Расчет коэффициентов передачи
Для статической модели первого порядка коэффициент передачи определяется как производная от выходной величины:
Коэффициент передачи объекта показывает в какую сторону и в какой степени происходит изменение сигнала при прохождении его через объект, то есть усилительные свойства объекта.
Для статической модели первого порядка коэффициент передачи определяется как производная от выходной величины:


Для статической модели второго порядка коэффициент передачи определяется как производная от выходной величины:
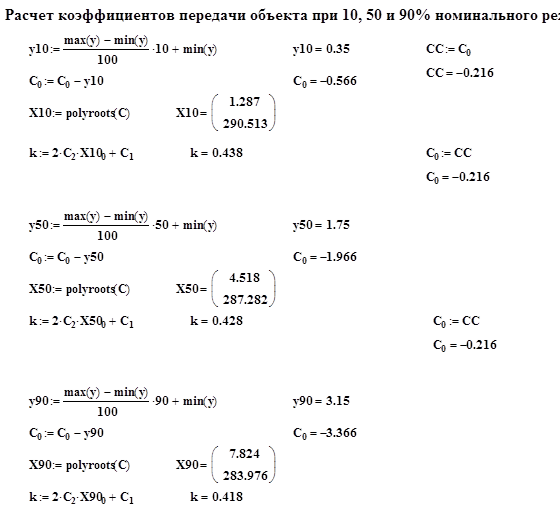
Расчет коэффициентов передачи производим при 10, 50 и 90%

Рассчитаем значение коэффициента передачи при 10 % по формуле:
где  - максимальное установившееся значение сигнала.
- максимальное установившееся значение сигнала.
 - минимальное значение сигнала.
- минимальное значение сигнала.
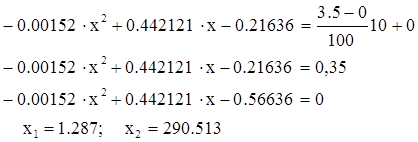
Подставляя полученные данные, получим:

Выбираем х1, т.к только он входит в диапазон экспериментальных значений. Подставим значение х1 в (1.2) и получим значение коэффициента передачи при 10 % номинального режима:
Рассчитаем значение коэффициента передачи при 50 % по формуле:

Подставляя полученные данные, получим:
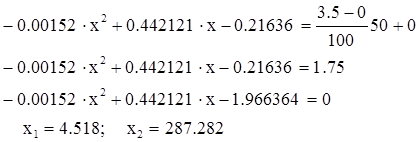
Выбираем х1, т. к только он входит в диапазон экспериментальных значений. Подставим значение х1 в (1.2) и получим значение коэффициента передачи при 50 % номинального режима:


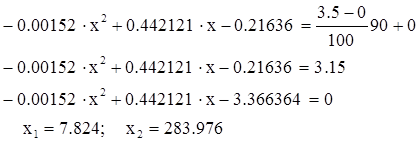
Рассчитаем значение коэффициента передачи при 90 % по формуле:

Выбираем х1, т. к только он входит в диапазон экспериментальных значений. Подставим значение х1 в (1.2) и получим значение коэффициента передачи при 90 % номинального режима:
|
|
|
Результаты расчета сведены в таблицу.
Таблица 4
Коэффициенты передачи.
| 10% | 50% | 90% | |
| х | 1.287 | 4.518 | 7.824 |
| к | 0.438 | 0.428 | 0.418 |
Ниже приведен проверочный расчет коэффициентов передачи объекта на ЭВМ в системе MathCad.
Динамическая модель объекта
Постановка задачи
Динамическая модель связывает изменение входных и выходных величин во времени, то есть отражает протекание переходного процесса.
Для получения динамической характеристики объекта регулирования необходимо выполнить следующие действия:
- задаться рядом значений времени t;
- подав на вход объекта возмущение, для каждого ti зарегистрировать значение выходного сигнала yi.
Полученная, таким образом, динамическая характеристика заданного объекта регулирования, приведена в табл. 5.
Таблица 5
Динамическая характеристика объекта регулирования
| i | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | 10 |
| t | 0 | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 |
| Y | 0 | 0 | 0.5 | 0.71 | 0.8 | 0.91 | 0.98 | 0.99 | 0.995 | 1 |
Для получения аналитической зависимости, заданную таблично динамическую характеристику необходимо аппроксимировать экспоненциальным выражением первого порядка. Затем, по наименьшему значению суммы квадратов отклонений для характеристик без запаздывания и с запаздыванием, нужно выбрать наиболее приближенную к экспериментальным данным динамическую характеристику.
|
|
|
После расчета выполненного вручную следует проверить его на ПЭВМ в системе MathCad, а также произвести расчет динамической характеристики второго порядка и выбрать наиболее точную.
Дата добавления: 2019-07-15; просмотров: 605; Мы поможем в написании вашей работы! |

Мы поможем в написании ваших работ!