Механизмы качающегося конвейера
Качающийся конвейер (рисунок 5.9) предназначается для перемещения материала (сыпучего или штучного) в горизонтальном направлении. Конвейер имеет два исполнительных механизма: основной механизм транспортировки материала и механизм подачи материала на конвейер.
Подача материала из бункера 9 на желоб 5 осуществляется при помощи механизма подачи, состоящего из кулачка 7 и заслонки (толкателя) 8. Кулачок получает движение от вала кривошипа 1через цепную передачу 12 с передаточным отношением u 17 равным единице.
Механизм транспортировки механизма имеет желоб 5 с ролико-катковыми опорами 6, совершающий возвратно-поступательное движение. Движение желобу 5 передается от электродвигателя 10 через планетарный редуктор 11, зубчатую передачу z5-z6 и шестизвенный механизм O1ABO2CD, включающий в себя два кривошипа 1 и 3 и два шатуна 2 и 4. Роль ведущего кривошипа выполняет маховик 1 с размещенным на нем пальцем кривошипа A. В кривошипно-ползунном механизме O2CD ведомый кривошип 3 вращается неравномерно и с помощью шатуна 4 сообщает желобу 5 возвратно-поступательное движение с несимметричным законом изменения ускорения. Желоб при своем движении увлекает за счет сил трения насыпанный в него материал, сообщая ему скорость. Движение материала с желобом возможно в том случае, если будет соблюдаться определенное соотношение между силой трения Fм и ускорением а желоба и материала:
Fм = Gм fп ≥ a·Gм/g,
где fп – коэффициент трения покоя между материалом и желобом.
В случае, когда ускорение a желоба будет превышать критическое значение a = fп g , будет иметь место движение материала относительно желоба за счет накопленной ранее кинетической энергии. В этот период между материалом и желобом возникнет сила трения скольжения
Fм = Gм fα,
где fα – коэффициент трения скольжения между материалом и желобом.
Сила Fм обуславливает равнозамедленное движение материала до момента выравнивания скоростей материала и желоба.
Исходные данные для проектирования механизмов автомобиля повышенной проходимости приведены в таблице 5.9. Схемы планетарных зубчатых механизмов приведены в приложении A. Кинематические графики движения кулачковых механизмов приведены в приложении Б.
| | |||||
 | |||||
| |||||
Рисунок 5.9 – Механизмы качающегося конвейера
| |
| Параметры | Обозн. | Ед. изм. | Варианты | |||||||||
| 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | 10 | |||
| Размеры звеньев рычажного механизма | lO1A | м | 140 | 150 | 160 | 170 | 180 | 190 | 200 | 130 | 140 | 145 |
| lCD | м | 700 | 750 | 720 | 680 | 720 | 720 | 800 | 600 | 660 | 620 | |
| x | м | 40 | 50 | 45 | 50 | 45 | 55 | 80 | 50 | 50 | 55 | |
| y | м | 20 | 25 | 30 | 32 | 35 | 38 | 50 | 30 | 32 | 36 | |
| Ход ползуна | Н | м | 220 | 250 | 260 | 300 | 300 | 310 | 350 | 200 | 210 | 290 |
| Массы звеньев рычажного механизма | m2 | кг | 25 | 28 | 330 | 20 | 28 | 20 | 25 | 20 | 18 | 15 |
| m3 | кг | 30 | 35 | 40 | 25 | 50 | 25 | 30 | 28 | 20 | 20 | |
| m4 | кг | 100 | 120 | 120 | 80 | 100 | 70 | 100 | 90 | 80 | 68 | |
| m5 | кг | 200 | 220 | 240 | 200 | 210 | 160 | 180 | 190 | 200 | 200 | |
| Диаметр цапф | dц | мм | 40 | 50 | 60 | 60 | 50 | 60 | 50 | 40 | 40 | 40 |
| Частота вращения двигателя | nдв | мин-1 | 960 | 880 | 960 | 850 | 880 | 720 | 660 | 870 | 730 | 850 |
| Частота вращения кривошипа 1 | n1 | мин-1 | 60 | 55 | 60 | 65 | 55 | 60 | 60 | 68 | 64 | 62 |
| Тип толкателя | - | - | I | I | II | III | I | I | II | III | I | I |
| Рабочий угол кулачка | φр | град. | 150 | 180 | 200 | 190 | 300 | 320 | 310 | 210 | 280 | 270 |
| Ход толкателя (угловой ход коромысла) | h (β) | мм (град.) | 25 | 28 | 20 | 30 | 24 | 26 | 25 | 22 | 20 | 32 |
| Длина коромысла | l | мм | - | - | 220 | - | - | - | 240 | - | - | - |
| Допускаемый угол давления | αдоп | град. | 30 | 30 | 45 | 0 | 35 | 38 | 40 | 0 | 30 | 30 |
| Номер кинематического графика | - | - | 24 | 1 | 23 | 2 | 22 | 3 | 21 | 4 | 20 | 5 |
| Номер редуктора | - | - | 8 | 2 | 3 | 4 | 9 | 8 | 4 | 2 | 3 | 4 |
| Число зубьев колес передачи | z5 | - | 10 | 14 | 13 | 11 | 13 | 15 | 12 | 14 | 14 | 10 |
| z6 | - | 25 | 28 | 31 | 24 | 26 | 24 | 22 | 32 | 20 | 25 | |
| Модуль зубчатых колес | m | мм | 4 | 2,5 | 2,5 | 2,5 | 2 | 3 | 4 | 5 | 4 | 5 |
| Знак передаточного отношения редуктора | - | - | + | - | + | - | - | + | - | - | + | - |
Механизмы вытяжного пресса
Вытяжной пресс предназначается для холодной калибровки. Высадочный механизм 1, 2, 3, 4, 5 является кривошипно-коромысловым.
Высадочный ползун 5 с закрепленным на нем захватом, совершая по вертикали возвратно поступательное движение, осуществляет деформацию заготовки. Диаграмма усилий вытяжки представлена на рисунке 5.10, а.
Кривошип 1 приводится от электродвигателя через планетарный редуктор и зубчатую передачу z5-z6. На одном валу с колесом z6 жестко закреплен кривошип и кулачок кулачкового механизма (рисунок 5.10, б).
Исходные данные для проектирования механизмов автомобиля повышенной проходимости приведены в таблице 5.10. Схемы планетарных зубчатых механизмов приведены в приложении A. Кинематические графики движения кулачковых механизмов приведены в приложении Б.
| |||
 | |||
|

|
|
|
|
|

а – рычажный механизм перемещения ползуна с пуансоном и график изменения усилия вытяжки; б – схема кулачкового механизма зажимного устройства
Рисунок 5.10 – Механизмы вытяжного пресса
| |
| Параметры | Обозн. | Ед. изм. | Варианты | |||||||||
| 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | 10 | |||
| Размеры звеньев рычажного механизма | lO1A | м | 0,55 | 0,77 | 0,33 | 0,6 | 0,49 | 0,7 | 0,6 | 0,51 | 0,5 | 0,66 |
| l АВ | м | 0,53 | 0,74 | 0,32 | 0,62 | 0,47 | 0,6 | 0,58 | 0,50 | 0,46 | 0,63 | |
| lO2В | м | 0,22 | 0,30 | 0,13 | 0,20 | 0,20 | 0,30 | 0,24 | 0,21 | 0,18 | 0,26 | |
| lO2С | м | 0,15 | 0,21 | 0,09 | 0,15 | 0,14 | 0,18 | 0,17 | 0,16 | 0,10 | 0,18 | |
| lCD | м | 0,91 | 1,28 | 0,55 | 1,00 | 0,82 | 0,85 | 1,10 | 0,90 | 0,80 | 1,20 | |
| x | м | 0,03 | 0,04 | 0,02 | 0,04 | 0,02 | 0,03 | 0,03 | 0,02 | 0,02 | 0,04 | |
| y | м | 0,10 | 0,15 | 0,06 | 0,15 | 0,09 | 0,10 | 0,11 | 0,10 | 0,09 | 0,12 | |
| Частота вращения двигателя | nдв | мин-1 | 960 | 940 | 940 | 950 | 960 | 720 | 730 | 1430 | 1450 | 1440 |
| Частота вращения кривошипа 1 и кулачка | n1 = nк | мин-1 | 40 | 42 | 50 | 60 | 55 | 45 | 40 | 65 | 62 | 100 |
| Массы звеньев рычажного механизма | m1 | кг | 60 | 80 | 40 | 65 | 55 | 75 | 65 | 58 | 55 | 70 |
| m2 | кг | 30 | 35 | 20 | 32 | 22 | 40 | 35 | 30 | 28 | 35 | |
| m4 | кг | 65 | 75 | 40 | 60 | 45 | 75 | 70 | 60 | 55 | 65 | |
| m5 | кг | 45 | 50 | 30 | 42 | 52 | 55 | 45 | 48 | 32 | 48 | |
| Максимальное усилие вытяжки | Fmax | кН | 45 | 55 | 30 | 42 | 38 | 60 | 50 | 54 | 48 | 57 |
| Модуль зубчатых колес планетарной ступени редуктора | m1 | мм | 5 | 6 | 3 | 4 | 4 | 6 | 5 | 5 | 5 | 6 |
| Числа зубьев колес простой передачи | z5 | - | 12 | 13 | 15 | 14 | 14 | 12 | 14 | 15 | 13 | 12 |
| z6 | - | 20 | 22 | 30 | 28 | 32 | 18 | 26 | 30 | 22 | 20 | |
| Модуль зубчатых колес z5 и z6 | m | мм | 6 | 7 | 4 | 5 | 5 | 7 | 6 | 6 | 6 | 7 |
| Ход толкателя (угловой ход коромысла) | h ( β ) | мм (град.) | 20 | 25 | 15 | 30 | 18 | 22 | 28 | 20 | 30 | 16 |
| Фазовые углы поворота кулачка, φвв = 0 | φп = φо | град. | 45 | 50 | 40 | 60 | 55 | 45 | 50 | 60 | 40 | 45 |
| Допускаемый угол давления | αдоп | град. | 0 | 27 | 30 | 0 | 28 | 26 | 0 | 30 | 25 | 0 |
| Тип толкателя кулачкового механизма | - | - | III | II | I | III | II | I | III | II | I | III |
| Длина коромысла | l | мм | - | 120 | - | - | 140 | - | - | 100 | - | - |
| Номер кинематического графика | - | - | 24 | 23 | 22 | 21 | 20 | 10 | 11 | 12 | 13 | 14 |
| Номер планетарного редуктора | - | - | 11 | 10 | 9 | 8 | 7 | 6 | 5 | 4 | 3 | 2 |
| Диаметр цапф | dц | мм | 50 | 40 | 45 | 40 | 30 | 60 | 50 | 40 | 30 | 35 |
| Коэффициент трения | f | - | 0,1 | 0,15 | 0,18 | 0,16 | 0,17 | 0,12 | 0,1 | 0,12 | 0,13 | 0,11 |
Приложение A
Схемы планетарных зубчатых механизмов приведены на рисунках А.1…А.3.



Рисунок А.1 – Схемы планетарных зубчатых механизмов с номерами 1…3
| |




Рисунок А.2 – Схемы планетарных зубчатых механизмов с номерами 4…7




Рисунок А.3 – Схемы планетарных зубчатых механизмов с номерами 8…11
Приложение Б
Кинематические графики движения кулачковых механизмов приведены на рисунках Б.1…Б.3.

Рисунок Б.1 – Кинематические графики движения кулачковых механизмов
с номерами 1…8
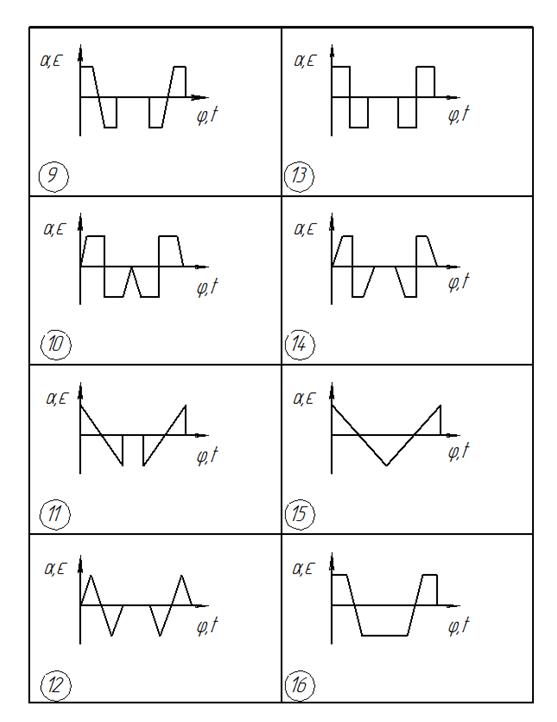
Рисунок Б.2 – Кинематические графики движения кулачковых механизмов с номерами 9…16

Рисунок Б.3 – Кинематические графики движения кулачковых механизмов с номерами 17…24
Список литературы
1. Борисенко Л.А. Теория механизмов, машин и манипуляторов: учебное пособие / Л.А. Борисенко. – Минск: Новое знание; 2013. – 285 с.: ил.
2. Теория механизмов и машин. Курсовое проектирование: Учебное пособие / А.И. Смелягин. - М.: НИЦ ИНФРА-М, 2014. - 263 с.
3. Теория механизмов и механика машин: учебник / Под ред. К.В. Фролова. – 5-е изд., перераб. и доп. – М.: Высш. Шк., 2005. – 496 с.: ил.
4. Попов С.А. Курсовое проектирование по теории механизмов и машин. – М.: Высш. шк., 1986. – 294 с.
5. Девойно Г.Н. Курсовое проектирование по теории механизмов и машин. – Мн.: Выш. шк., 1986. –285 с.
6. Синтез и кинематический анализ рычажных механизмов: метод. указания / Сост. В.Л. Комар. – Могилев: Белорус.–Рос. ун-т, 2005. – 26 с.
7. Теория механизмов и машин: метод. указания к курсовой работе для студентов специальности 1-37 01 02 «Автомобилестроение» в двух частях/ Сост. О.В. Пузанова. – Могилев: Белорус.–Рос. ун-т, 2010. – 60 с.
8. Силовой анализ механизмов: метод. указания / Сост. В.Л. Комар. – Могилев: Белорус.–Рос. ун-т, 2005. – 31 с.
9. Проектирование и кинематическое исследование зубчатого механизма: метод. указания / Сост. В.Л. Комар. – Могилев: Белорус.–Рос. ун-т, 2004. – 19 с.
10. ГОСТ 16532-70. Передачи зубчатые цилиндрические эвольвентные внешнего зацепления. Расчет геометрии. – М.: Изд-во стандартов, 1971. – 42 с.
11. Проектирование кулачкового механизма: метод. указания / Сост. В.Л. Комар. – Могилев: Белорус.–Рос. ун-т, 2005. – 26 с.
Дата добавления: 2019-01-14; просмотров: 885; Мы поможем в написании вашей работы! |

Мы поможем в написании ваших работ!