Спутниковые навигационные системы
В состав системы входят:
созвездие ИСЗ (космический сегмент);
сеть наземных станций слежения и управления (сегмент управления);
собственно GPS-приемники (аппаратура потребителей).
Космический сегмент
Состоит из 26 спутников (21 основной и 5 запасных), которые обращаются на 6 орбитах (Рис. 1). Плоскости орбит наклонены на угол около 55° к плоскости экватора и сдвинуты между собой на 60° по долготе. Радиусы орбит - около 26 тыс. км, а период обращения - половина звездных суток (примерно 11 ч. 58 мин.). На борту каждого спутника имеется 4 стандарта частоты (два цезиевых и два рубидиевых - для целей резервирования), солнечные батареи, двигатели корректировки орбит, приемо-передающая аппаратура, компьютер.
Передающая аппаратура спутника излучает синусоидальные сигналы на двух несущих частотах: L1=1575,42 МГц и L2=1227,6 МГц. Перед этим сигналы модулируются так называемыми псевдослучайными цифровыми последовательностями (точнее, эта процедура называется фазовой манипуляцией). Причем частота L1 модулируется двумя видами кодов: C/A-кодом (код свободного доступа) и P-кодом (код санкционированного доступа), а частота L2- только P-кодом. Кроме того, обе несущие частоты дополнительно кодируются навигационным сообщением, в котором содержатся данные об орбитах ИСЗ, информация о параметрах атмосферы, поправки системного времени .
Кодирование излучаемого спутником радиосигнала преследует несколько целей:
|
|
|
обеспечение возможности синхронизации сигналов ИСЗ и приемника;
создание наилучших условий различения сигнала в аппаратуре приемника на фоне шумов (доказано, что псевдослучайные коды обладают такими свойствами);
реализация режима ограниченного доступа к GPS, когда высокоточные измерения возможны лишь при санкционированном использовании системы.
Рисунок. 4.Структура передаваемых сигналов.
Код свободного доступа C/A (Coarse Acquisition) имеет частоту следования импульсов (иначе называемых “чипами”) 1,023 МГц и период повторения 0,001 сек., поэтому его декодирование в приемнике осуществляется достаточно просто. Однако точность автономных измерений расстояний с его помощью невысока.
Защищенный код P (Protected) характеризуется частотой следования импульсов 10,23 МГц и периодом повторения 7 суток. Кроме того, раз в неделю происходит смена этого кода на всех спутниках. Поэтому до недавнего времени измерения по P-коду могли выполнять только пользователи, получившие разрешение Министерства обороны США. Однако и это “тайное” стало “явным” в результате утечки секретной информации, после чего к P-коду получил доступ широкий круг специалистов. Американское оборонное ведомство предприняло меры дополнительной защиты P-кода: в любой момент без предупреждения может быть включен режим AS (Anti Spoofing). При этом выполняется дополнительное кодирование P-кода, и он превращается в Y-код. Расшифровка Y-кода возможна только аппаратно, с использованием специальной микросхемы (криптографического ключа), которая устанавливается в GPS- приемнике.
|
|
|
Кроме того, для снижения точности определения координат несанкционированными пользователями предусмотрен так называемый “режим выборочного доступа” SA (Selective Availability). При включении этого режима в навигационное сообщение намеренно вводится ложная информация о поправках к системному времени и орбитах ИСЗ, что приводит к снижению точности навигационных определений примерно в 3 раза.
Поскольку P- код передается на двух частотах (L1 и L2), а C/A-код - на одной (L1), в GPS-приемниках, работающих по P-коду, частично компенсируется ошибка задержки сигнала в ионосфере, которая зависит от частоты сигнала. Точность автономного определения расстояния по P- коду примерно на порядок выше, чем по C/A-коду.
Сегмент управления
Содержит главную станцию управления (авиабаза Фалькон в шт. Колорадо), пять станций слежения, расположенных на американских военных базах на Гавайских островах, островах Вознесения, Диего - Гарсия, Кваджелейн и Колорадо- Спрингс и три станции закладки:острова Вознесения, Диего - Гарсия, Кваджелейн (Рис. 5). Кроме того, имеется сеть государственных и частных станций слежения за ИСЗ, которые выполняют наблюдения для уточнения параметров атмосферы и траекторий движения спутников.
|
|
|
Рисунок 7. Наземные станции слежения за спутниками
Собираемая информация обрабатывается в суперкомпьютерах и периодически передается на спутники для корректировки орбит и обновления навигационного сообщения.
Аппаратура потребителей
В аппаратуре потребителя (GPS-приемнике) принимаемый сигнал декодируется, т.е. из него выделяются кодовые последовательности C/A либо C/A и P, а также служебная информация. Полученный код сравнивается с аналогичным кодом, который генерирует сам GPS-приемник, что позволяет определить задержку распространения сигнала от спутника и таким образом вычислить псевдодальность. После захвата сигнала спутника аппаратура приемника переводится в режим слежения, т.е. в БПС поддерживается синхронизм между принимаемым и опорным сигналами. Процедура синхронизации может выполняться:
|
|
|
по C/A-коду (одночастотный кодовый приемник),
по Р – коду (двухчастотный кодовый приемник),
по C/A-коду и фазе несущего сигнала (одночастотный фазовый приемник),
по Р - коду и фазе несущего сигнала (двухчастотный фазовый приемник).
Используемый в GPS-приемнике способ синхронизации сигналов является едва ли не важнейшей его характеристикой.
Способы наблюдений
Сложная структура сигнала, передаваемого от ИСЗ к приемнику, обусловила многообразие способов его обработки и наблюдений.
Кодовые наблюдения реализуются в самых простых по конструкции GPS-приемниках. Из принятого со спутника сигнала частоты L1 выделяется C/A-код (тогда приемник называется одночастотным) или из частотных сигналов L1 и L2 выделяется P-код (двухчастотный приемник). Производится сравнение соответствующего кода с эталонным кодом, который генерирует сам приемник. Точность определения координат при этом составляет:
для одночастотного (L1) приемника - 100м;
для двухчастотного (L1, L2) приемника - 16м.
Значения точностей приведены для неблагоприятного режима измерений, когда включен режим “ограниченного доступа” SA.
Фазовые наблюдения выполняются для повышения точности измерений. В этом случае при сравнении принятого со спутника сигнала и его эталона, генерируемого в приемнике, учитывается не только код, но и фаза несущей частоты (L1 или L2). Поскольку период несущей частоты в сотни (для P-кода) и тысячи (для C/A-кода) раз меньше периодов кодовых последовательностей, точность процедуры сравнения значительно повышается, а, следовательно, возрастает точность измерения координат. Однако в этом случае возникает проблема целочисленной фазовой неоднозначности, поскольку отсутствует информация о количестве целых периодов информационного сигнала, укладывающихся на пути ИСЗ - приемник. Непосредственно можно измерить только дробную часть фазовой задержки сигнала (в пределах одного периода). Для решения этой проблемы используют несколько способов:
классический двухэтапный метод измерений, который предполагает на первом этапе выполнение большого количества избыточных измерений, а на втором - статистический анализ полученных данных и определение наиболее вероятного значения фазовой неоднозначности;
модификация классического метода, которая отличается тем, что при обработке результатов измерений производится многоэтапная калмановская фильтрация и выбирается группа фильтров Калмана с оптимальными свойствами;
метод замены антенн, когда наблюдения выполняются двумя различными приемниками на двух пунктах в две различные эпохи. При измерениях во вторую эпоху производится замена антенн приемников;
метод определения неоднозначности “в пути”, когда для определения целого числа периодов используют линейные комбинации сигналов L1 и L2 (суммы и разности).
Источники ошибок
На точность определения координат существенное влияние оказывают ошибки, возникающие при выполнении процедуры измерений. Природа этих ошибок различна.
Неточное определение времени. При всей точности временных эталонов ИСЗ существует некоторая погрешность шкалы времени аппаратуры спутника. Она приводит к возникновению систематической ошибки определения координат около 0.6 м.
Ошибки вычисления орбит. Появляются вследствие неточностей прогноза и расчета эфемерид спутников, выполняемых в аппаратуре приемника. Эта погрешность также носит систематический характер и приводит к ошибке измерения координат около 0.6 м.
Инструментальная ошибка приемника. Обусловлена, прежде всего, наличием шумов в электронном тракте приемника. Отношение сигнал/шум приемника определяет точность процедуры сравнения принятого от ИСЗ и опорного сигналов, т.е. погрешность вычисления псевдодальности. Наличие данной погрешности приводит к возникновению координатной ошибки порядка 1.2 м.
Многопутность распространения сигнала. Появляется в результате вторичных отражений сигнала спутника от крупных препятствий, расположенных в непосредственной близости от приемника. При этом возникает явление интерференции, и измеренное расстояние оказывается больше действительного. Аналитически данную погрешность оценить достаточно трудно, а наилучшим способом борьбы с нею считается рациональное размещение антенны приемника относительно препятствий. В результате воздействия этого фактора ошибка определения псевдодальности может увеличиться на 2.0 м.
Ионосферные задержки сигнала. Ионосфера – это ионизированный атмосферный слой в диапазоне высот 50 – 500 км, который содержит свободные электроны. Наличие этих электронов вызывает задержку распространения сигнала спутника, которая прямо пропорциональна концентрации электронов и обратно пропорциональна квадрату частоты радиосигнала. Для компенсации возникающей при этом ошибки определения псевдодальности используется метод двухчастотных измерений на частотах L1 и L2 (в двухчастотных приемниках). Линейные комбинации двухчастотных измерений не содержат ионосферных погрешностей первого порядка. Кроме того, для частичной компенсации этой погрешности может быть использована модель коррекции, которая аналитически рассчитывается с использованием информации, содержащейся в навигационном сообщении. При этом величина остаточной немоделируемой ионосферной задержки может вызывать погрешность определения псевдодальности около 10 м.
Тропосферные задержки сигнала. Тропосфера – самый нижний от земной поверхности слой атмосферы (до высоты 8 – 13 км). Она также обуславливает задержку распространения радиосигнала от спутника. Величина задержки зависит от метеопараметров (давления, температуры, влажности), а также от высоты спутника над горизонтом. Компенсация тропосферных задержек производится путем расчета математической модели этого слоя атмосферы. Необходимые для этого коэффициенты содержатся в навигационном сообщении. Тропосферные задержки вызывают ошибки измерения псевдодальностей в 1 м.
Геометрическое расположение спутников. При вычислении суммарной ошибки необходимо еще учесть взаимное положение потребителя и спутников рабочего созвездия. Для этого вводится специальный коэффициент геометрического ухудшения точности PDOP (Position Dilution Of Precision), на который необходимо умножить все перечисленные выше ошибки, чтобы получить результирующую ошибку. Величина коэффициента PDOP зависит от взаимного расположения спутников и приемника. Она обратно пропорциональна объему фигуры, которая будет образована, если провести единичные векторы от приемника к спутникам. Большое значение PDOP говорит о неудачном расположении ИСЗ и большой величине ошибки. На Рис.5 приведены примеры удачного (а) и неудачного (б) геометрического положения спутников. Типичное среднее значение PDOP колеблется от 4 до 6.
Дифференциальный режим GPS
Наиболее эффективным средством исключения ошибок является дифференциальный способ наблюдений - DGPS (Differential GPS). Его суть состоит в выполнении измерений двумя приемниками: один устанавливается в определяемой точке, а другой - в точке с известными координатами - базовой (контрольной) станции.

| а) | б) |
| Рисунок 8 Пояснение геометрического ухудшения точности PDOP | |
Поскольку расстояние от ИСЗ до приемников значительно больше расстояния между самими приемниками, то считают, что условия приема сигналов обоими приемниками практически одинаковы. А, следовательно, величины ошибок также будут близки. В режиме DGPS измеряют не абсолютные координаты первого приемника, а его положение относительно базового (вектор базы). Использование дифференциального режима позволяет практически полностью исключить влияние режима SA и довести точность кодовых измерений до десятков сантиметров, а фазовых - до единиц миллиметров. Наилучшие показатели имеют фазовые двухчастотные приемники. Они отличаются от фазовых одночастотных более высокой точностью, более широким диапазоном измеряемых векторов баз и большей скоростью и устойчивостью измерений. Однако современные технологические достижения позволяют одночастотным фазовым приемникам по характеристикам приблизиться к двухчастотным.
Одной из особенностей режима DGPS является необходимость передачи дифференциальных поправок от базового приемника к определяемому. При этом различают два метода корректировки информации:
Метод коррекции координат, когда на станции и в определяемой точке наблюдают одни и те же ИСЗ, а затем в качестве дифференциальных поправок с базовой станции передают добавки к измеренным в определяемом пункте координатам. Недостатком этого метода является то, что приемники базового и определяемого пунктов должны работать по одному рабочему созвездию. Это неудобно, поскольку все потребители, использующие дифференциальные поправки должны работать по одним и тем же ИСЗ. В этом случае не обеспечивается наилучшее значение PDOP во всех определяемых пунктах.
Метод коррекции навигационных параметров, при использовании которого на базовой станции определяются поправки к измеряемым параметрам (например, псевдодальностям) для всех спутников, которые потенциально могут быть использованы потребителями. Эти поправки передаются на определяемые пункты, где уже непосредственно в GPS - приемнике вычисляются поправки к координатам. Недостатком этого метода является повышение сложности аппаратуры потребителей.
Метод DGPS может быть использован двояко. Если необходимо вычислять координаты в режиме реального времени, то необходим надежный радиоканал для передачи дифференциальных поправок, а в состав GPS - приемника должен входить радиомодем. Если же передача поправок не выполняется, то можно использовать режим постобработки. В этом случае результаты измерений обоих приемников записываются на устройства памяти приемников (например, магнитные карты), а после прекращения измерений накопленная информация обрабатывается специальным ПО и вычисляется точное значение вектора базы.
Передача дифференциальных поправок по радиоканалу может выполняться по выделенным частотным линиям, на частотах любительских радиостанций, по системам спутниковой связи (например, INMARSAT), а также с использованием технологии передачи цифровых данных RDS (Radio Data System) на частотах FM - радиостанций. Причем иногда даже нет необходимости иметь GPS - приемник на базовой станции, поскольку во многих странах уже действует развитая сеть DGPS - станций, постоянно транслирующих поправки на определенную территорию. Например, в прибрежной зоне Северной Америки, Европы, Австралии и Новой Зеландии развернуты сети радиомаяков для морской DGPS -навигации. Американская корпорация DCI (Differential Corrections Inc.) распространяет дифференциальные поправки на всю континентальную часть США, используя для ретрансляции радиосигналов спутники связи Galaxy. Подобные сети станций действуют и на территориях многих европейских стран.
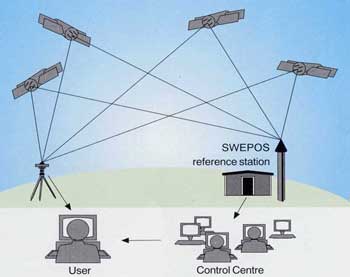
Примером подобной сети может служить шведская сеть станций DGPS, которая носит название SWEPOS. В ее состав входят 21 станция (Reference Station).
Станции равномерно разбросаны по всей территории Швеции (Рис. 9). Координаты точек земной поверхности вычисляются в системе SWEREF 93, которая является шведским вариантом EUREF 89. Система SWEREF 93 с точностью до метра совпадает с WGS 84. Кроме того, точно известны параметры перехода в национальную плановую (RT 90) и высотную (RH 70) системы координат. Система SWEPOS может использоваться как в реальном времени, так и в режиме постобработки. Для определения координат в режиме реального времени (Рис. 7,а) могут использоваться сигналы только двенадцати станций. На этих станциях (SWEPOS reference station) непрерывно производятся GPS-измерения, а их результаты передаются в центр управления (Control Centre). Полученные дифференциальные GPS- поправки передаются пользователям системы на FM – частотах через систему Epos компании 
Teracom (Kaknä s tower) и ретранслятор (P3 transmitter).
Рисунок 9 сеть станций DGPS SWEPOS
При этом достигается точность определения плановых координат на уровне метра. Кроме того, точность зависит от типа сервиса Epos: базовый (Basic) или улучшенный (Premium). Доступ к системе SWEPOS осуществляется по подписке.
Для определения координат точек местности в режиме постобработки (Рис. 9) необходимо иметь данные не менее, чем четырех станций SWEPOS. При этом может быть достигнута сантиметровая точность результатов в координатной системе SWEREF 93. При этом продолжительность измерений двухчастотным приемником должна быть не менее двух часов. Вообще, точность измерений зависит от длительности измерений, типа приемника и антенны, а также программного обеспечения, используемого для обработки данных. Например, при использовании одночастотного фазового приемника можно получить метровую точность результатов при продолжительности измерений порядка нескольких минут. Данные о дифференциальных GPS-поправках, полученные после обработки сигналов всех станций, доступны пользователям (User) спустя 4 часа после окончания измерений. Информация может быть передана с центра управления (Control Centre) через Internet или по каналам модемной связи.
 а)
а)
|  б)
б)
|
Рисунок 10. . Система SWEPOS

Примером глобальной сети DGPS- поправок может служить система OmniSTAR (Рис. 11). Она использует сеть станций (1) для сбора информации об ошибках, вводимых в GPS- сигнал Министерством обороны США.
Рис. 11 система OmniSTAR
Собранные данные распределяются одним из центров управления сетью (4). Всего существует 3 центра управления сетью OmniSTAR по всему миру. Оттуда данные передаются на борт к одному из семи геостационарных спутников (5), распределенных по всей земной поверхности. Далее каждый спутник передает данные о дифференциальных GPS- поправках в пределах своей области обслуживания (6). Сигналы поправок системы OmniSTAR могут быть получены через радиоканал GPS- приемником и доступны по подписке.
Сеть OmniSTAR обладает устойчивостью и избыточностью:
Все станции сбора информации имеют дублированные каналы связи с соответствующим центром управления сетью;
Европейский спутник использует два канала, переключение между которыми осуществляется автоматически;
Европейский континент имеет два уровня обслуживания дифференциальными GPS- поправками;
Формируемые системой OmniSTAR поправки не зависят от какой- либо конкретной станции;
Сигнал системы OmniSTAR сигнал не подвержен влиянию гроз или электрических полей.
Вопросы для самопроверки
1. Космический сегмент
2. Сегмент управления
3. Аппаратура потребителей
4. Способы наблюдений
5. Фазовые наблюдения
6. Источники ошибок
7. Дифференциальный режим GPS
[2.4]
9 Бортовая система приема звуковых сигналов.
Назначение. Система приема звуковых сигналов (СПЗ) - это акустическое электронное навигационное средство, предназначенное для усиления внешних звуковых сигналов и определения направления на их источник. Оно позволяет вахтенному помощнику внутри полностью закрытой рулевой рубки слышать внешние акустические сигналы судов, береговых станций и других объектов.
СПЗ должна устанавливаться на судах с полностью закрытым мостиком. Это определено правилом 19, главы 5 COJIAC. Кроме этого, согласно требованиям ряда классификационных обществ этой системой также должны снабжаться ОМВО-суда.
Минимальные эксплуатационные требования к системе определены Резолюцией ИМО А.694(17). СПЗ должна работать в диапазоне частот 70-И 00 Гц.
Состав. В систему приема звуковых сигналов входит четыре водозащищенных микрофона, соединенные через усилитель с громкоговорителем, индикаторы работы микрофонов,
Усилитель, громкоговоритель, индикаторы работы микрофонов находятся в пульте системы, располагаемом внутри рулевой рубки. Микрофоны устанавливают снаружи рубки на открытом воздухе: два на крыльях мостика, два в ДП (один впереди, другой сзади рубки).
Принцип определения направления. Микрофоны работают в парах. Сигналы от микрофонов на крыльях мостика предназначены
По сигналам микрофонов в диаметральной плоскости судна система устанавливает, по носу или по корме находится источник звука. Если он на носовых курсовых углах, то на пульте системы загорается индикатор переднего микрофона, и наоборот.
Комбинация сигналов от пар микрофонов указывают квадрант, откуда приходит звук.
Вопросы для самопроверки
1. Минимальные эксплуатационные требования к системе
2. Состав.
3. Комбинация сигналов от пар микрофонов
[2]
10 Судовая система ночного видения.
.
Назначение. Система ночного видения -СИВ(Nightvisionsystem) предназначена для повышения безопасности вождения судов в ночных условиях. Ее основная задача заключается в помощи судоводителям избежать опасных столкновений с посторонними объектами на поверхности воды. Эта система позволяет обнаруживать неосвещенные объекты и предметы, которые могут не наблюдаться по PJIC(малые шлюпки, льдины, бревна, упавшего за борт человека и др.). СИВ может применяться и для идентификации обнаруженных по PJICобъектов, для просмотра мертвой зоны РЛС. Кроме ночной (инфракрасной) камеры, эта система обычно имеет и дневную видеокамеру. Дневная видеокамера может использоваться для рассмотрения отдельных объектов и для их съемки в светлое время суток.
для определения борга прихода акустического сигнала. Если источник звука справа, то на пульте системы загорается индикатор микрофона правого бор га, и наоборот.
Система ночного видения оказывает существенную помощь на высокоскоростных пассажирских паромах в районах нахождения большого числа малых прогулочных и рыболовных судов. Установка СИВ на этих паромах требуется, например, Гонконгским морским департаментом.СИВ может применяться также на пограничных кораблях, на поисковых и спасательных судах, на береговой станции для контроля акватории порта в ночное время.
Состав системы. СИВ включает электронно-оптический модуль (интегрированную видеокамеру), блок разворота видеокамеры по азимуту и высоте, электронный блок, панель управления и дисплей.
Спутниковый компас
Принцип определения курса в спутниковом компасе. С помощью средне орбитальных навигационных спутниковых систем можно получать информацию не только о координатах и составляющих путевой скорости судна, но также и о его курсе. С этой целью используются двух или трех антенные системы. В принципе для получения курса необходимо только две антенны. Третья антенна позволяет вместе с курсом судна определить углы килевой, бортовой качки и улучшить точность измерения курса, уменьшив негативное влияние на нее качки и рыскания.

Вид трех антенной системы представлен на рис. 3.5. Диаметр окружности, проходящей через антенны А;, АА3, приблизительно равен одному метру.
Рисунок 12, Трех антенная система спутникового компаса.
Допустим, две антенны Aj, А2 спутниковой системы GPSрасположены в диаметральной плоскости судна (рис.3.6). Расстояние между антеннами bсоставляет порядка 85 см.
Передача сигналов навигационными искусственными спутниками Земли (НИСЗ) в системе GPSпроизводится на двух частотах:
F/=1575,42 и F2=1227,60 МГц. Режим излучения - непрерывный с псевдошумовой модуляцией. Навигационные сигналы представляют собой защищенный Р-код (precisioncode), которым модулируются частоты Fl, F2,и общедоступный С/А-код (coarseandacquisitioncode), которым модулируется только частотаF1.
В бортовой аппаратуре GPS для судов коммерческого флота используется только общедоступный С/А-код на частотеF1.Длина волны этой несущей частоты составляет приблизительно 19 см.
При определениях положения, по координатам места судна и по эфемеридам спутников всегда могут быть рассчитаны горизонтные координаты НИСЗ: высотаhsи азимутAs. На рис. 3.6 эти координаты показаны для одного из спутников.
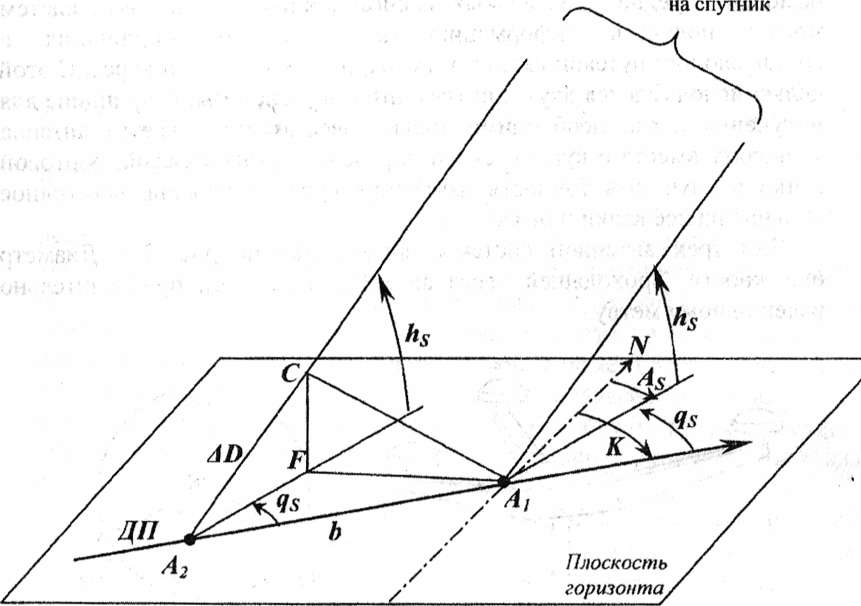
Рисунок 13. К характеристике принципа работы спутникового компаса.
Расстояния, которые проходит сигнал с определенного спутника до антенн А/, А2, отличаются на величинуAD.Эту разность расстояний можно найти, измерив сдвиг фаз АФ несущего сигнала, принимаемого антеннами А,, А2:
АФ = Ац/ + п,
где п - целое число циклов, Л у/ - дробная часть цикла.
Фазовым измерениям присуща многозначность, поэтому измеряется только А^, а п должно быть определено по дополнительным данным.
По значению ЛФ величинаADнаходится по формуле:
AD= ДА Ф,
где X—длина волны несущего сигнала.
ЗнаяADи высотуhsспутника над истинным горизонтом, можно найти курсовой угол qsспутника и истинный курс судна К:
AfF
А2F= А£) coshs; g9=arccos—-;К = As- qs. b
Значение курса определяется по всем спутникам, находящимся над горизонтом, и усредняется.
Для вычисления координат объекта по навигационным сигналам спутников GPSв трехмерном пространстве необходимо измерить дистанции не менее чем до 4-х, а при двухмерной навигации - не менее чем до 3-х спутников. Для получения добавочно к координатам истинного курса объекта, число спутников, до которых измеряются расстояния, должно быть на один больше, так как количество определяемых параметров увеличивается на единицу. Кроме координат и постоянной погрешности расстояния здесь требуется также найти значение целого числа циклов п.
Для случаев, когда сигналы спутников GPSмогут быть блокированы высокими зданиями, или мостами, под которыми проходит судно, спутниковый компас снабжается свободным гироскопом. По параметрам углового положения его оси обеспечивается выработка значений курса в те короткие промежутки времени, когда не поступают сигналы от спутников. Кроме того, названный гироскоп применяется для уменьшения влияния качки и рыскания на точность показаний курса.
Состав аппаратуры спутникового компаса и его характеристики. В состав спутникового компаса входит:
три антенны, помещенные на жесткой с высокой точностью установленной платформе; основной модуль; устройство управления и отображения.
В основном модуле располагаются приемник GPS, свободный гироскоп, процессор.
Спутниковый компас предоставляет информацию о координатах судна, курсе, путевом угле, путевой скорости, углах бортовой и килевой качки.
Устройство управления и отображения спутникового компаса фирмы "Funmo" показано на рис. 3.7. Этот спутниковый компас может отображать данные в трех формах, предназначенных для: - управления судном рулевым (курс, подвижная картушка с неподвижным индексом курса, путевая скорость, путевой угол, углы килевой и бортовой качки),
навигационных целей (дата, время, координаты места судна, путевая скорость и путевой угол);
указания направления диаметральной плоскости судна (дата, время, курс, нугевая скорость и путевой угол).
Рисунок 14. Устройство отображения спутникового компаса фирмы "Furuno".
Спутниковый компас может передавать информацию о курсе судна в такие устройства, как РЛС, САРП, авторулевой, транспондер АИС, ECDISи в другую аппаратуру. Он имеет такие характеристики:
Средняя квадратическая погрешность (СКП) показаний курса - ±0,5°;
СКП показаний угла бортовой (килевой) качки - ±0,5°;
•.. Точное слежение за курсом при скорости поворота - до 25 °/с;
Время прихода в готовность после включения - 4 мин;
95% погрешность определения места судна по GPS- ±10 м;
95% погрешность определения места судна по DGPS- ±5 м;
Интерфейс - МЭК 61162.
На работу спутникового компаса не влияют скорость судна, ускорения, изменение широты, геомагнетизм.
Основной его недостаток по сравнению с ГК - неавтономность.
Дата добавления: 2019-02-26; просмотров: 1126; Мы поможем в написании вашей работы! |

Мы поможем в написании ваших работ!