвести обратные преобразования спектров сигналов сначала в групповых, а потом в индивидуальных системах.
Используя групповой принцип, можно создать систему с ЧРК на любое число каналов. Предельное количество каналов будет определяться граничной частотой линии связи.
В системах с ЧРК пользуются следующими показателями:
- полоса частот сигнала  ;
;
- защитный интервал  ;
;
- канальный интервал  ;
;
- поднесущие частоты  , где n – число каналов;
, где n – число каналов;
- верхняя частота группового сигнала  .
.
Каналообразующая аппаратура (КОА) является универсальной для проводных систем связи и для систем радиорелейной связи, т.е. для систем дальней связи. Здесь главной задачей является обеспечить необходимое число каналов на заданную дальность при требуемом качестве связи. Поэтому главными требованиями к системам дальней многоканальной связи являются:
- основным каналом должен быть канал ТЧ с полосой 0,3÷3,4 кГц;
- необходимое число каналов должна обеспечивать типовая КОА путем наращивания каналов ТЧ;
- все характеристики КОА должны быть унифицированы, что позволит сопрягать любые каналы связи на любую дальность;
- величина остаточного затухания должна быть стабильной, что необходимо для вторичного уплотнения канала ТЧ и исключения его самовозбуждения.
В заключение следует отметить, что рациональное использование спектра частот и высокая помехоустойчивость метода ОБП сделали его основным в многоканальных системах передачи с ЧРК.
2.3.СИСТЕМЫ ПЕРЕДАЧИ С ВРЕМЕННЫМ РАЗДЕЛЕНИЕМ КАНАЛОВ (ВРК)
При временном разделении каналов каждому абоненту отводится свой независимый интервал времени, не перекрывающийся по времени с другими абонентами. Сообщения абонентов передаются последовательно одно за другим с частотой следования канальных импульсов, определяемой теоремой В.А. Котельникова. Для осуществления синхронной работы передающего и приемного устройства в системе предусмотрены сигналы синхронизации (СС). Временная эпюра распределения каналов при ВРК показана на рис. 2.5.
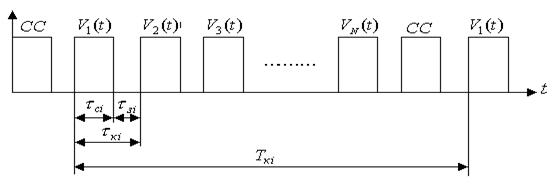
Рис. 2.5
Групповой сигнал  лежит на общем интервале времени Тк i, но временные интервалы канальных сигналов не перекрываются. В силу этого
лежит на общем интервале времени Тк i, но временные интервалы канальных сигналов не перекрываются. В силу этого
 (2.4)
(2.4)
Следовательно, такие сигналы ортогональны.
Системы с ВРК характеризуются следующими параметрами:
- период следования канальных импульсов
 ,
,
где Fв – верхняя частота в спектре аналогового сигнала;
 - коэффициент.
- коэффициент.
- длительность канального импульса  ;
;
- защитный интервал  ;
;
- канальный интервал  ;
;
- частота следования N каналов  ;
;
- полоса спектра сигнала  .
.
В системах передачи с ВРК в качестве переносчиков используются периодические последовательности импульсов. Модулируя какой-либо из параметров импульса, можно получить:
- амплитудно-импульсную модуляцию (АИМ);
- широтно-импульсную модуляцию (ШИМ);
- временную импульсную модуляцию (ВИМ), разновидностью которой является фазо-импульсная модуляция (ФИМ);
- частотно-импульсную модуляцию (ЧИМ).
На рис. 2.6 приведена структурная схема системы с ВРК.
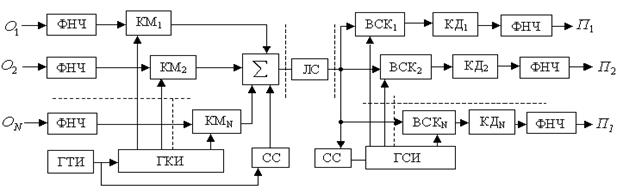 Рис. 2.6
Рис. 2.6
На этом рисунке приняты обозначения: ГТИ – генератор тактовых импульсов; ГКИ – генератор канальных импульсов; СС – система синхронизации, формирующая синхроимпульсы; КМ – канальный модулятор; Σ – сумматор канальных импульсов; О – отправитель сообщения; ЛС – линия связи; ВСК – временный селектор каналов; КД – канальный демодулятор; ГСИ – генератор селекторных импульсов; П – получатель сообщения; ФНЧ – фильтр нижних частот с полосой 0,3-3,4 кГц.
В приведенной системе может использоваться любой из ранее перечисленных видов модуляции канального импульса при передаче телефонных сигналов. Телефонные сигналы ограничиваются полосой частот 0,3-3,4 кГц с помощью фильтров нижних частот, стоящих перед канальными модуляторами. Сигналы поступают на входы канально-импульсных модуляторов, при помощи которых речевые сигналы преобразуются в сигналы АИМ посредством импульсных переносчиков, поступающих от ГКИ.
Сигналы АИМ менее помехоустойчивы, чем сигналы ФИМ, поэтому при помощи преобразования АИМ – ФИМ производится преобразование импульсных сигналов, модулированных по амплитуде, в сигналы, модулированные по фазе. Затем все канальные сигналы объединяются в групповой сигнал в сумматоре Σ и подаются вместе с синхроимпульсом в линию связи. Сам синхросигнал отличается от канальных сигналов определенными признаками, что позволяет выделить его на приемной стороне.
В приемной части аппаратуры сигналы поступают на временные селекторы каналов, поочередно открывающиеся и пропускающие импульсы, относящиеся только к данному каналу. Далее осуществляется преобразование ФИМ – АИМ, а восстановление непрерывного сигнала производится ФНЧ с полосой частот 0,3 – 3,4 кГц.
В принципе системы передачи с ВРК могут использовать только АИМ или ШИМ. В этом случае после канальных демодуляторов сигналы поступают на ФНЧ, где и происходит восстановление аналогового сигнала.
Если же в системе использовалась ФИМ или ВИМ, то сначала нужно произвести обратные преобразования ФИМ – АИМ или ВИМ – ШИМ, а затем сигнал подать на ФНЧ.
Работой временных селекторов каналов и преобразователей одного вида импульсной модуляции в другой управляет ГСИ, синхронизируемый СС.
В отличие от систем с ЧРК системы с ВРК, обладая более высокой помехоустойчивостью, имеют существенный недостаток. С увеличением числа каналов, длительность канального импульса уменьшается, что ведет к расширению спектра частот сигнала. В связи с этим в системах с временным разделением число каналов обычно не превышает 48.
И, в заключение, следует отметить, что взаимные помехи между каналами в системах передачи с ВРК появляются вследствие ограничения полосы пропускания группового тракта, неравномерности его амплитудно-частотной и нелинейности фазо-частотной характеристик.
2.4.ЦИФРОВЫЕ МНОГОКАНАЛЬНЫЕ СИСТЕМЫ ПЕРЕДАЧИ
В системах с цифровой передачей информации используется принцип дискретизации непрерывных сообщений согласно теореме В.А. Котельникова. Затем применяется операция квантования дискретного сигнала по уровню. При этом шаг квантования выбирается таким, чтобы помеха не превосходила половину шага квантования. Внутри каждого шага квантования устанавливаются разрешенные для передачи уровни квантования, т.е. значения сигнала. Это позволяет аналоговые первичные сигналы представить последовательностью импульсов с частотой дискретизации  , где
, где  , а F в – максимальная (верхняя) частота спектра сигнала.
, а F в – максимальная (верхняя) частота спектра сигнала.
Амплитуды дискретных сигналов квантования уже не будут равны мгновенным значениям сигнала, а будут представлены ближайшими разрешенными для передачи уровнями. Такие сигналы позволяют повысить помехоустойчивость и исключить накопление помех в линии связи путем восстановления сигнала в рамках разрешенных значений, если, конечно, помеха не превзойдет половину уровня квантования. Понятно, что с увеличением шага квантования помехи будут сказываться меньше.
Известно [4], что наилучшую помехоустойчивость обеспечивают двоичные сигналы (1, 0). Поэтому целесообразно АИМ сигналы преобразовывать в двоичный код. Эта операция называется кодированием, а сочетание квантования по уровню и кодирования называется импульсно-кодовой модуляцией (ИКМ). На приемной стороне последовательность двоичных сигналов, т.е. сигналы ИКМ вновь преобразуются в квантованный АИМ сигнал. Эта операция называется декодированием. Чтобы восстановить аналоговый первичный сигнал, его подают на фильтр нижних частот с верхней частотой среза F в.
ИКМ отличается от других импульсных методов модуляции тем, что каждому разрешенному дискретному уровню квантованного АИМ сигнала ставится определенная двоичная кодовая комбинация. Для каждой кодовой комбинации отводится временной интервал ТД, который разбит на позиции по числу значности кода. Например, квантованный АИМ сигнал имеет 8 уровней. При основании кода m = 2, значностью кода будет n = 3 (N = mn = 23 = 8). Так, нулевое значение сигнала будет представлено комбинацией 000, единица – 001, двойка – 010, четверка – 100, …, семерка – 111. Действительно, от 0 до 7 – восемь уровней.
Системы с ИКМ находят широкое применение в цифровых устройствах передачи информации в силу ряда своих достоинств. К ним следует отнести:
- высокая помехоустойчивость даже при большом уровне помех;
- возможность регенерации сигналов при передаче их на большие расстояния и при ретрансляции сигналов;
- универсальная форма представления сигналов в виде кодовых комбинаций, независимо от того, какой это сигнал – речь, музыка, телевизионное изображение, команды управления и т.п.;
- простота согласования цифровых систем передачи с ЦВМ;
- применение малогабаритных цифровых фильтров для селекции сигналов;
- слабая зависимость неидеальности и нестабильности характеристик аппаратуры на качество передачи.
Наряду с достоинствами системы с ИКМ имеют недостатки:
- необходимость в высокоточной синхронизации сигналов;
- значительное расширение спектра сигнала, а значит, и потребность в более широкой полосе канала;
- ограничение дальности передачи в случае фазовых ошибок тактовой синхронизации.
Однако, отмеченные недостатки не повлияли на развитие цифровых методов передачи информации и в настоящее время системы с ИКМ нашли самое широкое применение в многоканальных проводных системах, в системах радиосвязи, в спутниковых системах связи и т.п.
В системах с цифровой передачей информации применяются кодово-импульсная модуляция (ИКМ) и дельта-модуляция (ДМ).
Рассмотрим принцип построения систем с ИКМ. В этих системах могут применяться различные переносчики для передачи цифровых сигналов и различные способы разделения канальных сигналов, чаще всего ЧРК и ВРК.
На рис. 2.7 приведена структурная схема многоканальной системы ИКМ – ВРК. Эта система предназначена для передачи телефонных сигналов с полосой частот 0,3-3,4 кГц.
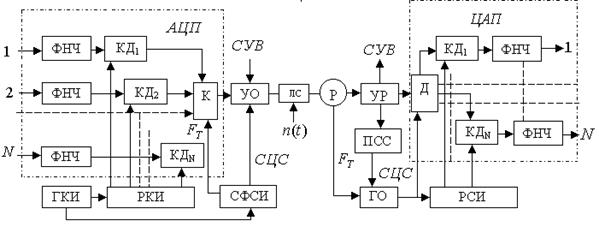
Рис. 2.7
На передающей стороне аналоговые сигналы через фильтры нижних частот (ФНЧ) подаются на канальные дискретизаторы КД, управляемые сигналами распределителя канальных импульсов (РКИ) с частотой дискретизации для каждого сигнала ТД и сдвинутые во времени относительно друг друга на канальный интервал  . Все эти сигналы объединяются в групповой АИМ сигнал и поступают на кодирующее устройство – кодер К. Кодер каждому из отсчетов ставит соответствующую кодовую комбинацию, предварительно автоматически проквантовав сигнал по уровню.
. Все эти сигналы объединяются в групповой АИМ сигнал и поступают на кодирующее устройство – кодер К. Кодер каждому из отсчетов ставит соответствующую кодовую комбинацию, предварительно автоматически проквантовав сигнал по уровню.
С выхода кодера групповой сигнал в виде кодовых комбинаций подается на устройстве объединения УО, где он объединяется с сигналами управления и взаимодействия СУВ. К этим сигналам относятся вызов, набор номера, отбой и т.д. Кроме того, к УО подводится сигнал цикловой синхронизации СЦС от схемы формирования синхроимпульсов СФСИ, управляемой генератором канальных импульсов ГКИ.
Итак, ИКМ сигнал представляет собой двоичную последовательность импульсов, а совокупность всех канальных интервалов t к, входящих в один период дискретизации ТД, образуют цикл передачи. Эту структуру можно пояснить на принципе работы 30 – канальной системы с ИКМ (рис. 2.8).
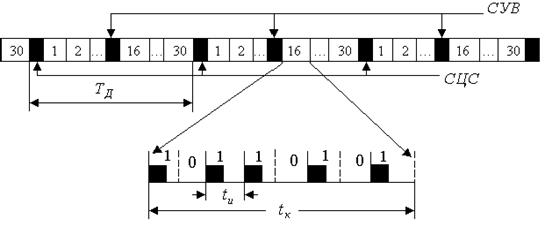
Рис. 2.8
В цикле такой системы тридцать каналов являются информационными, один канал служит для передачи сигналов управления и взаимодействия (СУВ) и еще один канал отводится для передачи сигналов цикловой синхронизации (СЦС). Таким образом, в одном цикле ТД количество канальных интервалов t к равно 32.
Синхронная работа при формировании и обработке сигналов осуществляется генераторным оборудованием, которое содержит ГКИ, РКИ и СФСИ.
Поскольку при передаче по линии связи (ЛС) сигналы могут искажаться, на приемной стороне устанавливаются регенераторы (Р), которые восстанавливают длительность и форму сигналов. Затем эти сигналы подаются на устройство разделения (УР), которое направляет телефонные сигналы, сигналы управления и взаимодействия, а также сигналы цикловой синхронизации в соответствующие ветви оборудования.
Телефонные канальные кодовые группы в декодере (Д) преобразуются в квантованные АИМ сигналы, которые поступают на канальные селекторы (КС), которые осуществляют разделение каналов по времени. С выхода КС сигналы подаются на ФНЧ для восстановления аналоговых сигналов абонентов.
Синхронной работой приемного устройства управляет генераторное оборудование (ГО), которое строго синхронизовано с передающей системой по выделению тактовой частоты F Т и сигнала цикловой синхронизации (СЦС), формирующего моменты начала и конца каждой кодовой группы данного цикла.
В рассмотренной системе ИКМ – ВРК тактовая частота группового сигнала равна
 , (2.5)
, (2.5)
где  - частота дискретизации первичного сигнала;
- частота дискретизации первичного сигнала;
 - суммарное число каналов;
- суммарное число каналов;
m – количество разрядов в кодовых группах.
Для телефонных сигналов в системах с разделением по времени частота дискретизации F Д должна быть больше 2F в, где F в = 3,4 кГц. В аппаратуре ИКМ – ВРК F Д = 8 кГц, ТД = 125 мкс. В системе ИКМ – 30
F Д = 8 кГц, NΣ = 32, m = 8, а F Т = 2048 кГц,  мкс, а
мкс, а  мкс.
мкс.
Полоса частот при передаче группового ИКМ сигнала почти в 2т раз шире, чем в системах с ЧРК.
В отличие от систем ИКМ – ВРК в системах ИКМ – ЧРК дискретизации, квантованию и кодированию подвергается весь групповой сигнал системы с ЧРК, а частота дискретизации определяется верхней частотой группового сигнала. Количество же разрядов т в кодовой группе ограничиваются допустимым уровнем шумов квантования. Цикл передачи в системе ИКМ – ЧРК состоит из одной кодовой группы. Все элементы в цифровой части аппаратуры ИКМ с ВРК и с ЧРК совпадают.
Еще одной разновидностью цифровой системы передачи является система с дельта-модуляцией (ДМ). Использование этой системы предполагает как дискретизацию, так и квантование сигнала по уровню. Однако особенностью здесь является то, что передается не величина приращения сигнала, а только знак этого приращения. В результате в линию связи поступают стандартные импульсы с амплитудой, равной шагу квантования, положительного или отрицательного знака.
2.5.АСИНХРОННЫЕ АДРЕСНЫЕ МНОГОКАНАЛЬНЫЕ СИСТЕМЫ СВЯЗИ
Системы подобного типа предназначены для связи между подвижными объектами на земле и в воздухе. При этом сигналы от всех абонентов могут передаваться в одном и том же диапазоне частот без синхронизации по времени. Для этого каждому абоненту присваивается своя кодовая группа, которая называется адресом. Такие системы называются системами с кодово – адресным разделением. В них в качестве переносчиков используются кодовые группы импульсов, присвоенные разным абонентам.
В асинхронных адресных системах приемное устройство выделяет адрес (кодовую последовательность) только своего абонента и не воспринимает другие сигналы. Сами же адресные последовательности не привязаны к каким бы то ни было временным отсчетам, поэтому такие системы называются асинхронными.
На рис. 2.9 приведена структурная схема асинхронной адресной системы, в которой используется дельта – модуляция и частотно-временное кодирование адреса.
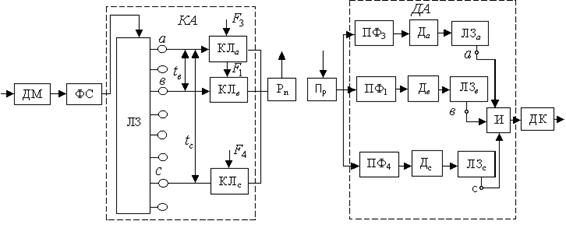
Рис. 2.9
Передающая часть включает в себя дельта-модулятор (ДМ), формирующую схему (ФС), кодер адресов (КА) и передатчик Р n.
Дельта-модулятор преобразует аналоговый сигнал в последовательность двухполярных импульсов с тактовым интервалом ТТ. Формирующая схема положительный импульс преобразует в единицу, а отрицательный – в нуль (рис. 2.10, а).
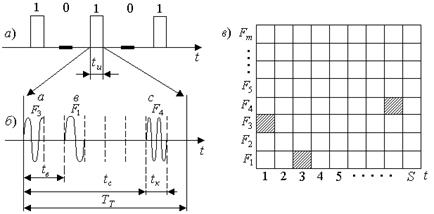
Рис. 2.10
Положительному импульсу (1) в кодере адресов ставится в соответствие кодовая адресная группа с длительностью тактового интервала ТТ (рис. 2.10,б). В этой группе содержится n кодовых интервалов  . Затем в пределах каждой адресной группы формируется последовательность радиоимпульсов длительностью t к с частотами нужного адреса (в данном случае F 3, F 1 и F4). Формирование частотно-временного адреса показано на рис. 2.10,в.
. Затем в пределах каждой адресной группы формируется последовательность радиоимпульсов длительностью t к с частотами нужного адреса (в данном случае F 3, F 1 и F4). Формирование частотно-временного адреса показано на рис. 2.10,в.
На передающей стороне (рис. 2.9) дискретный сигнал с выхода ФС поступает на линию задержки ЛЗ с n отводами, которые соединены с электронными ключами Кла, Клв и Клс, последовательно подключающими к передатчику Р n колебания частот F 3, F 1 и F4 формируемого адреса. При этом радиоимпульс а (F3) фиксирует начало адресной группы, а импульсы в (F1) и с (F4) следуют за импульсом а соответственно через промежутки времени t в и t с.
На приемной стороне продетектированный в радиоприемнике сигнал подается на дешифратор адреса ДА. Здесь с помощью полосовых фильтров ПФ3, ПФ1 и ПФ4 колебания F3, F1 и F4 разделяются на три канала, детектируются в соответствующих детекторах Да, Дв и Дс и превращаются в видеоимпульсы. Далее они поступают на свои линии задержки Лза, Лзв и ЛЗс, и с их выходов подаются на схему совпадения И. Путем выбора соответствующих задержек импульсов а, в и с, они одновременно поступают на вход схемы И и на ее выходе формируется 1. После демодуляции информационный сигнал через схему И поступает к абоненту.
Следует отметить, что при любом другом адресе на выходе схемы И никакой сигнал не появится.
Для вызова другого абонента нужно на передающей стороне просто изменить схему подключения ключей и генераторов частот к отводам линии задержки кодера адресов. Никаких перестроек частот передатчика и приемника при этом производить не нужно. Вот почему асинхронные системы передачи называют системами со свободным доступом.
Опыт показал, что при одновременной работе 50 станций полоса частот линейного тракта должна быть порядка 3 МГц.
КОНТРОЛЬНЫЕ ВОПРОСЫ
Дата добавления: 2019-07-15; просмотров: 522; Мы поможем в написании вашей работы! |

Мы поможем в написании ваших работ!