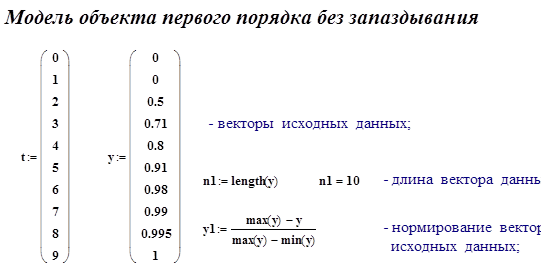
Модель объекта первого порядка без запаздывания
Динамическая модель первого порядка без запаздывания представляет собой неоднородное дифференциальное уравнение первого порядка:
 (2.1)
(2.1)
где T - постоянная времени объекта;
k - коэффициент передачи при 50% номинального режима.
Решением уравнения (2.1) будет экспоненциальная зависимость сигнала на выходе от времени:
 (2.2)
(2.2)
где y0=0 - начальное состояние выхода объекта;
k.x=yуст.=10 - установившееся состояние выхода объекта.
Преобразовав выражение (2.2), получим:
 (2.3)
(2.3)
Обозначим левую часть выражения (2.3) как  . Значения
. Значения  и их натуральные логарифмы приведены в табл. 6.
и их натуральные логарифмы приведены в табл. 6.
Таблица 6
Значения  и
и 
| i | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | 10 |
| yi | 0 | 0 | 0.5 | 0.71 | 0.8 | 0.91 | 0.98 | 0.99 | 0.995 | 1 |

| 1 | 1 | 0.5 | 0.29 | 0.2 | 0.09 | 0.02 | 0.01 | 0.005 | 0 |

| 0 | 0 | -0.693 | -1.238 | -1.609 | -2.408 | -3.912 | -4.605 | -5.298 | -∞ |
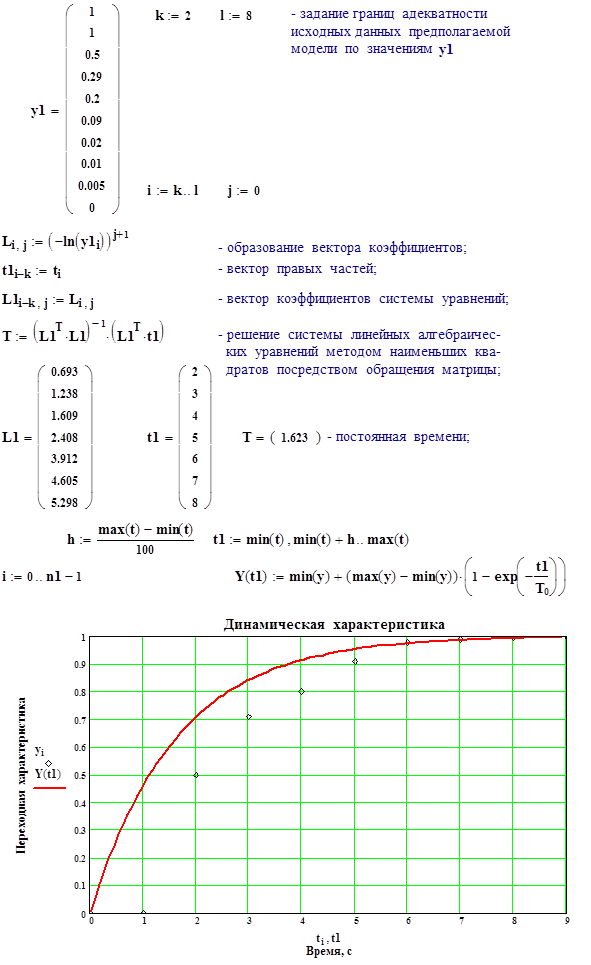
Преобразовав выражение (2.3), получим:

откуда по методу наименьших квадратов найдем постоянную времени:
Таким образом динамическая характеристика первого порядка без запаздывания будет иметь вид:
Вычислим аналитические значения функции, их отклонения от экспериментальных значений, а также квадраты отклонений и сведем их в
Таблица 7
Результаты расчета
| i | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | 10 |
| yi | 0 | 0 | 0.5 | 0.71 | 0.8 | 0.91 | 0.98 | 0.99 | 0.995 | 1 |
| yiанал | 0 | 0.46 | 0.708 | 0.843 | 0.915 | 0.954 | 0.975 | 0.987 | 0.993 | 0.996 |
 yi yi
| 0 | -0.46 | -0.208 | -0.133 | -0.115 | -0.044 | 4.8∙10-3 | 3.4∙10-3 | 2.2∙10-3 | 3.9∙10-3 |

| 0.000 | 0.212 | 0.043 | 0.018 | 0.013 | 1.9∙10-3 | 2.3∙10-5 | 1.1∙10-5 | 4.9∙10-6 | 1.5∙10-5 |
|
|
|
Далее находим сумму квадратов отклонений:
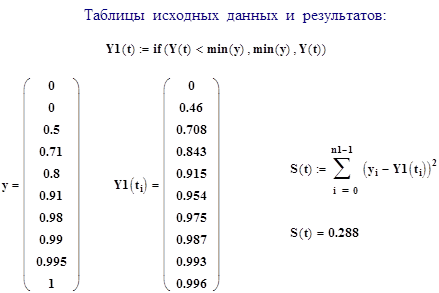
Динамическая модель объекта первого порядка без запаздывания является наименее точной, поэтому ее применение не целесообразно при моделировании динамики объекта. Ниже приведен проверочный расчет динамической модели объекта первого порядка без запаздыванием и модели второго порядка без запаздыванием на ЭВМ в системе MathCad.
Модель объекта первого порядка с запаздыванием
Динамическая модель первого порядка с запаздыванием представляет собой неоднородное дифференциальное уравнение первого порядка:
 (2.4)
(2.4)
где T - постоянная времени объекта;
k - коэффициент передачи при 50% номинального режима;
 - время запаздывания.
- время запаздывания.
Решением уравнения (2.1) будет экспоненциальная зависимость сигнала на выходе от времени:
 (2.5)
(2.5)
где y0=0 - начальное состояние выхода объекта;
k.x=yуст.=10 - установившееся состояние выхода объекта.
|
|
|
Проведем преобразования, аналогичные модели без запаздывания
или запишем в виде системы :
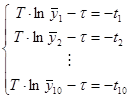 (2.6)
(2.6)
где  берется из табл. 7.
берется из табл. 7.
Так как  ,
,  и
и  , то все уравнения содержащие эти элементы в расчете участвовать не будут.
, то все уравнения содержащие эти элементы в расчете участвовать не будут.
Решим систему (2.6) методом наименьших квадратов. Составим матрицы:
- искомых величин: 
- правой части системы: 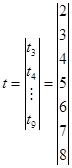
- левой части системы: 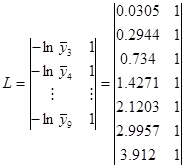
- произведение 
- произведение 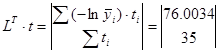
Таким образом получили матричное уравнение:

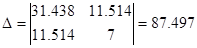
Находим главный определитель:
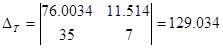
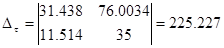
Подставляя матрицу  поочередно в первый и второй столбец матрицы
поочередно в первый и второй столбец матрицы  , находим вспомогательные определители:
, находим вспомогательные определители:
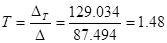
Находим постоянную времени и время задержки:

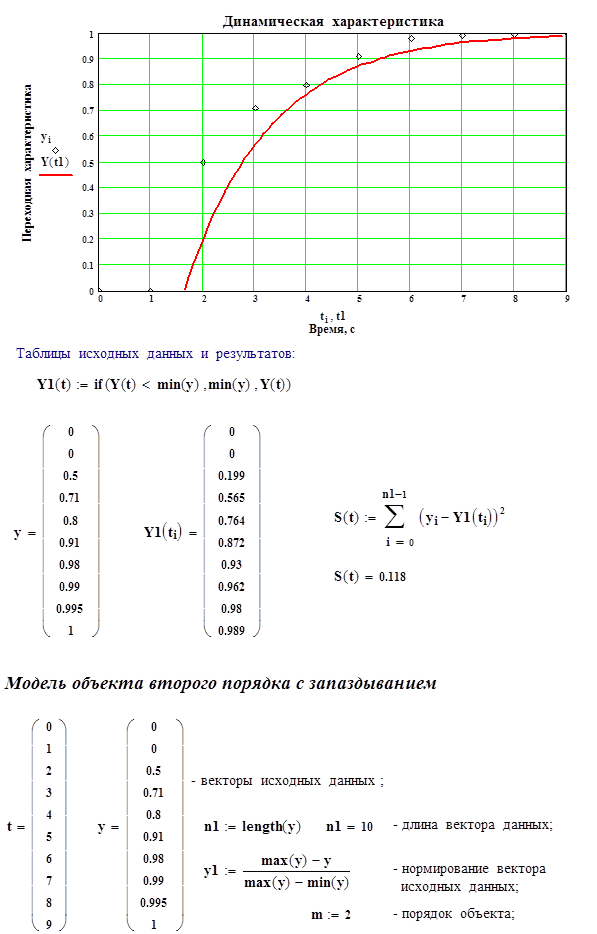
Таким образом динамическая характеристика первого порядка с запаздыванием будет иметь вид:
Вычислим аналитические значения функции, их отклонения от экспериментальных значений, а также квадраты отклонений, причем значения функции при  учитывать не будем. Результаты сведем в табл. 8.
учитывать не будем. Результаты сведем в табл. 8.
Таблица 8
Результаты расчета
| i | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | 10 |
| yi | 0 | 0 | 0.5 | 0,71 | 0,8 | 0,91 | 0,98 | 0,99 | 0,995 | 1 |
| yiанал | 0 | 0 | 0.199 | 0.565 | 0.764 | 0.872 | 0.93 | 0.962 | 0.98 | 0.989 |
 yi yi
| 0 | 0 | 0.301 | 0.145 | 0.036 | 0.038 | 0.05 | 0.028 | 0.015 | 0.011 |
 
| 0 | 0 | 0.090493 | 0.020928 | 0.001291 | 0.001448 | 0.002451 | 0.000769 | 0.00024 | 0.000124 |
|
|
|
Далее находим сумму квадратов отклонений:
 .
.
Так как сумма квадратов отклонений у модели с запаздыванием меньше, чем у модели без запаздывания, то ее использование позволяет более точно описывать протекание переходного процесса.
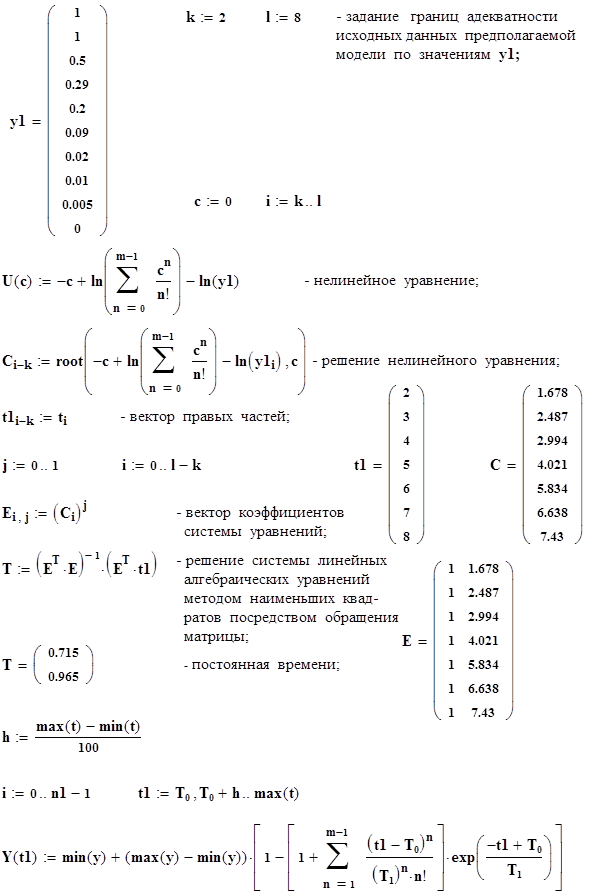
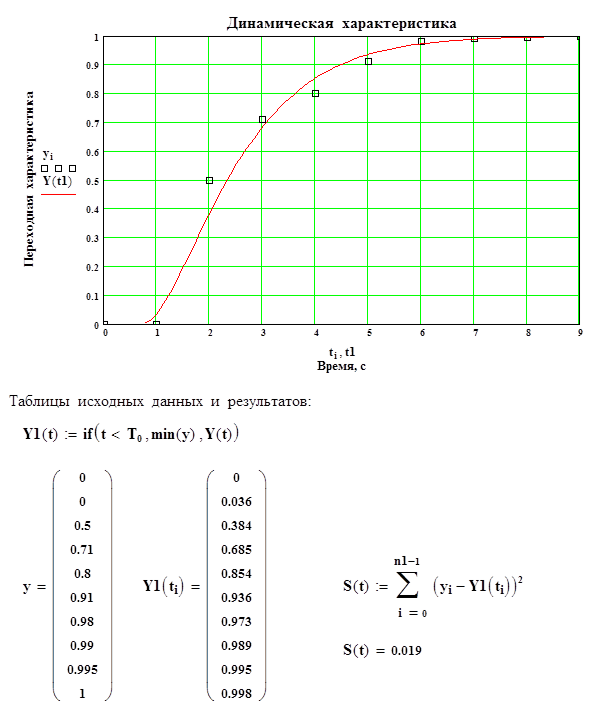
Расчет на ЭВМ моделей более высоких порядков показывает, что наименьшее значение суммы квадратов отклонений будет у модели второго порядка. Поэтому в дальнейших расчетах будем выполнять все действия именно для модели второго порядка.
Ниже приведен проверочный расчет динамической модели объекта первого порядка с запаздыванием и модели второго порядка с запаздыванием на ЭВМ в системе MathCad.

Дата добавления: 2019-07-15; просмотров: 189; Мы поможем в написании вашей работы! |

Мы поможем в написании ваших работ!