Структура алгоритма адаптивного управления
Для данной системы управления, в которой свойства холодильной установки можно считать не изменяющимися во времени, т.к. площадь теплопередающей поверхности испарителя не меняется, коэффициент теплопередачи испарителя тоже не меняется во времени. Но так как изменяться во времени может коэффициент теплопередачи продукта, если замораживать различные продукты в каждом цикле охлаждения, а также может изменяться площадь поверхности продукта, если в холодильную камеру загрузили не всю партию продукта, которую она может вместить, а лишь часть ее, необходимо использовать адаптивное управление.
Таким образом, адаптацию можно проводить с каждым циклом охлаждения, зная количество загружаемого продукта в холодильную камеру, т.е. общую площадь теплопередающей поверхности и коэффициент теплопередачи продукта, который зависит от вида продукта. Зная эти данные, можно рассчитать новые коэффициенты в модели объекта, но для достижения максимальной производительности установки, управляющее воздействие должно иметь максимальное значение, т.е. температура в испарителе должна поддерживаться минимальной, не зависимо от свойств продукта и его количества. Поэтому в данном случае алгоритм адаптации будет заключаться лишь в уточнении модели объекта.
Если бы мы имели объект, свойства которого менялись во времени, то к такому объекту можно было бы применить прямой алгоритм адаптации управляющего устройства непосредственно по величине критерия оптимальности.
|
|
|
Положим, что g(t) - полезный задающий сигнал, тогда можно определить рассогласование
 , (1.20)
, (1.20)
где  - выход объекта.
- выход объекта.
Тогда критерий оптимальности можно записать в виде
 (1.21)
(1.21)
Подставив в формулу (1.20) значение j ( t ) можно убедиться, что J 1 = F ( b о ), т.е. является функцией коэффициентов регулятора.
J 1 = F ( b р ) b ® min (1.22)
Другими словами, минимизируя функцию J находим оптимальные коэффициенты регулятора, корректируя которые изменяем управляющее воздействие.
Обобщенная структура системы, реализующей прямой алгоритм адаптации приведена на рисунке 1.7
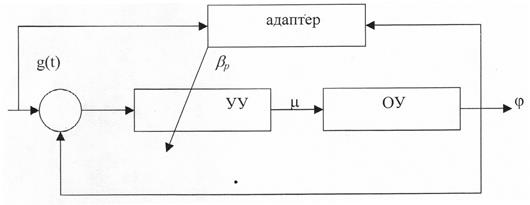
Рисунок 1.7 - Структура адаптивной системы
Под адаптацией подразумевается изменение свойств модели объекта относительно самой системы в процессе протекания технологического процесса. Адаптация происходит следующим образом: на вход управляющего устройства поступает задающий сигнал g(t), после чего снимается значение сигнала на выходе объекта j(t). Адаптер определяет рассогласование e(t) входного и выходного сигнала. Если рассогласование превышает допустимое значение, адаптер изменяет параметры П - регулятора, а именно коэффициент усиления, после чего процесс повторяется.
|
|
|
На рисунке 1.8 приведена блок схема данного алгоритма.
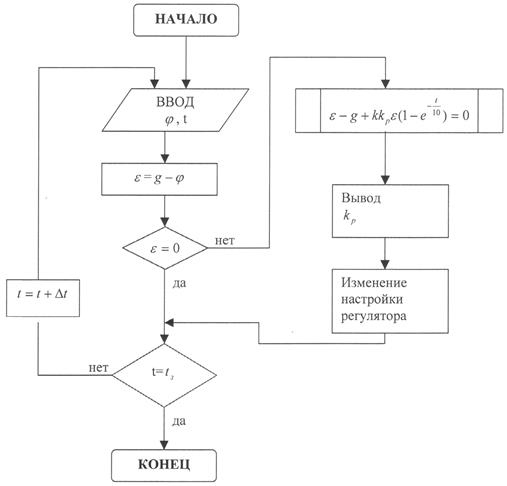
Рисунок 1.8 — Блок-схема прямого алгоритма адаптации
На рисунке 1.8 приведена блок-схема прямого алгоритма адаптации объекта, математическая модель которого может быть представлена дифференциальным уравнением 1-го порядка, а управляющее устройство реализует П - закон регулирования.
Дата добавления: 2019-07-15; просмотров: 97; Мы поможем в написании вашей работы! |

Мы поможем в написании ваших работ!