Системы управления роботом и РТК
Под групповым управлением роботами понимается координированное управление движением, позволяющим роботам уклоняться от столкновения друг с другом или с препятствием при выполнении своих функций.
Координация управления движения промышленных роботов проходит две фазы: моделирование движения роботов для прогнозирования возможных столкновений и автоматическое управление роботами, исключающее столкновение их между собой и обход препятствий. Автоматическое управление движением роботов связано с решением двух подзадач планирования траекторий и программирование движений роботов.
Различают методы глобального и локального планирования траекторий. Глобальное планирование и связанное с ним прогнозирование столкновений относится ко всей рабочей зоне роботов. Локальное планирование характерно для текущего положения каждого робота. Методы программирования движений роботов существенно зависят от выбираемых способов планирования траекторий и делятся на два класса: программирование в режиме «OFF-LINE» и программирование в режиме реального масштаба времени. Режим «OFF-LINE» позволяет выполнить программирование до начала движения роботов, следовательно, время, затрачиваемое на программирование в этом режиме, не ограничено. Скорость программирования должна быть соизмерима с темпом выполняемых роботами необходимых движений. Поэтому методы глобального планирования траекторий преимущественно используются совместно с программированием в режиме «OFF-LINE», а методы локального планирования траекторий - с программированием в режиме реального масштаба времени. Существо методов управления, применяемых для решения задач в режиме «OFF-LINE», сходится к прогнозированию запретных для движения роботов зон и последующему глобальному планированию траекторий движения, исключающих их попадания в запретные зоны. Прогнозирование столкновений основано на методе пространства состояний, при котором выполняется геометрическое моделирование пространственного движения нескольких роботов.
|
|
|
Глобальное планирование траектории робота в среде с препятствиями основано на оптимизационных методах. Полученная на основе моделирования в пространстве состояний карта столкновений позволяет решить задачу глобального планирования траектории, используя стратегию уклонения. При этом необходимо найти путь, свободный от зон столкновения, из начальной точки в пространстве состояний в конечную точку. При постановке оптимизационной задачи необходимо найти кратчайший путь.
Решение задачи уклонения в реальном масштабе времени усложняется двумя причинами: во-первых, постановка задачи, как правило, становится динамической, так как приходится рассматривать движение в окрестности препятствия, с учетом неточностей, неопределенных воздействий, разброса во времени срабатывания ПР; во-вторых, из-за ограничений времени на анализ движения трудно разделить этапы обнаружения препятствия и планирования траектории по аналогии с решением задачи в режиме.
|
|
|
Поэтому характерным для управления в реальном масштабе времени является совмещение процедур обнаружения препятствий с локальным планированием траекторий движения. На практике это означает, что коррекция траектории движения должна осуществляться в момент первого обнаружения ближайшего препятствия до распознавания всей карты столкновений.
Метод иерархического нелинейного группового управления позволяет управлять группой роботов.
Рассмотрим систему из двух роботов, функционирующих в плоскости XY. Каждый робот имеет узел поступательного движения, обеспечивающий перемещение соответственно r1(t) и r2(t), и узлы поворота соответственно на углы j1(t) и j2(t). При известных максимальных значениях г1(t) и г2(t), а также jimax в плоскости XY может быть задана максимальная общая рабочая зона, которая и есть зона возможных столкновений.
|
|
|
Если разбить рабочие циклы движения двух промышленных роботов на отрезки, то обнаруживается, что во время прохождения некоторых таких отрезков зоны их движения либо не пересекаются, либо пересекаются лишь небольшие их участки. Для каждого отрезка движения робота может быть определена «фактическая зона возможных столкновений», входящая в максимальную зону возможных столкновений.
Если для прохождения зоны возможных столкновений одному из промышленных роботов дать приоритет в прохождении общей рабочей зоны, то другой промышленный робот должен избегать столкновений с ним только в фактической зоне возможных столкновений. Промышленный робот с низким приоритетом прохождения может пересекать участки фактической зоны возможных столкновений, которые вообще не используются. Такой метод автоматического предотвращения столкновений намного сокращает время простоя и в то же время расширяет допустимую рабочую зону.
На рисунке 4.11 приведена структурная схема системы управления согласованной работой двух ПР с помощью метода линейных развязок.
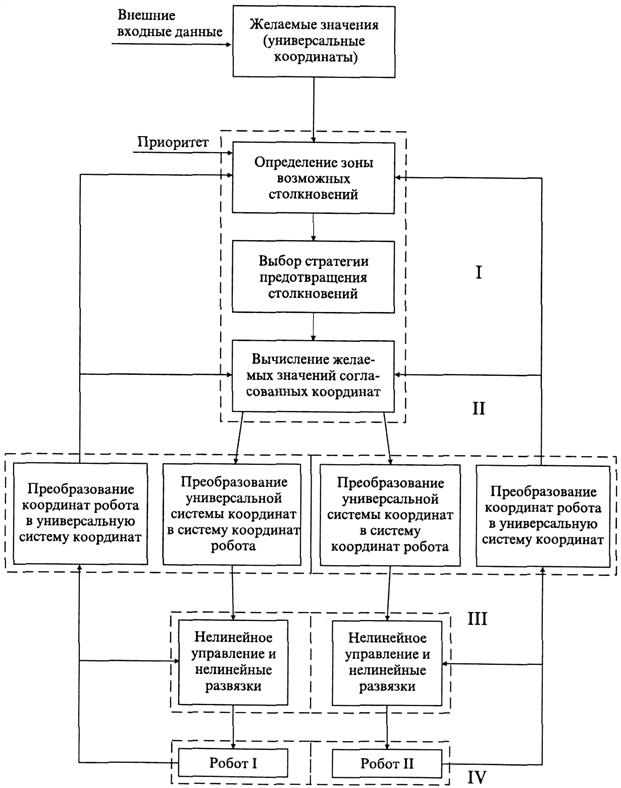
Рисунок - 4.11 Структурная схема СУ согласованной работой двух промышленных роботов
|
|
|
Желаемые значения координат r1, r2, j1, j2 вырабатываются системой управления при непрерывном контроле перемещений элементов соответствующего ПР. В процессе движения элементы ПР в его системе координат преобразуются в универсальную систему и наоборот. Оба промышленных робота подчиняются управляемым командам общего координационного устройства, которое во избежание столкновений согласовывают их действия, присваивая приоритет одному из них. Преобразование координат с помощью соответствующего алгоритма позволяет ПР различных типов адаптироваться к имеющемуся координационному устройству.
Система управления последовательно разбита на различные уровни и может быть представлена как иерархическая, состоящая из нескольких блоков: 1 - расчет положения ПР; 2 - преобразование координат, 3 - управление; 4 - исполнительные механизмы.
Дата добавления: 2018-11-24; просмотров: 270; Мы поможем в написании вашей работы! |

Мы поможем в написании ваших работ!