Формирование динамической модели
Для того, чтобы упростить определение закона движения, реальный механизм заменяют динамической моделью (рис.2.3)
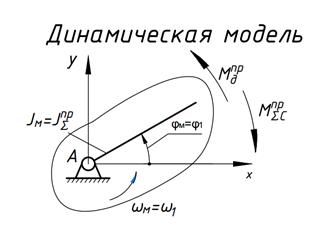
Рис.2.3
Динамическую модель рассматриваемой системы представляют в виде вращающегося звена, называемого звеном приведения, инерционность которого определяется суммарным приведенным моментом  . На звено приведения действует суммарный приведенный момент сил
. На звено приведения действует суммарный приведенный момент сил  . Параметры динамической модели
. Параметры динамической модели  и
и  определяют таким образом, чтобы закон движения динамической модели совпадал с законом движения начального звена.
определяют таким образом, чтобы закон движения динамической модели совпадал с законом движения начального звена.
Приведение сил
1) Определим приведенные моменты сил сопротивления: сил тяжести 2 и 3 звеньев и силы F, приложенной к точке Е.
2) Суммарный приведенный момент сил сопротивления будет представлять сумму моментов от каждой силы сопротивления по отдельности:

Графики моментов сил сопротивления, движущих сил и суммарного приведенного момента представлены на рис.2.4
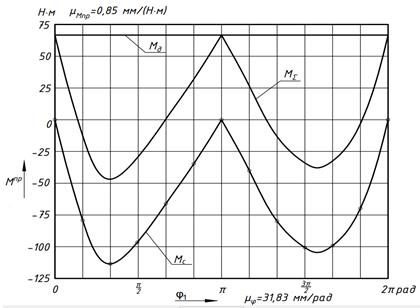
Рис.2.4
Приведение масс
1) Приведенный момент инерции второй группы звеньев рассчитывают с учетом только массы 2 и 3 звеньев.

2) Моменты инерции 2 и 3 звеньев относительно центра масс:
|
|
|

3) Тогда приведенный момент инерции второй группы звеньев равен:

Значения приведенного момента инерции второй группы звеньев для каждого из 12 положений приведены в таблице
Таблица 2.3 Приведенный момент инерции второй группы звеньев
| Наименование | Величина | ||||||||||||
| Угол, град | 0 | 30 | 60 | 90 | 120 | 150 | 180 | 210 | 240 | ||||
|
| 0,017 | 0,051 | 0,097 | 0,077 | 0,044 | 0,023 | 0,017 | 0,033 | 0,066 | ||||
|
|
| ||||||||||||
| 270 | 300 | 330 | 360 | ||||||||||
| 0,085 | 0,077 | 0,046 | 0,017 | ||||||||||
 кг·м2
кг·м2
График приведенного момента инерции второй группы звеньев представлен на рис.2.5
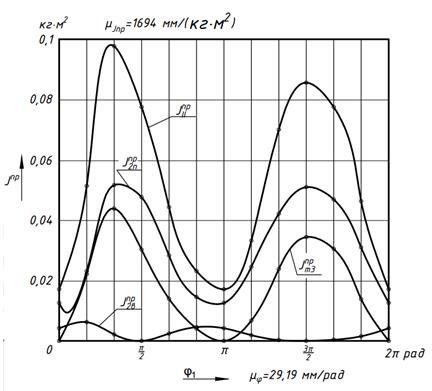
Рис.2.5
Расчет работ и кинетических энергий
1) Работа сил сопротивления за цикл установившегося движения:
 Дж
Дж
где
 - приведенный момент сил сопротивления, определяемый по формуле (2.29)
- приведенный момент сил сопротивления, определяемый по формуле (2.29)
2) Найдем приведенный момент движущих сил:
|
|
|
 Дж
Дж
3) Приведенный суммарный момент:

где:
 - приведенный момент движущих сил, определяемый по формуле (2.34);
- приведенный момент движущих сил, определяемый по формуле (2.34);
- приведенный момент сил сопротивления, определяемый по формуле (2.29).
График суммарного приведенного момента представлен на рис.2.4.
4) Работа суммарного приведенного момента
Данные для построения графика работы суммарного приведенного момента приведены в таблице 2.5
Таблица 2.5 Работа суммарного приведенного момента
| Наименование | Величина | |||||||
| Угол, град | 0 | 30 | 60 | 90 | 120 | 150 | 180 | 210 |
 Дж Дж
| 0 | 13,037 | -5,368 | -26,777 | -34,532 | -26,083 | 0 | 25,335 |
Продолжение таблицы 2.5
| Наименование | Величина | ||||
| Угол, град | 240 | 270 | 300 | 330 | 360 |
 Дж Дж
| 28,215 | 14,891 | -3,546 | -14,308 | 0 |
График работы суммарного приведенного момента представлен на рис.2.6
|
|
|
| |

Рис. 2.6
При установившемся режиме работы изменение угловой скорости характеризуется коэффициентом неравномерности вращения главного вала машины  . Считают этот коэффициент малым и изменение угловой скорости незначительным. Поэтому при расчете кинетической энергии второй группы звеньев вместо переменного текущего значения угловой скорости
. Считают этот коэффициент малым и изменение угловой скорости незначительным. Поэтому при расчете кинетической энергии второй группы звеньев вместо переменного текущего значения угловой скорости  принимают
принимают  .
.
5) Кинетическая энергия второй группы звеньев:

где:
 - приведенный момент инерции второй группы звеньев, определяемый по формуле (2.32).
- приведенный момент инерции второй группы звеньев, определяемый по формуле (2.32).
График кинетической энергии второй группы звеньев приведен на рис.2.6
6) Изменение кинетической энергии первой группы звеньев

где:
 - работа суммарного приведенного момента, определяемая по (2.36);
- работа суммарного приведенного момента, определяемая по (2.36);
 - кинетическая энергия второй группы звеньев, определяемая по (2.37)
- кинетическая энергия второй группы звеньев, определяемая по (2.37)
Находят наибольшее значение изменения кинетической энергии первой группы звеньев.
Расчет в среде MathCad дает следующее значение:
|
|
|

7) Необходимый момент инерции первой группы звеньев
где:
 - наибольшее изменение кинетической энергии первой группы звеньев.
- наибольшее изменение кинетической энергии первой группы звеньев.
 =0,05 – коэффициент неравномерности вращения кривошипа АВ.
=0,05 – коэффициент неравномерности вращения кривошипа АВ.
Соответствующие графики приведены на рисунке 2.6
Дата добавления: 2018-11-24; просмотров: 283; Мы поможем в написании вашей работы! |

Мы поможем в написании ваших работ!