Проверка устойчивости по критерию Рауса
В данной курсовой работе оценку устойчивости замкнутой системы автоматического регулирования произведем по критерию Рауса так как этот метод не предполагает нахождение определителей, а значит наименее трудоемок. Для проверки устойчивости по критерию Рауса заполним таблицы коэффициентов аналогично таблице 14.
Для системы с П-регулятором составим таблицу 15 подставив в соответствующие ячейки коэффициенты при р из знаменателя передаточной характеристики системы.
Таблица 15
Таблица Рауса для системы с П-регулятором
| 1 | - | An=0,179 | An-2=2,075 | An-4=2,157 |
| 2 | - | An-1=0,884 | An-3=4,176 | An-5=1,975 |
| 3 | Rn=0,202 | c13=1,395 | c23=1,736 | c33=0 |
| 4 | Rn-1=0,719 | c14=3,053 | c24=1,89 | c34=0 |
| 5 | Rn-2=0.422 | c15=0,873 | c25=0 | c35=0 |
| 6 | Rn-3=3,154 | c16=1,89 | c26=0 | c36=0 |
| 7 | Rn-4=0,468 | c17=0 | c27=0 | c37=0 |
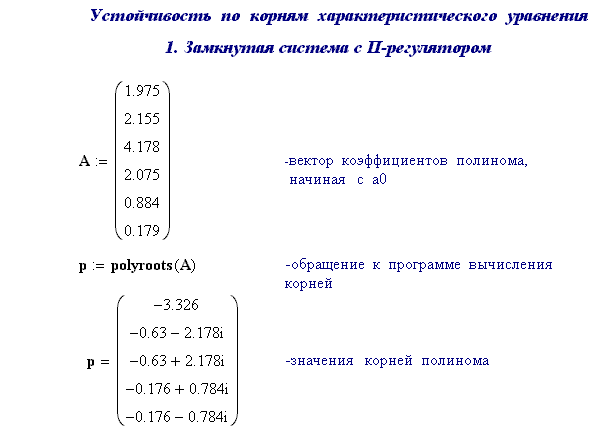
Из таблицы 15 видно, что замкнутая система с П-регулятором устойчива так как выполняется необходимое условие устойчивости по критерию Рауса.
Аналогично составляем таблицы Рауса (табл. 16 и табл. 17) для замкнутых систем автоматического регулирования с И-регулятором и ПИ-регулятором соответственно.
Таблица 16
Таблица Рауса для системы с И-регулятором
| 1 | - | An=0.179 | An-2=2.229 | An-4=3.249 | An-6=0.284 |
| 2 | - | An-1=0.884 | An-3=3.663 | An-5=0.721 | 0 |
| 3 | Rn=0.202 | c13=1.487 | c23=3.103 | c33=0.284 | c43=0 |
| 4 | Rn-1=0.594 | c14=1.819 | c24=0.552 | c34=0 | c44=0 |
| 5 | Rn-2=0.818 | c15=2.651 | c25=0.284 | c35=0 | c45=0 |
| 6 | Rn-3=0.686 | c16=0.357 | c26=0 | c36=0 | c46=0 |
| 7 | Rn-4=7.419 | c17=0.284 | c27=0 | c37=0 | c47=0 |
| 8 | Rn-6=1.258 | c18=0 | c28=0 | c38=0 | c48=0 |
|
|
|
Таблица 17
Таблица Рауса для системы с ПИ-регулятором
| 1 | - | An=0,179 | An-2=2,127 | An-4=2,665 | An-6=0,392 |
| 2 | - | An-1=0,884 | An-3=3,959 | An-5=1,263 | 0 |
| 3 | Rn=0,202 | c13=1,325 | c23=2,409 | c33=0,392 | c43=0 |
| 4 | Rn-1=0,667 | c14=2,352 | c24=1,002 | c34=0 | c44=0 |
| 5 | Rn-2=0,563 | c15=1,845 | c25=0,392 | c35=0 | c45=0 |
| 6 | Rn-3=1,275 | c16=0,502 | c26=0 | c36=0 | c46=0 |
| 7 | Rn-4=3,677 | c17=0,392 | c27=0 | c37=0 | c47=0 |
| 8 | Rn-6=1,28 | c18=0 | c28=0 | c38=0 | c48=0 |
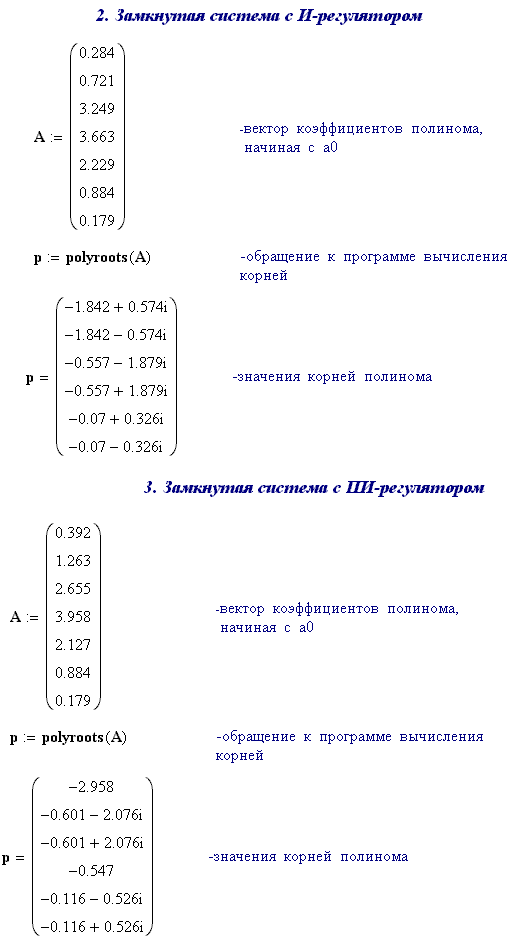
Из таблиц видно, что как система с И-регулятором, так и система с ПИ-регулятором устойчивы. Факт устойчивости систем подтверждает правильность расчета параметров регуляторов, так как этот расчет проводился из условия обеспечения устойчивости системы регулирования.
Проверка устойчивости по корням характеристического уравнения
Ниже приведены результаты проверки устойчивости замкнутых систем по корням характеристического уравнения на ЭВМ в системе MathCad.
Приведение к системе дифференциальных уравнений
Система дифференциальных уравнений устанавливает связь выходной координаты с входными в переходном процессе. То есть если передаточная характеристика системы имеет вид:
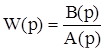
то связь выходной координаты с входной можно записать так:
|
|
|
 .
.
Для приведения к системе дифференциальных уравнений выполняем следующие действия:
- все члены правой части переносим в левую часть и группируем члены с одинаковыми порядками производных:
 ;
;
- формально интегрируем полученное уравнение (порядок уравнения во всех членах уменьшается на 1). Интегрирование выполняется до тех пор, пока не исчезнут все р в левой части.
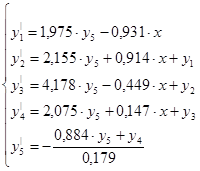
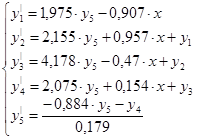
Система с П-регулятором
Передаточной функцией системы автоматического регулирования с П-регулятором по возмущению является найденное ранее выражение:

Тогда в соответствии с вышеизложенным, запишем:

пусть  ;
;

обозначим  , тогда
, тогда





Тогда окончательно система запишется следующим образом:
Передаточная функция системы с П-регулятором по управлению:

Тогда в соответствии с вышеизложенным, запишем нормальную систему:
Система с И-регулятором
Передаточная функция системы с И-регулятором по возмущению:

Тогда в соответствии с вышеизложенным, запишем нормальную систему:
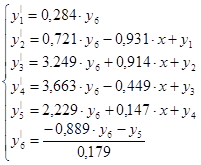
Передаточная функция системы с И-регулятором по управлению:

Тогда в соответствии с вышеизложенным, запишем нормальную систему:
|
|
|

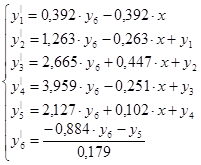
Система с ПИ-регулятором
Передаточная функция системы с ПИ-регулятором по возмущению:

Тогда в соответствии с вышеизложенным, запишем нормальную систему:

Передаточная функция системы с ПИ-регулятором по управлению:

Тогда в соответствии с вышеизложенным, запишем нормальную систему:
Дата добавления: 2019-07-15; просмотров: 264; Мы поможем в написании вашей работы! |

Мы поможем в написании ваших работ!