Построение проектируемой зубчатой передачи
Проектируемую зубчатую передачу строят следующим образом:
1) Откладываем межосевое расстояние  и проводим окружности
и проводим окружности  , делительные
, делительные  , и основные
, и основные  , окружности вершин
, окружности вершин  , и впадин
, и впадин  ,
,
Начальные окружности касаются в полюсе зацепления. Расстояние между делительными окружностями по осевой линии равно  . Расстояние между окружностями вершин одного колеса и окружностями впадин другого, измеренное по оси, равно
. Расстояние между окружностями вершин одного колеса и окружностями впадин другого, измеренное по оси, равно  .
.
2) Через полюс зацепления касательной к основным окружностям колес проводим линию зацепления. В точке касания N1 и N2 называются предельными точками линии зацепления. Буквами В1 и В2 отмечена активная линия зацепления, точка В1 – точка начала зацепления, точка В2 - точка конца зацепления.
Зубья шестерни копируем из построения станочного зацепления, а зубья зубчатого колеса получаем графическим построением.
Построение зубчатого зацепления представлено на листе №3.
Проектирование планетарного редуктора
Исходные данные для проектирования
 – число сателлитов в планетарном редукторе
– число сателлитов в планетарном редукторе
 - передаточное отношение планетарного редуктора
- передаточное отношение планетарного редуктора
Расчет планетарного редуктора
Уравнение передаточного отношения :

Условие соосности:
Условие сборки:
, где П – дополнительное произвольное число оборотов водила при сборке, а Ц – любое целое число.
Условие соседства при  :
:
Решение проводим методом перебора, используя компьютерную программу. Ее текст представлен в приложении №2.
Получившееся число зубьев

Графические построения, соответствующие разделу 4, приведены на листе №3.
ПРОЕКТИРОВАНИЕ КУЛАЧКОВОГО МЕХАНИЗМА
Исходные данные для проектирования
Схема механизма – плоский кулачковый механизм с роликовым поступательным толкателем с силовым замыканием с помощью пружины;
 - ход толкателя
- ход толкателя
 - допустимый угол давления
- допустимый угол давления
 - угол рабочего профиля кулачка
- угол рабочего профиля кулачка
 - угол дальнего стояния толкателя
- угол дальнего стояния толкателя

Построение кинематических диаграмм
В качестве исходной кинематической диаграммы задана диаграмма второй передаточной функции в относительных величинах. Диаграммы  и
и  получают после интегрирования диаграммы
получают после интегрирования диаграммы  . Интегрирование производилось в среде MathCad.
. Интегрирование производилось в среде MathCad.
Кинематические диаграммы передаточных функций представлены на рис.5.1
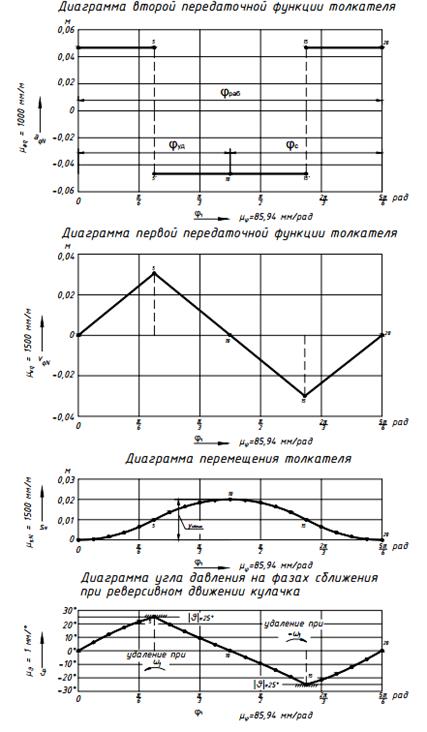
Рис. 5.1
Определение основных размеров кулачкового механизма
К основным размерам плоского кулачкового механизма с роликовым поступательно движущимся толкателем относятся: радиус начальной шайбы центрового профиля  , радиус ролика
, радиус ролика  и эксцентриситет толкателя
и эксцентриситет толкателя  .
.
По диаграммам  и
и  строится диаграмма
строится диаграмма  .
.
Диаграмма строится в прямоугольной системе координат. При построении этой диаграммы необходимо масштабы по осям абсцисс и ординат принять одинаковыми.
В нашем случае 
· По фазовому портрету определяем эксцентриситет:

· С помощью диаграммы по допустимому углу давления определяют радиус начальной шайбы кулачка

· По условиям равномерности износа и контактной прочности радиус ролика по отношению к радиусу начальной шайбы кулачка должен удовлетворять условию:
Примем 
Дата добавления: 2018-11-24; просмотров: 216; Мы поможем в написании вашей работы! |

Мы поможем в написании ваших работ!